

ВОПРОС №1
Определение радиолокации, угла места и азимута цели
Радиолокация наука о методах и средствах получения сведений об объектах за счет приема и анализа радиоволн, отраженных или излученных этими объектами. Получаемые сведения составляют радиолокационную информацию. Объекты, радиолокации называют радиолокационными целями.
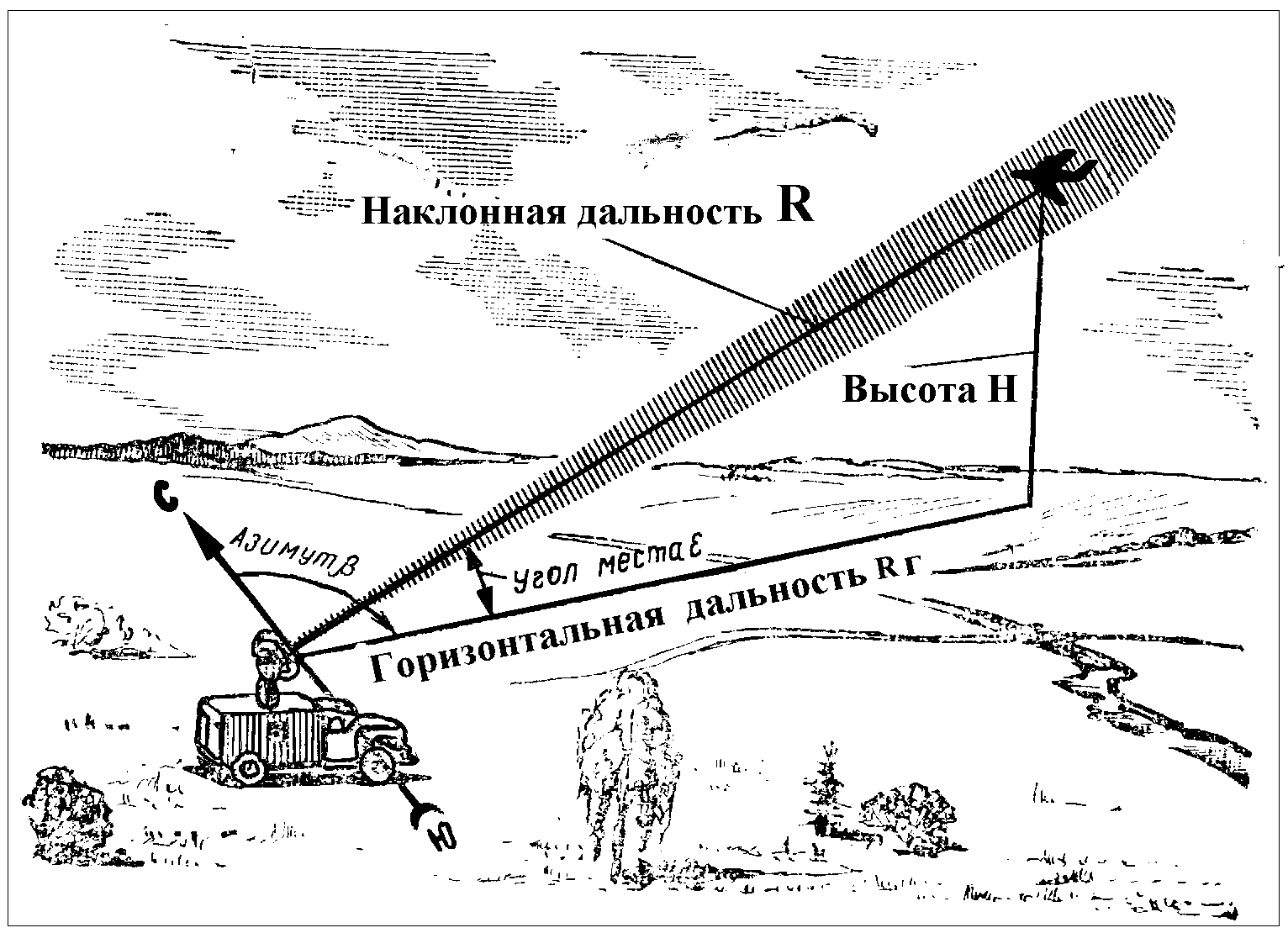
Азимутом ц объекта называется отсчитываемый по часовой стрелке угол между направлением на север и проекцией на горизонтальную плоскость прямой, проходящей через начальную точку и объект. Угол между этой прямой и её проекцией называют углом места цели ц.
ВОПРОС №2
Физические явления, лежащие в основе радиолокационных методов обнаружения, определения координат и скорости перемещения целей в пространстве.
Задачу наблюдения и навигации с использованием радиоволн возможно решать благодаря их распространению в однородной среде с постоянной скоростью с (в вакууме с = 3·108 м/с), что позволяет измерять проходимые ими расстояния.
Изменение длины траектории распространения радиоволн из-за движения объекта приводит в силу эффекта Доплера к изменению частоты сигнала. По изменению частоты можно оценить радиальную скорость перемещения или выделить сигналы от движущихся целей на фоне мешающих отражений от неподвижных объектов.
