

2.1. Определение высоты полета цели расчетным методом
И змерение
высоты цели может осуществляться на
основе координатной информации (рис.3.1).
Высоту цели относительно земной
поверхности можно найти измеряя на РЛС
наклонную дальность до цели DЦ
и угол азимута . Для
точного измерения высоты цели необходимо
учесть атмосферную рефракцию и кривизну
Земли. Нормальная атмосферная рефракция,
соответствующая стандартной атмосфере,
может быть приближенно учтена переходом
от действительного радиуса земного
шара RЗ к эффективному
RЭ=4/3 RЗ.
В таком случае, пользуясь геометрией
рисунка (3.1) из треугольника ОАЦ по
теореме косинусов определим сторону
ОЦ:
змерение
высоты цели может осуществляться на
основе координатной информации (рис.3.1).
Высоту цели относительно земной
поверхности можно найти измеряя на РЛС
наклонную дальность до цели DЦ
и угол азимута . Для
точного измерения высоты цели необходимо
учесть атмосферную рефракцию и кривизну
Земли. Нормальная атмосферная рефракция,
соответствующая стандартной атмосфере,
может быть приближенно учтена переходом
от действительного радиуса земного
шара RЗ к эффективному
RЭ=4/3 RЗ.
В таком случае, пользуясь геометрией
рисунка (3.1) из треугольника ОАЦ по
теореме косинусов определим сторону
ОЦ:

Запишем выражение (2.2) (учитывая, что
 )
в виде:
)
в виде:

Представим (2.2) как:

Используя приближенное разложение
квадратного корня в степенной ряд
 ,
при
,
при
 получим:
получим:

Упростив выражение, получим:
Учитывая, что радиус земного шара R
= 6368 км, находим
 =8500.
Подставляя это значение в и пренебрегая
малостью величины
=8500.
Подставляя это значение в и пренебрегая
малостью величины
 по сравнению с
по сравнению с
 получим:
получим:
Причем все величины должны быть выражены в км. В реальных РЛС расчет высоты производится по следующей зависимости:
где:
 поправка на рефракцию, причем: Н1
значение высоты соответствующее углу
места цели
поправка на рефракцию, причем: Н1
значение высоты соответствующее углу
места цели
 и стандартной рефракции,
и стандартной рефракции,
 - значение эквивалентной приведенной
температуры при стандартной рефракции.
В ряде РЛС в ЦВС записаны
- значение эквивалентной приведенной
температуры при стандартной рефракции.
В ряде РЛС в ЦВС записаны
 и для расчета Н1
соответствующее нормальной рефракции.
и для расчета Н1
соответствующее нормальной рефракции.
2.2. Определение высоты методом V – образного луча.
1.1.1.1.2.1.4С танция
с V – образным лучом дает возможность
определить все три координаты цели.
Определение дальности и азимута
производится с помощью вертикального
луча, а высота при помощи вертикального
и наклонного.
танция
с V – образным лучом дает возможность
определить все три координаты цели.
Определение дальности и азимута
производится с помощью вертикального
луча, а высота при помощи вертикального
и наклонного.
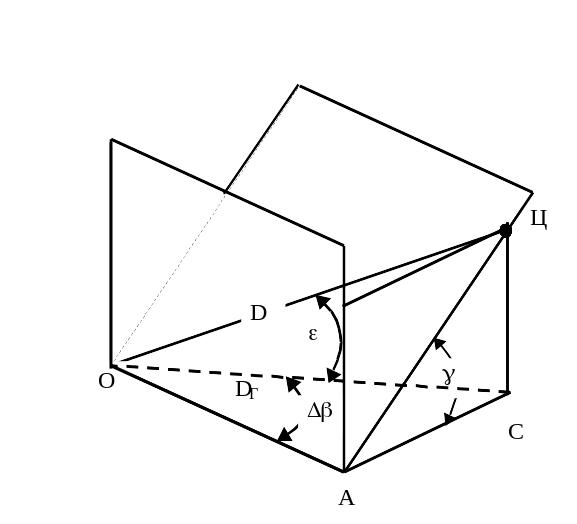
1.1.1.1.2.1.5Определение высоты основано на следующем: антенная система вращается таким образом, что цель вначале попадает в зону действия вертикального луча, а затем наклонного. Угол рис (1.10) на который поворачивается антенная система от момента облучения цели вертикальным лучам до момента облучения наклонным лучом, зависит от угла места цели, что при известной дальности позволяет определить высоту цели. Таким образом определение высоты сводится к определению наклонной дальности до цели и угла .
1.1.1.1.2.1.6Формула, определяющая зависимость высоты от угла и дальности до цели может быть получена при помощи геометрических построений, приведенных на рис. . Заменяя движение лучей относительным движением объекта, обозначим точки пересечения объекта с плоскостями через Б и А. При этом ОБ = ОА = D, ОВ = ОД = DГ. (DГ – горизонтальная дальность до цели).
1.1.1.1.2.1.7П роводим
сечение АВГ, перпендикулярное линии ОИ
(линии пересечения плоскостей ОЖИ и
ОКИ); угол АГВ = 450, угол АВГ = 90 0 следовательно,
треугольник ГВА равнобедренный и ВГ =
АВ = НЦ. Из треугольника ОВГ имеем:
роводим
сечение АВГ, перпендикулярное линии ОИ
(линии пересечения плоскостей ОЖИ и
ОКИ); угол АГВ = 450, угол АВГ = 90 0 следовательно,
треугольник ГВА равнобедренный и ВГ =
АВ = НЦ. Из треугольника ОВГ имеем:

