

Критерії оцінки конфліктних ситуацій.

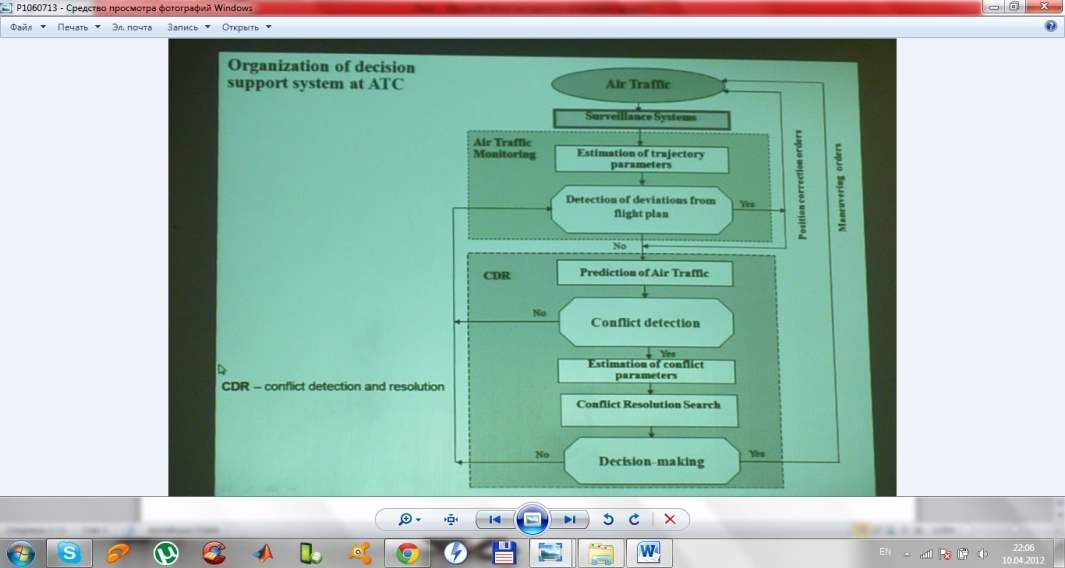
Організація і функції системи підтримки прийняття рішення для кпр.

Автоматизація прийняття рішень в системі кпр.
Д о
автоматичних методів, коли система
вико-нує розрахунок одного або декількох
маневрів і пропонує оператору затвердити
один з маневрів, належать: – оптимізаційні
методи; – методи потенціалів; – генетичні
алгоритми. Метод жорстких схем маневрів
застосовують при необхідності для
використання набору за-здалегідь
визначених типів траєкторій (бортові
системи GPWS). При розрахунку маневру
оптимізаційними методами (система
ARC2000) використовується пошук оптимальних
траєкторій відповідно до деякого
оптимізаційного функціоналу. Оптимі-зація
проводиться як у локальних масштабах,
тобто для одного або двох ПС [11], так і у
глоба-льних масштабах – для всієї
сукупності ПС [12], що істотно збільшує
обсяг обчислень і робить багато методів
практично нереалізованими на-віть при
сучасному рівні комп’ютерної техніки.
о
автоматичних методів, коли система
вико-нує розрахунок одного або декількох
маневрів і пропонує оператору затвердити
один з маневрів, належать: – оптимізаційні
методи; – методи потенціалів; – генетичні
алгоритми. Метод жорстких схем маневрів
застосовують при необхідності для
використання набору за-здалегідь
визначених типів траєкторій (бортові
системи GPWS). При розрахунку маневру
оптимізаційними методами (система
ARC2000) використовується пошук оптимальних
траєкторій відповідно до деякого
оптимізаційного функціоналу. Оптимі-зація
проводиться як у локальних масштабах,
тобто для одного або двох ПС [11], так і у
глоба-льних масштабах – для всієї
сукупності ПС [12], що істотно збільшує
обсяг обчислень і робить багато методів
практично нереалізованими на-віть при
сучасному рівні комп’ютерної техніки.