Трансформация сигналов при отражении от объектов зависит от физических свойств материалов, конфигурации и параметров движения объектов. Эта зависимость обусловливает возможность распознавания радиолокационных целей. В радионавигации распознавание осуществляется проще, обычно путём передачи индивидуальных кодов распознаваемыми объектами.
Координаты объекта определяют по расположению относительно него ориентиров или других характерных признаков местности. Это осуществляется путем сравнения наблюдаемых с помощью бортовых датчиков (например, бортовых РЛС) параметров, характеризующих местность, над которой движется объект, с хранящимися в памяти системы эталонными параметрами. В радиотехнических обзорно-сравнительных системах наблюдаемыми параметрами являются высоты точек рельефа местности, дальность и угловые координаты радиолокационных ориентиров.
ВОПРОС №3
Задачи, решаемые РЛС.
В радиолокационном наблюдении можно условно выделить следующие задачи:
- обнаружение целей;
- измерение их координат и параметров движения;
- разрешение целей;
- распознавание и опознавание целей.
Обнаружение осуществляется на основании анализа принимаемых колебаний и состоит в принятии решения о наличии или отсутствии цели в просматриваемом элементе пространства.
Измерение заключается в получении оценок координат и параметров движения радиолокационных целей.
Разрешение раздельное обнаружение и определение положения в пространстве нескольких объектов с мало различающимися координатами и параметрами движения.
Распознавание (классификация) отнесение объекта к какому-либо из выделенных классов. Разбиение на классы может осуществляться произвольно, например, по назначению: бомбардировщик, истребитель, крылатая ракета. Особое значение имеет определение принадлежности цели к одному из классов "свой" и "чужой", то есть так называемое опознавание, обычно считающееся отдельной задачей.
ВОПРОС №4
Суть активной радиолокации с активным ответом.
В активной радиолокации излучаются зондирующие сигналы, генерируемые радиопередающим устройством РПдУ
