

Трикутник зустрічі.
Небезпека зіткнення двох літаків, що здійснюють прямолінійний політ з постійними швидкостями на одній висоті, виявляється в результаті розв'язання так називаного "трикутника зустрічі" (рис. 10.5 ).

Відстань між літаками визначається виразом
![]() (10.2)
(10.2)
де
![]() - відносна швидкість літаків;
- відносна швидкість літаків;
![]() швидкість зближення, яка дорівнює
складовій відносної швидкості, спрямованої
уздовж лінії, що зєднує літаки; θ1-
пелені
другого літака щодо напрямку польоту
першого; φ
відносний
курс; d0
- відстань
між літаками в початковий момент часу
t
= 0.
швидкість зближення, яка дорівнює
складовій відносної швидкості, спрямованої
уздовж лінії, що зєднує літаки; θ1-
пелені
другого літака щодо напрямку польоту
першого; φ
відносний
курс; d0
- відстань
між літаками в початковий момент часу
t
= 0.
Час до найбільшого зближення tзбл визначається в результаті диференціювання (10.2) дорівнюючи нулю
![]() (10.3)
(10.3)
Відстань між літаками dзбл в момент найбільшого зближення знаходиться підстановкою виразу для tзбл (10.3) у вираз (10.2)
![]() (10.4)
(10.4)
де VH - складова відносної швидкості, спрямованій перпендикулярно до лінії, що з'єднує літаки
![]()
На практиці виявлення повинне здійснюватися задовго до моменту реально можливого зіткнення, у цьому випадку d>>dзбл і час до найбільшого зближення ^збл обчислюється, використовуючи апроксимацію
![]() (10.5)
(10.5)
Недоліки тау-критерію, що використовуються в системах попередження зіткнень.
Недоліком
"тау"
критерію є
те, що в більшості випадків
![]() ,
і, отже, по мірі наближення до точки
найбільшого зближення виникає помилка,
що тим більше, чим більше
,
і, отже, по мірі наближення до точки
найбільшого зближення виникає помилка,
що тим більше, чим більше
![]() .
.
Інший недолік критерію виявляється при повільному зближенні літаків, коли згідно (10.5), (10.6) спрацьовує сигналізація загрози, у той час як безпечна відстань між літаками забезпечено.
Для
усунення зазначених недоліків розроблені
модифікації "тау"
критерію, де
вводиться поріг спрацьовування по
дальності
![]() ,
що залежить від рівня чутливості.
Модифікований критерій записується
,
що залежить від рівня чутливості.
Модифікований критерій записується
![]() (10.7)
(10.7)
Для
того, щоб забезпечити своєчасне виявлення
небезпечного зближення в тому випадку,
якщо літак, що загрожує, летить з постійним
прискоренням
![]() ,
необхідно мати додатковий запас по
відстані
,
необхідно мати додатковий запас по
відстані
![]() .
Модифікований критерій (10.7) по суті
враховує прискорення, рівне
.
Модифікований критерій (10.7) по суті
враховує прискорення, рівне
![]() .
.
Використовуючи векторне позначення, записати й зобразити відносну швидкість літаків.
Використовуючи векторне позначення, записати і зобразити відносну швидкість двох літаків.
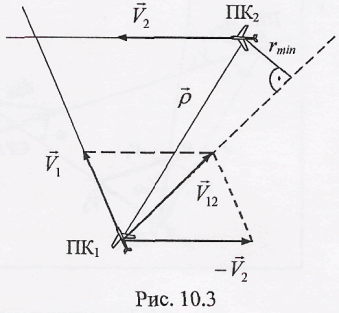
У загальному випадку, якщо рух двох літаків ГТК1 і ПК2 у просторі задано векторами
швидкостей V1 і V2 (рис. 10.3), те максимальне зближення літаків (відстань розходження) визначається з виразу
![]()
де V12 = V1 - V2 - вектор відносної швидкості.

Визначення час польоту до моменту, коли відстань між двома літаками буде найменшою.
У загальному випадку, якщо рух двох літаків ГТК1 і ПК2 у просторі задано векторами
швидкостей V1 і V2 (рис. 10.3), те максимальне зближення літаків (відстань розходження) визначається з виразу
де V12 = V1 - V2 - вектор відносної швидкості.
Час досягнення максимального зближення визначається формулою
![]()
За умови постійних швидкостей літаків час tCPA, коли відбудеться максимальне зближення літаків, може бути визначено також з виразу
![]()
де
t0
- час
початку аналізу,
![]() - вектор
відстані між літаками в момент часу t0
. Тоді
вектор відстані між літаками у момент
часу tCPA
визначиться
за формулою
- вектор
відстані між літаками в момент часу t0
. Тоді
вектор відстані між літаками у момент
часу tCPA
визначиться
за формулою
![]()
а мінімальне значення відстані дорівнює
![]()
Прогнозований конфлікт визначається, якщо значення rCPA менше встановленої мінімальне припустимої відстані rпр (норми ешелонування) між літаками, тобто
![]()