1.1.1.1.2.1.8Из треугольника ОБД получим:
Решая совместно два последних соотношения, получим:
Определение малых высот, связанное с измерением малых углов не может быть точным. Для повышения точности измерения данным способом целей летящих на малой высоте ДНА верхних и нижних лучей раздвигаются на угол (обычно его выбирают равным 100), т.е. вводится дополнительный угол запаздывания второй отметки относительно первой и при расчете высоты вместо измеренного угла необходимо подставить угол - . среднеквадратическая ошибка определения высоты данным способом составляет 150 – 300 м в зависимости от пространственного положения цели относительно РЛС.
Возможен другой вариант нахождения высоты цели методом V – луча по измеренным значениям наклонной дальности и угла . Из рис. 1.10 видно, что
 (1)
(1)
Но т.к. ЦС=АСtg, а =450, то Н=ЦС=АС, тогда справедливо равенство:

 (2)
(2)
Подставив
(2) в (1) получим: (3)
(3)
Последнее равенство позволяет рассчитать значение угла места по измеренному углу . При этом в соответствии с равенствами (1,2) и (3) высота цели равна:
 (4)
(4)
Поскольку РЛС измеряет наклонную дальность до цели, которая связана с горизонтальной соотношением:
 (5)
(5)
Используя
известное тригонометрическое выражение
 ,
которое для нашего случая примет вид:
,
которое для нашего случая примет вид:
 (6)
(6)
Подставив (6) в (5), а последнее в (4) получим:
ВОПРОС №15
Сущность задачи радиолокационного обнаружения целей.
Понятие о вторичном излучении радиоволн. ЭРП цели.
Явление вторичного излучения, лежащее в основе активной радиолокации, свойственно волнам любой природы. Оно возникает всякий раз, когда волна встречает препятствие на пути своего распространения. Падающую на препятствие волну называют первичной, отраженную или рассеянную — вторичной, а препятствие — пассивным вторичным излучателем. Препятствием для радиоволн служат любая неоднородность электрических параметров среды: диэлектрической и магнитной проницаемости, или проводимости. Под действием электрического поля волны на облучаемой поверхности, например проводящей, возникают колебания электрических зарядов. Наведенные при этом токи проводимости являются источником излучения вторичных электромагнитных волн. В диэлектрике таким же источником являются токи смещения.
При изучении явления вторичного излучения рассматривают две группы вопросов: электродинамические и статистические. В первом случае изучаются закономерности вторичного излучения конкретных излучателей в зависимости от соотношения их размеров и длины волны, поляризации облучающего поля, ориентации относительно радиолокатора, геометрической формы и материала облучаемой поверхности. Во втором случае исследуются статистические характеристики поля вторичного излучения при случайной ориентации одного или совокупности вторичных излучателей с учетом особенностей их движения. Эти характеристики существенно влияют на статистическую оценку предельной дальности действия радиолокатора, точности измерения координат и параметров движения цели.
С точки зрения электродинамики (как и динамики волн произвольной природы) важное значение имеет соотношение размеров цели и длины волны. Соответствующую закономерность легко наблюдать на водной поверхности, возбуждая распространяющиеся по ней колебаний определенной длины волны. Если на пути распространения установлен прут, тонкий по сравнению с длиной волны, то он, в свою очередь, возбуждается участками водной поверхности, колеблющимися в фазе. Рассеяние энергии первичной волны невелико и происходит во все стороны равномерно. Если же на пути распространения установлена пластина, широкая по сравнению с длиной волны, то в результате интерференции волн от элементов отражающей поверхности происходит более интенсивное и неравномерное рассеяние энергии. В том направлении, где волны складываются в фазе, вторичное излучение максимально. Наоборот, оно отсутствует в тех направлениях, где элементарные водяные волны гасят друг друга. Аналогично, при вторичном излучении радиоволн в зависимости от соотношения размеров цели и длины волны создаются различные распределения фаз (и амплитуд) токов на облучаемой поверхности и проявляется различный характер интерференции создаваемых этими токами волн в различных точках пространства.
Интенсивность результирующего поля в точке приема, создаваемого в какой-либо момент времени, определяется только теми элементарными отражателями, которые расположены внутри одного разрешаемого объема пространства. Только эти излучатели создают интерферирующие между собой отраженные сигналы. Сигналы, принятые из соседних разрешаемых объемов, во времени не совпадают. В этой связи различают сосредоточенные вторичные излучатели, элементы которых не разрешаются радиолокационной станцией, и распределенные, занимающие в пространстве несколько разрешаемых объемов.
Большинство радиолокационных целей имеют размеры, значительно превышающие длину волны облучающих их колебаний и всегда меньше разрешаемого объема. Конфигурация поверхности цели довольно сложна. Выпуклые и гладкие элементы представляют собой ”блестящие точки” (светящийся элемент поверхности), наряду с которыми на поверхности цели могут быть резонансные элементы и шероховатые участки с диффузным рассеянием, роль которого возрастает с укорочением длины волны.
Отражение от блестящих
точек
Отраженная волна
Падающая волна