Излучение целью ответного сигнала при получении запросного характерно для активной радиолокации с активным ответом (рис.1.3). Использование систем активной локации с активным ответом позволяет обеспечить высокое качество радиолокационного наблюдения при низких энергетических затратах за счет приема прямого, а не отраженного сигнала, а также возможность получения от цели передаваемой ею информации - как об измеряемых параметрах (например, высоте полета), так и дополнительной (о государственной принадлежности и индивидуальном номере цели, запасе топлива и др.).
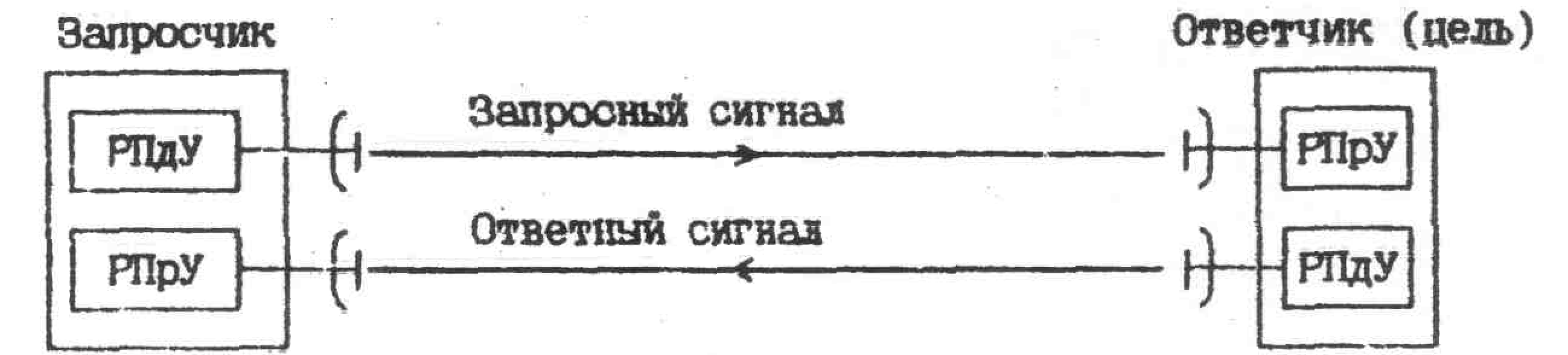
1.1.1.1.1Рис.1.3
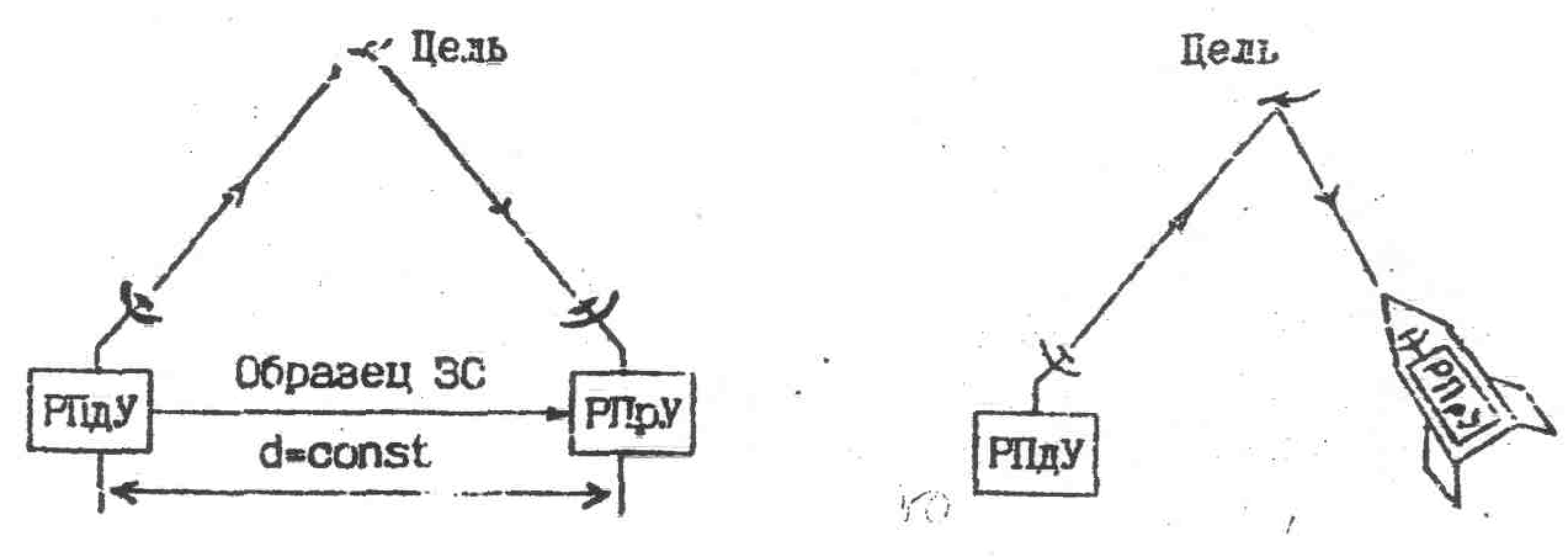
Если приёмное и передающее устройства совмещены, то радиосистема (станция) называется однопозиционной. Ее достоинство заключается в возможности использования одной и той же антенны на передачу и на прием. Разнесенные системы являются многопозиционными. В двухпозиционных системах активной локации приёмное и передающее устройства располагаются на расстоянии d друг от друга. Такие системы могут быть наземными, для которых характерно постоянное расстояние между передающим и приемным пунктами рис.1.4.
ВОПРОС №5
Суть полуактивной и пассивной радиолокации
При размещении передающего пункта, излучающего зондирующим сигнал (сигнал подсвета), на земле, а приемника отраженного сигнала на самонаводящейся ракете это расстояние является переменным (рис.1.5), и такие системы называют системами полуактивной локации.
В пассивной радиолокации осуществляется только прием собственного радиоизлучения целей (рис.1.6). Источником этого излучения могут являться радиотехнические устройства связи, навигации, локации, радиопротиводействия, ионизированные области атмосферы в окрестности цели, образуемые при работе ракеты и ядерном взрыве, а также нагретые части цели, обусловливающие излучение в инфракрасном и миллиметровом диапазонах электромагнитных волн. Принимаемые сигналы обрабатываются в пункте обработки (ПО) располагаемом отдельно либо совмещаемом с одним из приемных пунктов.
1.1.1.1.2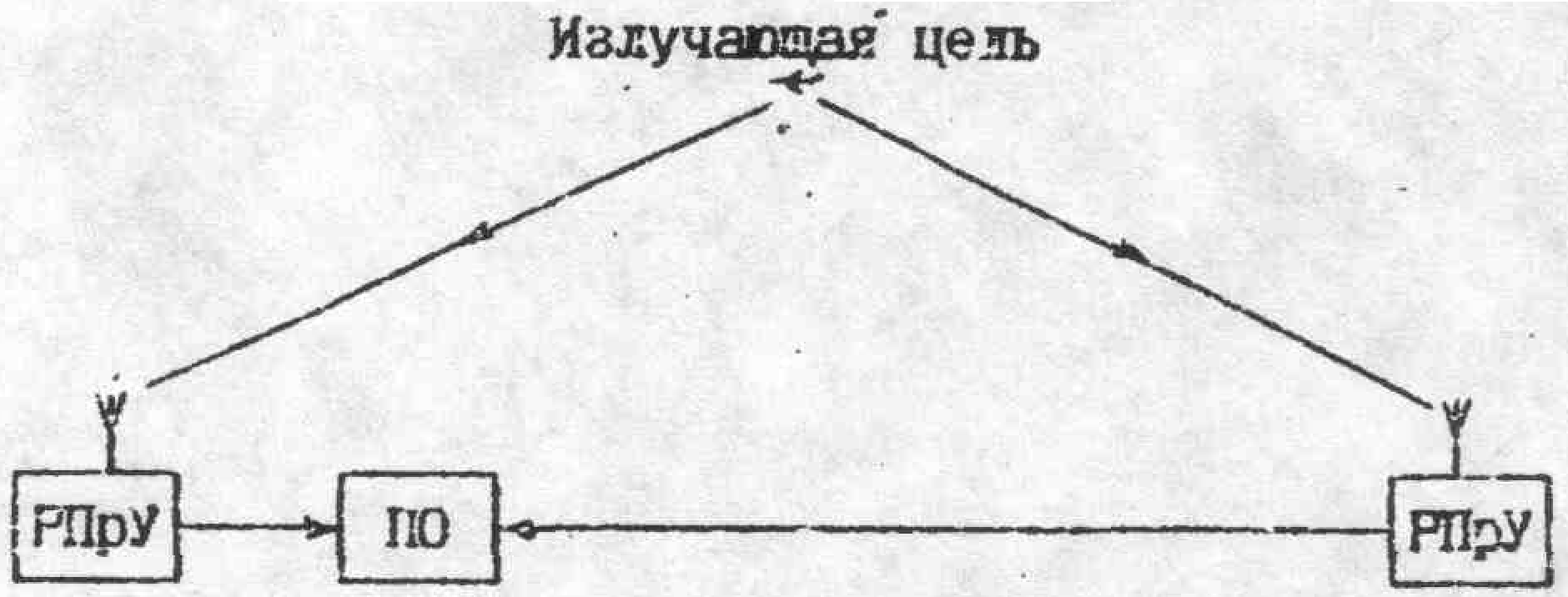
ВОПРОС №6
Способы обзора пространства РЛС
Область пространства, в пределах которой осуществляется радиолокационное наблюдение, называется зоной обзора. Элементы этой зоны могут наблюдаться непрерывно, либо последовательно.