П ри
оптимізації безпечних маневрів
викорис-товують такі основні критерії:
– різні міри просторового відхилення
від по-чаткової траєкторії; – мінімум
безпечної відстані між конфлікту-ючими
ПС; – часове відхилення від запланованого
при-буття в контрольну точку; – тривалість
маневру; – ступінь відхилення керуючих
швидкісних і кутових параметрів; –
витрати палива; – пріоритети ПС; –
пріоритети типів маневрів; – комфорт
пасажирів; – складність маневрів.
ри
оптимізації безпечних маневрів
викорис-товують такі основні критерії:
– різні міри просторового відхилення
від по-чаткової траєкторії; – мінімум
безпечної відстані між конфлікту-ючими
ПС; – часове відхилення від запланованого
при-буття в контрольну точку; – тривалість
маневру; – ступінь відхилення керуючих
швидкісних і кутових параметрів; –
витрати палива; – пріоритети ПС; –
пріоритети типів маневрів; – комфорт
пасажирів; – складність маневрів.
Завдання і функції моніторингу повітряної обстановки в АС КПР.

Концепція застосування MONA.


Схема контролю відхилень у системі MONA.


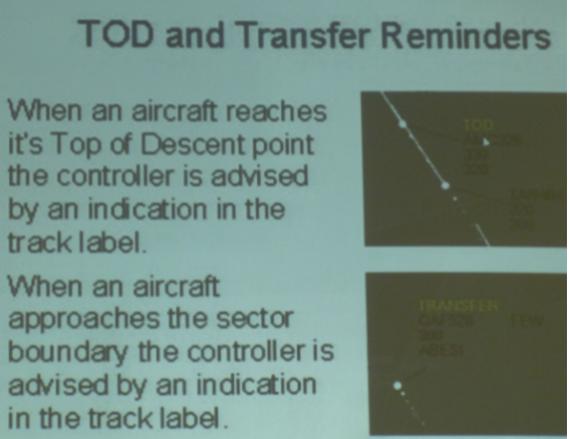
Функція нагадувань у систем MONA.

Система попередження зіткнення літаків, «тау» критерій.




Time of minimum approaching of aircraft
![]() =
=![]()
![]()
![]() -- Distance vector between aircraft at
-- Distance vector between aircraft at ![]()
![]() )
)![]()
![]()
Conflict
Detection: if ![]()
TCAS. Призначення, функції, принцип дії.
TCAS (Traffic alert and Collision Avoidance System) - современная система безопасности созданная предотвращать столкновения воздушных судов в воздухе. По стандарту ICAO, система TCAS должна быть установлена на все воздушных судах тяжелее 5700 кг или сертифицированных для перевозки более 19 пассажиров.
Принцип работы системы заключается в сканировании окрестности, опрашивая TCAS установленные на других воздушных судах. Полученные сигналы обрабатываются с целью вычисления расстояния, схождение и высоту относительно собственного воздушного судна. Оценку расположения воздушных судов отображается в виде символов на дисплее навигации.
В случае если TCAS обнаруживает перекрытие траектории или критически-маленькое расстояние от другого самолета он воспроизводит визуальную и звуковую сигнализацию. При необходимости TCAS так же воспроизводит визуальные и звуковые команды для предотвращения столкновения. Если другой самолет использует TCAS II и команды подаваемые системой координируются другим самолетом, то система сделает так, что оба самолет буду направлены в одинаковом направлении для ухода с траектории перекрытия. Еще три самолета может быть скоординировано.
Система TCAS может давать указания только в вертикальном направлении, т.е. если вы летите на максимальной высоте она может вам выдать команду на подъем.
Для правильной работы TCAS вместе с ней должны быть запущены следующие системы:
- IRS. Передает данные о вертикальном движении самолета;
- Датчики положения;
- Радиовысотомер;
- Реле земля/воздух;
- GPWS;
- AC Bus 3. Электропитание.
Д ля
эффективной работы системы необходимо
чтобы все самолеты были снабжены
ответчиками TCAS, так же существенными
ограничениями является то что TCAS может
выдавать указания только на набор или
снижение высоты и то что система
управления воздушным движением не
получает данных об указаниях TCAS.
ля
эффективной работы системы необходимо
чтобы все самолеты были снабжены
ответчиками TCAS, так же существенными
ограничениями является то что TCAS может
выдавать указания только на набор или
снижение высоты и то что система
управления воздушным движением не
получает данных об указаниях TCAS.