Рисунок 1.1.Отражение падающей волны от ”блестящих точек” самолета
Падающая электромагнитная волна наводит на элементах поверхности цели токи проводимости (в проводнике) или токи смещения (в диэлектрике). Эти токи являются источником вторичного излучения в разных направлениях, т. е. происходит рассеяние радиоволн. В результате в точке приема наблюдается интерференционная картина, представляющая собой отражения от отдельных элементов цели, ”блестящих точек”. В зависимости от ракурса наблюдения ”блестящие точки” блуждают, одновременно меняются ракурсы кривизны и их значения. В общем случае у цели может быть несколько блестящих точек, такие так: фюзеляж, нос, крылья, хвост, двигатели, и т.д., дающие максимальный вклад в суммарное отражение (Рис.2.1).
Отражающие свойства цели зависят от ее размеров, конфигурации, материала поверхности, длины волны РЛС, ее поляризации, направления облучения. Для характеристики отражающих свойств цели пользуются обобщенной величиной, учитывающей совокупность указанных выше факторов: эффективной отражающей площадью цели, называемой эффективной площадью рассеяния (ЭПР).
Вопрос №17
Вероятность правильного обнаружения и ложной тревоги. Отношение правдоподобия
Принимаемая реализация содержит помеху и может содержать полезный сигнал

Требуемое значение условной вероятности
правильного обнаружения D
для обзорных РЛС обычно находится в
пределах D=0,5-0,9.
При этом условная вероятность правильного
обнаружения за J
обзоров
 составит:
составит:
 .
.
При оптимизации обнаружения стремятся
свести к минимуму вероятности ошибочных
решений, то есть обеспечить по возможности
значения
 и
и
 .Возникает
потребность в едином показателе качества
обнаружения. Таким показателем может
служить широко применяемый на практике
средний риск ошибочных решений - средняя
плата за ошибки решения задачи обнаружения:
.Возникает
потребность в едином показателе качества
обнаружения. Таким показателем может
служить широко применяемый на практике
средний риск ошибочных решений - средняя
плата за ошибки решения задачи обнаружения:

где
 - стоимость пропуска цели и стоимость
ложной тревоги соответственно.
Универсальный критерий минимума среднего
риска позволяет учесть различную
нежелательность тех и других ошибок:
- стоимость пропуска цели и стоимость
ложной тревоги соответственно.
Универсальный критерий минимума среднего
риска позволяет учесть различную
нежелательность тех и других ошибок:

где
 -
весовой множитель.
-
весовой множитель.
Так как произведение
 -
положительная величина, можно перейти
к другому критерию, равноценному
выбранному весовому:
-
положительная величина, можно перейти
к другому критерию, равноценному
выбранному весовому:
 .
.
Иначе можно записать:
 ,
откуда следует еще один равнозначный
с описанными выше критерий максимума
весовой разности
,
откуда следует еще один равнозначный
с описанными выше критерий максимума
весовой разности
На практике необходимо, чтобы величина
условной вероятности ложной тревоги
находилась в области малых значений и
не превышала заданной величины
 (можно считать, что
(можно считать, что
 ).
Такому требованию отвечает критерий
Неймана-Пирсона, являющийся
разновидностью критерия минимума
среднего риска при ограничении на
вероятность так называемой ошибки
второго рода (в данном случае ложной
тревоги). Согласно этому критерию,
оптимальный обнаружитель обеспечивает
наибольшую условную вероятность
правильного обнаружения из всех
обнаружителей, у которых условная
вероятность ложной тревоги не больше
заданной.
).
Такому требованию отвечает критерий
Неймана-Пирсона, являющийся
разновидностью критерия минимума
среднего риска при ограничении на
вероятность так называемой ошибки
второго рода (в данном случае ложной
тревоги). Согласно этому критерию,
оптимальный обнаружитель обеспечивает
наибольшую условную вероятность
правильного обнаружения из всех
обнаружителей, у которых условная
вероятность ложной тревоги не больше
заданной.
Для принятия решения о наличии цели
используется некая решающая функция
А(у), получающая нулевое или единичное
значения в зависимости от у. Обозначим
плотность вероятности принимаемой
реализацией, когда в ней содержится
сигнал, как
 ,
а в отсутствие сигнала -как
,
а в отсутствие сигнала -как
 -
При этом очевидно, что
-
При этом очевидно, что
 ;
;
Подставив эти выражения для величин D и F в формулу для критерия максимума весовой разности, получим:

где
 -
отношение правдоподобия (ОП).
-
отношение правдоподобия (ОП).
ВОПРОС №18
Оптимальный обнаружитель обеспечивает наибольшую условную вероятность правильного обнаружения из всех обнаружителей, у которых условная вероятность ложной тревоги не больше заданной.
Для принятия решения о наличии цели используется некая решающая функция А(у), получающая нулевое или единичное значения в зависимости от у. Обозначим плотность вероятности принимаемой реализацией, когда в ней содержится сигнал, как , а в отсутствие сигнала -как - При этом очевидно, что
Подставив эти выражения для величин D и F в формулу для критерия максимума весовой разности, получим:
где - отношение правдоподобия (ОП).
Если
 ,
то максимум весовой разности обеспечивает
значение А(у)=1. Если же
,
то максимум весовой разности обеспечивает
значение А(у)=1. Если же
 ,
необходимо, чтобы А(у)=0, Таким образом,
получаем правило оптимального
обнаружения:
,
необходимо, чтобы А(у)=0, Таким образом,
получаем правило оптимального
обнаружения:

Порог
 связан с условной вероятностью ложной
тревоги и выбирается по её максимально
допустимой величине F0.
При этом обнаружитель, построенный в
соответствии с полученным правилом,
будет оптимальным по критерию
Неймана-Пирсона. Его структурная схема
приведена на рис. 1.3.
связан с условной вероятностью ложной
тревоги и выбирается по её максимально
допустимой величине F0.
При этом обнаружитель, построенный в
соответствии с полученным правилом,
будет оптимальным по критерию
Неймана-Пирсона. Его структурная схема
приведена на рис. 1.3.
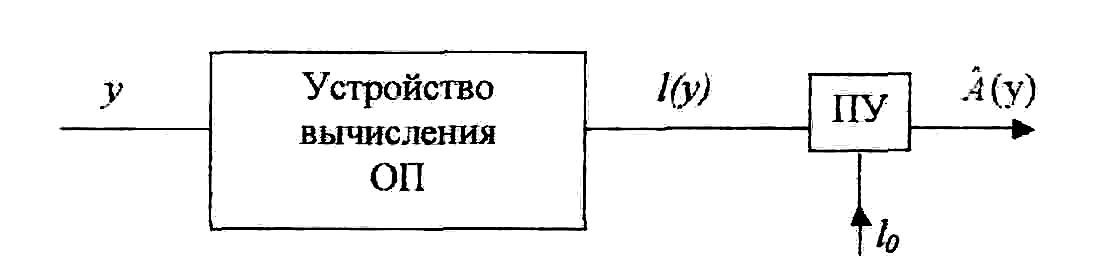
Рис.1.3.
Сравнение отношения правдоподобия 1(у)
с порогом
можно заменить сравнением монотонно
возрастающей функции от него
 с порогом
с порогом
 .
Использование с этой целью логарифмической
функции
.
Использование с этой целью логарифмической
функции
 позволяет упростить алгоритмы оптимального
обнаружения и структуры обнаружителей.
позволяет упростить алгоритмы оптимального
обнаружения и структуры обнаружителей.
ВОПРОС №20
Импульсная и частотная характеристика оптимального фильтра
Известно, что импульсная характеристика линейной цепи и её частотная передаточная характеристика связаны парой преобразований Фурье:

Подставляя
![]() в
требуемое выражение для
в
требуемое выражение для
![]() ,
имеем
,
имеем

С
другой стороны, спектральная плотность
сигнала равна:
Следовательно,
должно выполняться равенство:
![]()
Модуль
передаточной характеристики фильтра
пропорционален модулю спектральной
характеристики сигнала
![]() а
его фаза
а
его фаза
![]()
Рассмотрим
АЧХ и ФЧХ оптимального фильтра для
прямоугольного видеоимпульса![]() ,
спектральная плотность которого
изображена на рис. 1, а , АЧХ оптимального
фильтра с точностью до постоянного
множителя повторяет форму АЧХ сигнала,
а его ФЧХ повторяет ФЧХ сигнала с обратным
знаком с учетом задержки (см. рис. 1, б).
,
спектральная плотность которого
изображена на рис. 1, а , АЧХ оптимального
фильтра с точностью до постоянного
множителя повторяет форму АЧХ сигнала,
а его ФЧХ повторяет ФЧХ сигнала с обратным
знаком с учетом задержки (см. рис. 1, б).

Рис. 1 а, б
Пусть на выходе оптимального фильтра действует сумма сигнала с белым шумом:
![]()
сигнал
характеризуется спектральной плотностью
![]() ,
а шум – спектральной плотностью мощности
N0. Тогда на
выходе фильтра имеем:
,
а шум – спектральной плотностью мощности
N0. Тогда на
выходе фильтра имеем:
![]()
а спектральная плотность мощности шума на выходе будет равна
![]()
Отсюда следует, что шум имеет на выходе спектральную плотность мощности, подобную спектральной плотности амплитуд самого сигнала.
На рис.2 показаны спектральная плотность сигнала (а) и спектральная плотность шума (б) на выходе оптимального фильтра для видеоимпульса длительностью .
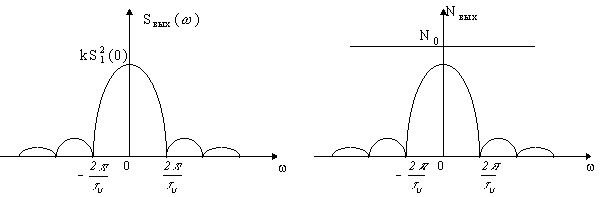
Рис. 2
Ослабление по краям выражается для шума сильнее, чем для сигнала. В результате шум ослабляется в целом сильнее, чем сигнал, Кроме того, благодаря ФЧХ фильтра, все спектральные составляющие сигнала на выходе фильтра в момент t = t0 имеют одну и ту же нулевую фазу.
Таким образом, схема обнаружителя сигнала со случайной фазой имеет вид (рис.3).