П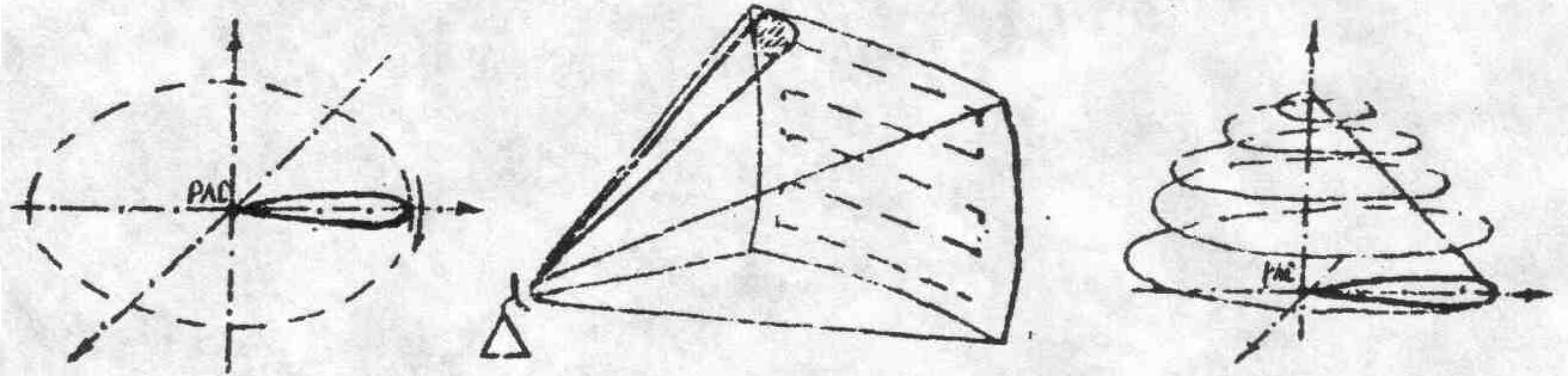 оследовательный
обзор осуществляется за счет сканирования
лучей диаграммы направленности антенны
РЛС. В зависимости от траектории
сканирования различают круговой
(риc.l.8),
растровый (рис.1.9) и спиральный (рис.1.10)
виды обзора. Требуемый темп выдачи
информации о целях обеспечивается
правильным выбором скорости сканирования.
оследовательный
обзор осуществляется за счет сканирования
лучей диаграммы направленности антенны
РЛС. В зависимости от траектории
сканирования различают круговой
(риc.l.8),
растровый (рис.1.9) и спиральный (рис.1.10)
виды обзора. Требуемый темп выдачи
информации о целях обеспечивается
правильным выбором скорости сканирования.
