

25. Дискретна модель стержневої системи. Типи скінченних елементів.
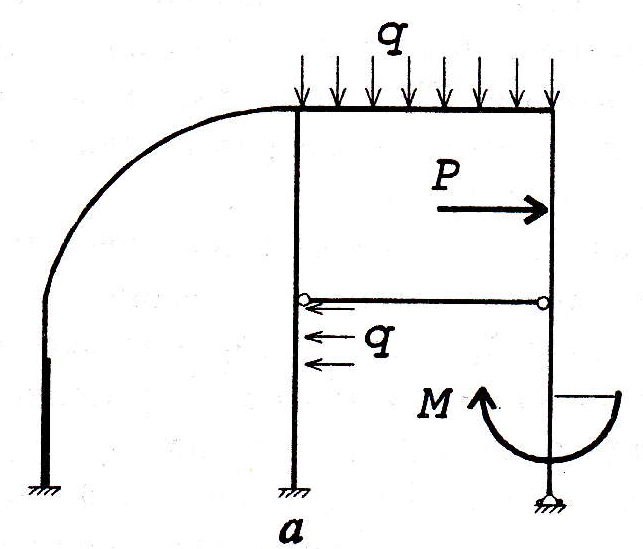
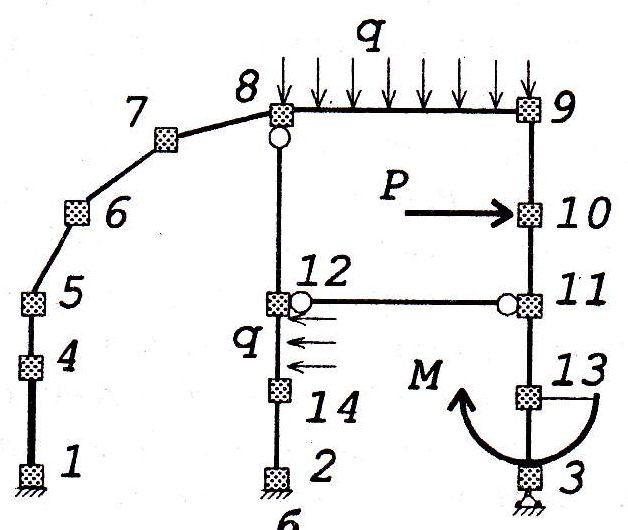
Перший етап розрахунку за методом скінченних елементів полягає в дискретизації, тобто в переході від розрахункової схеми стержневої системи до її дискретної моделі. Вихідна розрахункова схема розбивається на окремі стержні (скінченні елементи) і вузли. Скінченні елементи повинні являти собою прямолінійні стержні постійної жорсткості, на яких може бути розташоване рівномірно розподілене зовнішнє навантаження. Криволінійні стержні апроксимуються кількома прямолінійними елементами. Аналогічно апроксимуються стержні, що мають змінну жорсткість, або ті, до яких прикладено нерівномірно розподілене навантаження. Така схема споруди називається її дискретною моделлю.
Вузлами дискретної моделі вважатимемо точки поєднання двох або більше окремих стержнів, ступінчатої зміни жорсткості стержнів, прикладення зосереджених зовнішніх сил або моментів, ступінчатої зміни інтенсивності розподіленого навантаження, опорні вузли.
Для визначення взаємного розташування вузлів, їх кінематичних і статичних характеристик вводиться загальна для всього об’єкта система декартових координат хоу, яка називається загальною, або глобальною.
Безпосередньо з кожним стержнем пов’язується його власна система координат x’y’.Така система координат називається місцевою, або локальною. Початок місцевої системи координат пов’язується з тим вузлом, який має менший номер. Цю точку називають початком стержня, а точку, яка розташована на протилежному кінці стержня – його кінцем. Вісь x’ спрямовують вздовж стержня від його початку до кінця, а вісь y’ – перпендикулярно до стержня, причому прямий кут відкладається від осі x’ проти руху годинникової стрілки.
У плоскій дискретній моделі можливі чотири типи скінченних елементів, які розділяються між собою граничними умовами, тобто способами примикання до вузлів:
Жорсткий вузол на початку і жорсткий вузол на кінці стержня;
Жорсткий вузол на початку і шарнірний вузол на кінці стержня;
Шарнірний вузол на початку і жорсткий вузол на кінці стержня;
Шарнірні вузли на початку і на кінці стержня.
26.Глобальна і локальна системи координат. Зв’язок між ними.
Для визначення взаємного розташування вузлів, їх кінематичних і статичних характеристик вводиться загальна для всього об’єкта система декартових координат ху, яка називається загальною або глобальною.
Безпосередньо з кожним стержнем пов’язується його власна система координат ху , якою зручно користуватись для аналізу напружено-деформованого стану стержня. Така система координат називається локальною або місцевою. Початок місцевої системи координат повязується з тим вузлом, що має менший номер. Цю точку наз.. початком стержня, а точку, що розташована на протилежному кінці стержня – його кінцем. Вісь х спрямована вздовж стержня від його початку до кінця, а вісь у -- перпендикулярно до стержня, причому прямій кут відкладається від осі х проти ходу годинникової стрілки.