ВОПРОС №21
Эффективная площадь рассеяния цели
(ЭПР)
 -
площадь некоторой фиктивной плоской
поверхности, положенной нормально к
направлению падающей волны и являющейся
идеальным и изотропным переизлучателем,
которая, будучи помещена в точку цели,
создает у антенны РЛС ту же плотность
потока мощности, что и реальная цель.
Из определения следует, что полностью
переизлучаемая ЭПР мощность
-
площадь некоторой фиктивной плоской
поверхности, положенной нормально к
направлению падающей волны и являющейся
идеальным и изотропным переизлучателем,
которая, будучи помещена в точку цели,
создает у антенны РЛС ту же плотность
потока мощности, что и реальная цель.
Из определения следует, что полностью
переизлучаемая ЭПР мощность
 , (1.1)
, (1.1)
где
 -
плотность потока мощности падающей
плоской волны у цели (т.е., мощность,
приходящаяся на
-
плотность потока мощности падающей
плоской волны у цели (т.е., мощность,
приходящаяся на
 поверхности
волнового фронта). Плотность потока
мощности у РЛС
поверхности
волнового фронта). Плотность потока
мощности у РЛС
 , (1.2)
, (1.2)
откуда получаем общее выражение для ЭПР
 . (1.3)
. (1.3)
Плотность потока мощности на расстоянии
 у РЛС с учетом же направленных свойств
цели равна
у РЛС с учетом же направленных свойств
цели равна
 . (1.7)
. (1.7)
Это произведение имеет размерность площади и характеризует, какую часть энергии падающей радиоволны получает цель, потери энергии во вторичном излучателе, направленные свойства вторичного излучения.
Тогда, подставляя (1.4), (1.5), (1.6), (1.7) в (1.2), окончательно получим
 , (1.8)
, (1.8)
где
 -
характеризует геометрические свойства
цели,
-
характеризует геометрические свойства
цели,
 - свойство цели избирательно отражать
энергию в определенных угловых
направлениях (анизотропность). Так как
величина
зависит от соотношения размеров цели
и длины волны падающего излучения, то
и ЭПР цели косвенно зависит от этих же
факторов.
- свойство цели избирательно отражать
энергию в определенных угловых
направлениях (анизотропность). Так как
величина
зависит от соотношения размеров цели
и длины волны падающего излучения, то
и ЭПР цели косвенно зависит от этих же
факторов.
Из формулы (1.2), получаем общее выражение для ЭПР:
 . (1.9)
. (1.9)
ВОПРОС №22
Cущество процедур вторичной обработки РЛИ
Процесс вторичной обработки складывается в результате последовательного выполнения следующих операций: обнаружение траекторий целей; сопровождение и оценка параметров траектории.
Обнаружение траектории в процессе вторичной обработки может осуществляться визуально (оператором) или автоматически (вычислительным устройством). Автоматическое обнаружение траектории называется автозахватом.
Для этого после обнаружения цели производится операция вычисления координат цели в последующих циклах обзора, которая называется экстраполяция координат, и точки пространства, соответствующей расчетным значениям координат цели – экстраполированной точкой (ЭТ). Соответственно выделяется экстраполированная зона. Производится стробирование цели.
При попадании отметок в k областей подряд принимается решение об обнаружении трассы цели и она передается на сопровождение. Описанный алгоритм можно рассматривать как обнаружение траектории по критерию "3 отметки из 3-х". Возможны и другие варианты логики обнаружения, например "3 из 4", "4 из 4", "2 из 3" и т.д. В общем случае в строб может попасть несколько отметок, порождаемых ложными и другими целями. Операцию сравнения отметок, попавших в строб, называют сличением или селекцией. После отбора в стробе одной "истинной" отметки необходимо уточнить (сгладить) координаты отметки и вычислить параметры траектории. Сглаженные значения координат и параметры траектории выдаются потребителю.
Наряду с задачами обнаружения, сопровождения целей и выдачи потребителям сглаженных значений координат и параметров траекторий в процессе вторичной обработки может осуществляться прогнозирование (пролонгация) координат целей.
1. Оценка сглаженных параметров траектории цели (координаты, курс, скорость, ускорение и т.д.).
2. Экстраполяция координат ВО и параметров его траектории на один или несколько обзоров.
3. Выделение области пространства, в которой с высокой вероятностью ожидается появление отметки в новом обзоре (стробирование).