1.1.1.1.2.1.1
1.1.1.1.2.1.2
1.1.1.1.2.1.3 Рис.1.8 Рис.1.9 Рис.1.10
С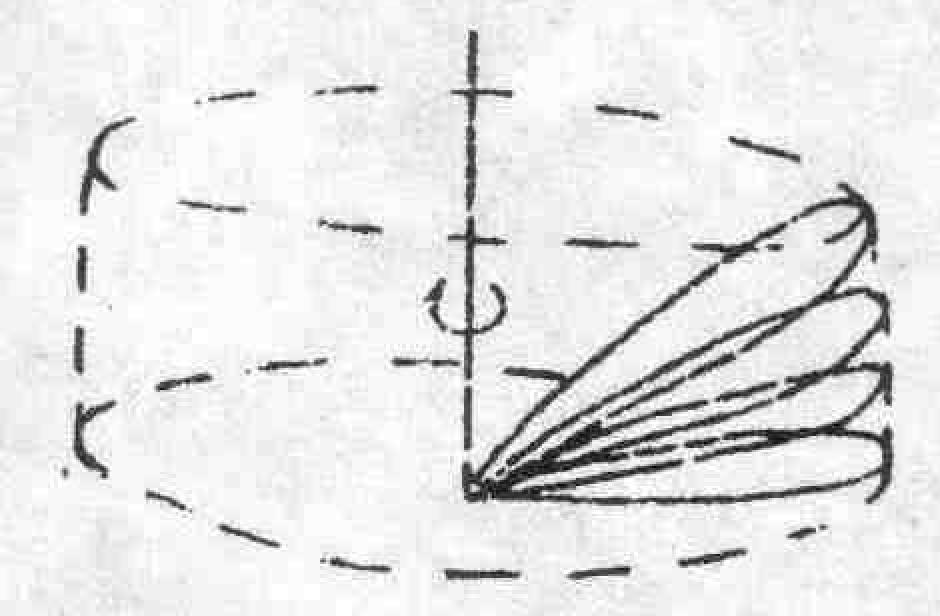 мешанный
обзор дает возможность разумного
использования достоинств параллельного
и последовательного. В обзорных РЛС,
например, обзор по азимуту может быть
последовательным, осуществляемым путем
вращения антенны, а по углу места -
параллельным за счет многолепестковости
диаграммы направленности приемной
антенны (рис. 1.11)
мешанный
обзор дает возможность разумного
использования достоинств параллельного
и последовательного. В обзорных РЛС,
например, обзор по азимуту может быть
последовательным, осуществляемым путем
вращения антенны, а по углу места -
параллельным за счет многолепестковости
диаграммы направленности приемной
антенны (рис. 1.11)
ВОПРОС №7
Виды радиолокационных сигналов, используемых в РЛС.
Зондирующие импульсы Дальность до цели

 определяется
путём измерения времени запаздывания
отражённого импульса относительно
зондирующего.
определяется
путём измерения времени запаздывания
отражённого импульса относительно
зондирующего.

Частотно модулированный сигнал
Частотный метод определения дальности основан на использовании частотной модуляции излучаемых непрерывных колебаний; время запаздывания определяется путём измерения разности частот излучённых колебаний и отражённого сигнала.
Генератор высокой частоты, управляемый модулятором, вырабатывает колебания с частотой, изменяющейся по периодическому закону (рис.2.4, сплошная линия). Частота сигнала, отражённого от неподвижной цели, будет изменяться по такому закону, но только со сдвигом по временной оси на время запаздывания tD.
На рис. 2.4, а частота отражённых колебаний показана штриховой линией. Отражённые сигналы и колебания генератора подводятся к смесителю. Образующаяся на выходе смесителя разностная частота (рис.2.4, б) (частота биений) пропорциональна дальности цели. Если круговая частота излучения
Также используется фазовая модуляция.
Фазовые методы основаны на измерении разности фаз излучённых синусоидальных колебаний и принятых радиосигналов.Генератор создаёт незатухающие колебания частоты w0, излучаемые в пространство. Фаза излучённых колебаний
![]() ,
,
где y1 – начальное значение фазы.
Фаза принимаемого сигнала
![]() .
.
Здесь yотр – фазовый сдвиг, связанный с отражением радиоволны от цели;
yРЛС – фазовый сдвиг в цепях РЛС, который можно считать известным, так как он поддаётся измерению и может быть учтён.
Принятые колебания сравниваются с колебаниями высокочастотного генератора; разность фаз пропорциональна дальности цели
|
(2.5) |
или
|
(2.6) |
Данный метод измерения практически не используют по двум обстоятельствам. Во–первых, очень мал диапазон однозначного измерения и, во–вторых, в формулу (2.6) входит неизвестная величина yотр.
ВОПРОС №8
Обобщённая структурная схема РЛС и пояснение её функционирования
Обобщённая функциональная схема РЛС (рис.1.1) должна включать в свой состав: передающую и приёмную части, антенный переключатель, антенну и индикатор.
Задача передающей части заключается в формировании зондирующего сигнала с заданными параметрами в требуемый момент времени. Для импульсной РЛС, излучающей зондирующий сигнал в виде последовательности простых или сложных радиоимпульсов, такими параметрами являются: τи - длительность импульса; f0 - частота высокочастотного колебания; и - период следования (повторения) импульсов; Ри – импульсная мощность или связанные с ней средняя мощность (Р0) и энергия (Ес) зондирующего сигнала; закон внутриимпульсной модуляции; форма огибающей импульса.
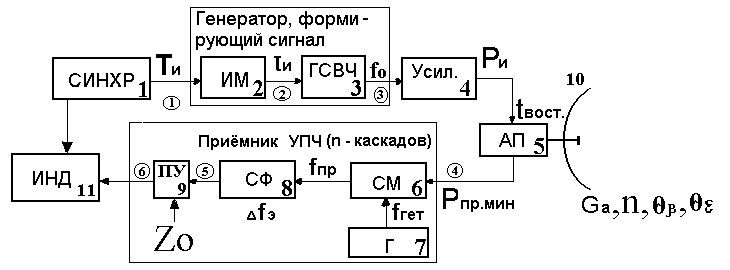
Рисунок 1.1. Упрощённая функциональная схема импульсной РЛС
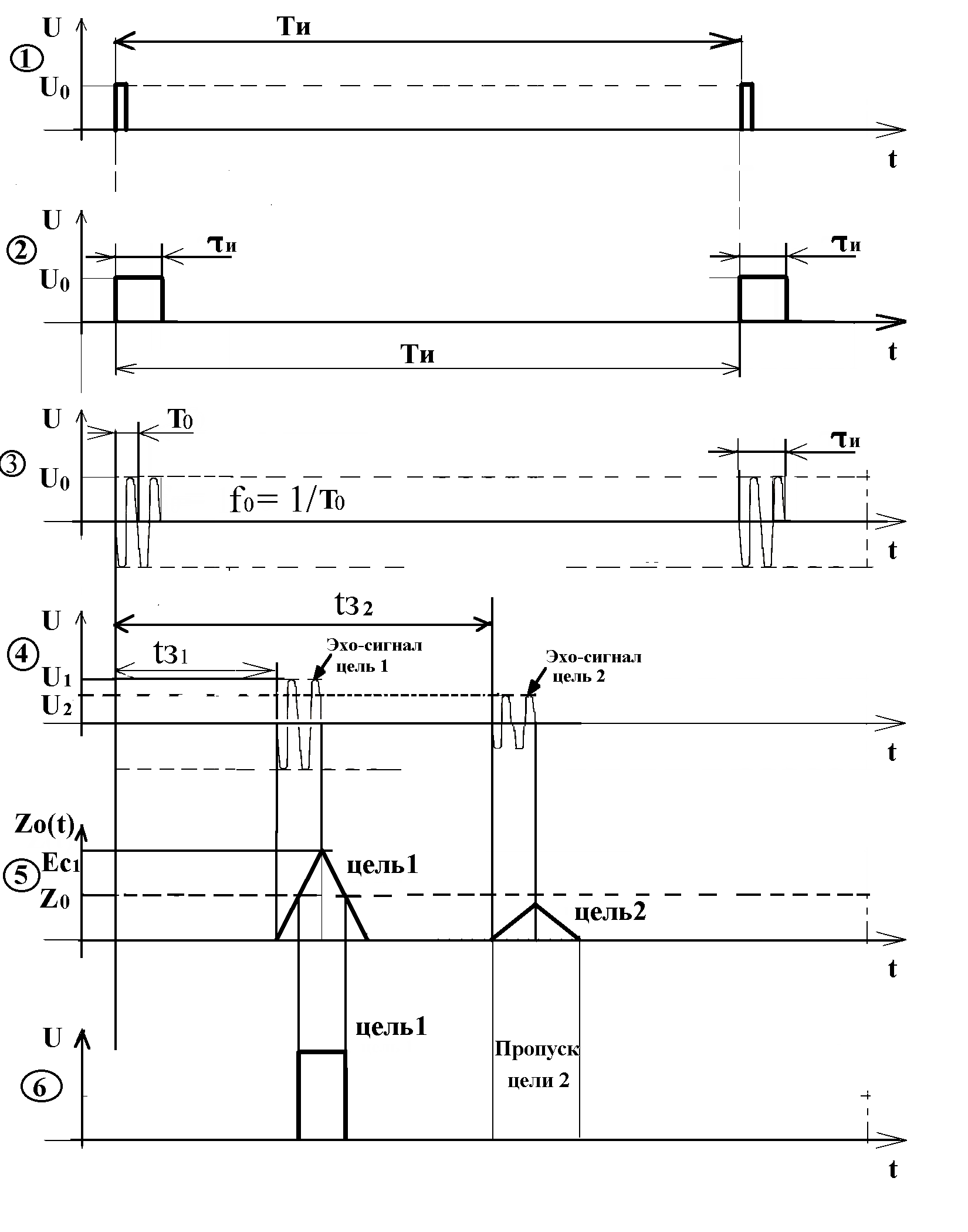
Синхронизатор задаёт период повторения импульсов и
Импульсный модулятор задаёт длительность импульсов (τи).
Генератор
СВЧ колебаний (рис.1.1, 3) задаёт частоту
высокочастотного колебания (f0),или,
что одно и то же, длину волны излучаемого
сигнала
 .
.
Усилитель мощности задаёт импульсную мощность зондирующего сигнала.
Антенный переключатель (рис.1.1, 5) – быстродействующее переключающее устройство, которое защищает приёмник в момент излучения мощного сигнала.
Приёмник должен обеспечить выделение полезного эхо-сигнала
ВОПРОС №9
Основные технические и тактические характеристики РЛС, пояснить их связь.
1.2. Технические характеристики РЛС
Технические характеристики РЛС – это система показателей, описывающая основные параметры устройств, входящих в состав РЛС. Система включает в свой состав те параметры РЛС, которые оказывают существенное влияние на возможность и качество решения задач радиолокации. К основным техническим характеристикам РЛС относятся:
1.Несущая частота f0 или рабочая длина волны излучаемых колебаний (см, дм или м диапазон).