4. Сличение параметров экстраполированной точки с параметрами отметок, попавших в строб, и выбор одной из них для продолжения трассы (селекция отметок в стробе).
5. Обнаружение маневра ВО.
Для оценки эффективности ВОИ могут использоваться следующие показатели:
среднее время завязки траектории ВО на выходе РТC коэффициент проводки
средняя длительность разрывов траекторий
коэффициент ложных траекторий
среднее время существования ложных траекторий
ВОПРОС №23
Cтробирование и селекция отметок в стробах
Одной из операций, выполняемых в процессе сопровождения целей, является выделение области, в которой с определенной вероятностью ожидается появление отметки в новом обзоре (стробирование).
Строб представляет собой заранее выбранную область зоны обзора РТС, координаты центра которой совпадают с координатами экстраполированных точек (ЭТ). Размер и форма строба выбираются так, чтобы вероятность попадания в него наблюдаемой отметки (НО), принадлежащей данной трассе была близка к единице.
В строб могут попасть и ложные отметки или отметки, принадлежащие другим траекториям. Поэтому возникает необходимость селекции отметок, попавших в строб, с целью выбора одной отметки, для которой вероятность принадлежности к сопровождаемой трассе является наибольшей. Селекция производится на основе сравнения координат и параметров новых отметок с экстраполированными координатами и характеристиками сопровождаемых трасс.
К числу сравниваемых параметров могут относиться данные о высоте цели, ее составе, признак государственной принадлежности и др. В простейшем случае селекция трасс производится только по координатам отметок.
Стробирование отметок может быть физическим или математическим.
Важной задачей в процессе стробирования отметок трассы является выбор формы и размеров стробов.
Для определения оптимальной формы стробов необходимо найти поверхность равновероятного отклонения НО от ЭТ.
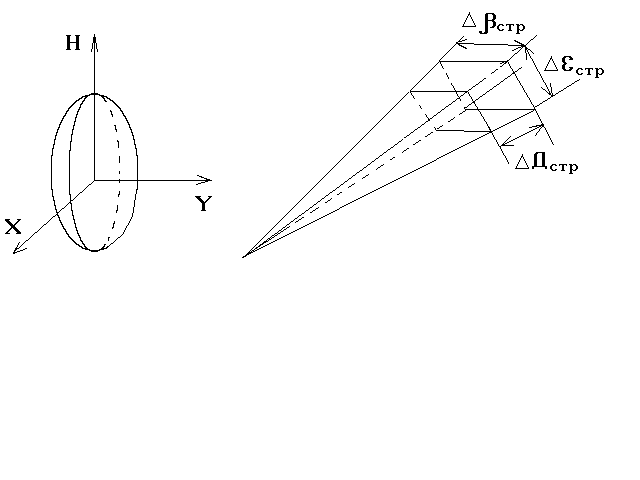
а) б)
Рис. 2. Эллипсоидальный строб (а) и простейший строб (б)
Обычно форма строба выбирается простейшей для задания в той системе координат, в которой осуществляется обработка РЛИ. При обработке в сферической системе координат простейший строб задается линейным размером по дальности ΔДстр и двумя угловыми размерами: по азимуту Δβстр и по углу места Δεстр (рис. 2,б).
Эти размеры установлены заранее, исходя из учета максимальных значений случайных и динамических ошибок по всем подлежащим обработке траекториям.
В качестве координат центра строба выбираются экстраполированные значения дальности Дnэ , азимута βnэ и угла места εnэ , рассчитанные на n-й обзор. Поэтому очередная отметка с координатами Дn , βn и εn считается попавшей в строб, если одновременно выполняются условия
|Дn – Дnэ | ≤ ΔДстр / 2; |βn – βnэ| ≤ Δβстр / 2; |εn – εnэ | ≤ Δεстр / 2 .
При обработке в прямоугольной системе координат x, y, H целесообразно выбрать строб в виде параллелепипеда с параметрами Δхстр, Δустр, ΔНстр. Тогда условия попадания отметки в строб будет определяться неравенствами:
| xn – x*nэ | ≤ Δxстр / 2; | yn – y*nэ | ≤ Δyстр / 2; | Hn – H*nэ | ≤ ΔHстр / 2.
Селекция отметок в стробе.
В строб помимо истинной отметки могут попадать ложные отметки, образованные помехами, прошедшими фильтр первичной обработки, а также отметки траекторий других целей. Попадание ложных отметок в строб создает в нем неопределенную ситуацию, требующую дальнейшего анализа.
При анализе возможны два подхода:
1. Имея несколько отметок в стробе, продолжать траекторию по каждой из них. Траектории, продолженные по ложным отметкам, из-за отсутствия корреляции между последними в соседних обзорах будут через несколько обзоров сброшены, а траектории, продолженные по истинным отметкам, останутся.
2. Выбрать в стробе одну отметку, вероятность принадлежности которой к сопровождаемой траектории наибольшая, и по ней продолжать траекторию, а остальные отметки отбросить как ложные.
Оптимизация процесса селекции отметок по их отклонениям от центра строба производится по критерию максимального правдоподобия, в соответствии с которым за истинную отметку надо принимать ту, для которой функция правдоподобия максимальна.
Упрощением рассмотренного оптимального алгоритма является алгоритм селекции по минимуму суммы квадратов линейных отклонений координат отметки от центра строба.
ВОПРОС №24