2. Вид и параметры зондирующего сигнала:
- длительность импульсаτи;
- период повторения импульсов и или частота следования зондирующих импульсов Fи;
- вид огибающей, закон внутриимпульсной модуляции.
3. Мощность излучения: Рср - средняя мощность излучения; Ри - импульсная мощность.
5. Чувствительность приёмника Рпр мин.
6. Параметры антенной системы:
- коэффициент усиления антенны Gа;
- форма и ширина диаграммы направленности антенны в азимутальной и угломестной плоскостях , ;
-число оборотов в минуту, совершаемых антенным лучом n.
1.3. Тактические характеристики РЛС
Систему показателей, используемых для оценки боевых возможностей РЛС и проведения тактических расчетов, принято называть тактическими характеристиками РЛС. Основными из них являются:
состав выдаваемой информации;
зона обзора (форма зоны и её параметры);
точность выдаваемой информации;
разрешающие способности по измеряемым координатам;
помехозащищённость;
информационная способность;
надёжность;
электромагнитная совместимость;
маневренные характеристики (время развёртывания и свёртывания, время включения и выключения, мобильность ).
Состав выдаваемой информации определяется, главным образом, требованиями потребителей информации и решаемыми задачами. В общем случае информация, выдаваемая РЛС, должна содержать следующие сведения:
- пространственные координаты целей;
государственную и индивидуальную принадлежность;
характеристику цели (одиночная или групповая) и по возможности количественный состав групповой цели;
виды создаваемых помех и их интенсивность.
Зона обзора. Зоной обзора РЛС называется область пространства, в
пределах которой РЛС способна осуществляется наблюдение за радиолокационными объектами. Размеры зоны обзора определяются техническими характеристиками РЛС.
Форму зоны обзора РЛС в угломестной плоскости (Рис.1.4) принято характеризовать графиком зависимости R=f(H), где R – расстояние до границы зона обзора; H - высота полёта цели над поверхностью земли, а также размерами зоны в азимутальной плоскости.
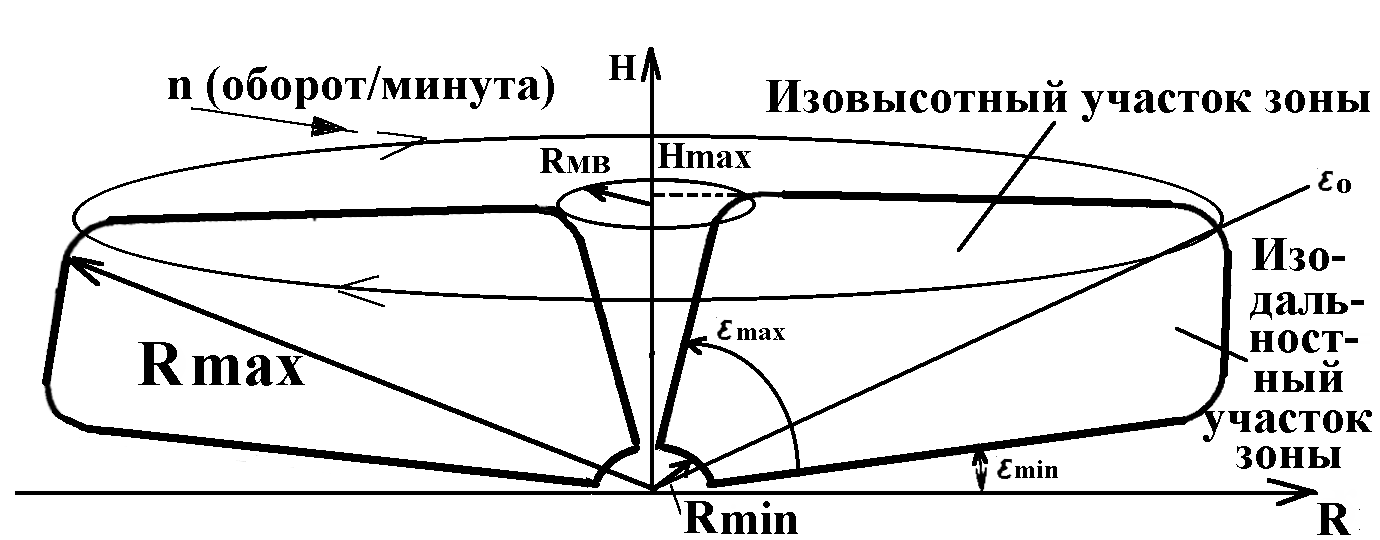
Рисунок 1.4. Вид зоны обзора импульсной РЛС кругового обзора в угломестной (вертикальной) плоскости
Форму зоны в угломестной плоскости в РЛС обнаружения и наведения обычно выбирают такой, чтобы для углов места min < < 0 обеспечивалась максимально возможная дальность обнаружения (изодальностный участок зоны), а для углов места, превышающих угол 0 – максимальная высота обнаружения ( изовысотный участок зоны).
Изовысотная зона характеризуется тем, что интенсивность принимаемых эхо-сигналов от одинаковых целей, находящихся на одной высоте, одинакова в пределах дальности действия РЛС. Для этого добиваются более интенсивного излучения и приёма на малых углах места, по сравнению с большими значениями угла места.
Параметрами зоны обзора являются:
- минимальная R min и максимальная R max дальности;
- минимальный min и максимальный max азимутальные углы;
- минимальный (min ) и максимальный (max ) углы места зоны.
Форма зоны в азимутальной плоскости определяется задаваемыми значениями min и max. В общем виде она представляет собой сектор в азимутальной плоскости. Для импульсной РЛС кругового обзора он составляет 3600(рис.1.5).
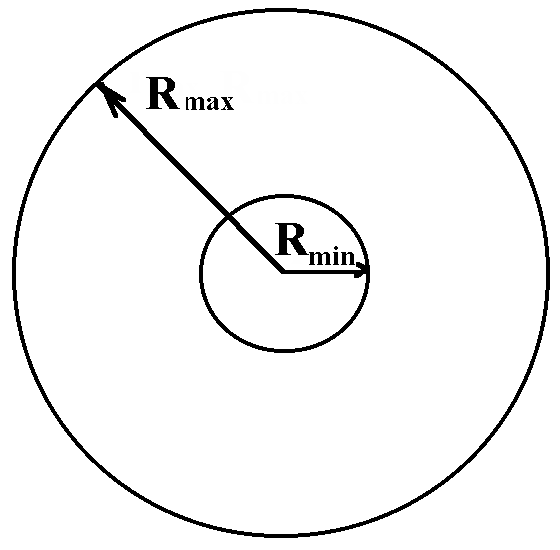
Рисунок 1.5. Вид зоны обзора импульсной РЛС кругового обзора в азимутальной (горизонтальной) плоскости
Верхняя граница зоны обзора по дальности
:
 .
.
Минимальная дальность, начиная с которой
одноантенная РЛС принимает эхо-сигналы
от целей:
 ,
,
где tв- время переключения антенного переключателя (восстановление чувствительности приёмника).
Минимальная дальность, на которой невозможно принять эхо-сигнал, часто называют «мёртвой зоной». Эхо-сигналы от целей, находящихся в «мёртвой зоне», утрачиваются.
Точность выдаваемой информации. Применительно к РЛС обнаружения и наведения под точностью выдаваемой информации понимают точность измерения координат и параметров движения цели. Точность измерения координат является важнейшим показателем РЛС. Она характеризуется ошибкой измерения, представляющей собой разность между истинным и измеренным значением координаты. Поскольку эта разность – случайная величина, то для количественной оценки точности чаще всего используют среднюю квадратическую ошибку измерения.
Разрешающие способности по измеряемым координатам. Разрешение осуществляется по выходному сигналу системы обработки принимаемых эхо-сигналов, несущему информацию о координатах и скорости цели. Различия двух целей по дальности, угловым координатам и радиальным скоростям проявляются, соответственно, в разном времени запаздывания эхо-сигналов, различном направлении прихода и в неодинаковых доплеровских смещениях несущей частоты. Разрешение целей может быть основано на разделении эхо-сигналов по любому из указанных параметров:
 –
разрешающая способность по дальности;
–
разрешающая способность по дальности;
 -
разрешающая способность по азимуту;
-
разрешающая способность по азимуту;
 -
разрешающая способность по углу места;
-
разрешающая способность по углу места;
 -
разрешающая способность по радиальной
скорости.
-
разрешающая способность по радиальной
скорости.
Разрешающая способность существенно влияет на возможности РЛС по определению группового состава обнаруженных целей и помехозащищённости станции от маскирующих пассивных помех.
Помехозащищённость. Помехозащищённость – это свойство РЛС выполнять свои задачи с допустимым снижением качества в условиях помех. В условиях действия различного рода помех РЛС прежде всего должна обеспечивать показатели качества обнаружения (D,F), на уровне не хуже заданного, и точность измерения координат.
Информационная способность.
Информационной способностью РЛС
называют максимальное количество целей,
по которым РЛС может одновременно
выдавать информацию заданного качества
при установленной дискретности (периоде
обновления). Потенциальные возможности
РЛС по информационной способности
определяются количеством раздельно
наблюдаемых целей. Так, импульсный
дальномер может одновременно выдавать
информацию по тысяче целей. Его
информационная (пропускная) способность
равна отношению разности максимальной
и минимальной дальности к разрешающей
способности по дальности:

Надёжность. Надёжность РЛС – это свойство РЛС сохранять во времени способность выполнять свои задачи в заданных режимах и условиях применения, технического обслуживания, ремонта, хранения и транспортировки. Наиболее распространёнными показателями надёжности РЛС являются: средняя наработка на отказ То, интенсивность отказов и вероятность безотказной работы.
Электромагнитная совместимость. Электромагнитной совместимостью радиоэлектронных средств называют их свойство выполнять в заданной электромагнитной обстановке свои задачи без ухудшения качественных показателей. РЛС не должна создавать помехи другим радиоэлектронным средствам (РЛС, системам связи и управления). РЛС должна противостоять воздействию помех, создаваемых другими радиоэлектронным средствами.