

2.5.3 Выбор закона автоматического управления в общем виде
Чтобы выбрать регулятор и рассчитать параметры его настройки, необходимо знать следующее:
Динамические параметры объекта регулирования.
Коэффициент передачи объекта
Ко=![]()
Постоянная времени объекта
То=187,91c
Полное запаздывание
τ3=66,79с
Величину максимально возможного возмущения по нагрузке в процессе эксплуатации объекта управления
Ув=15%
Основные показатели качества переходного процесса
Максимально допустимое динамическое отклонение регулируемой величины
Хд<25![]()
Максимально допустимое статическое отклонение регулируемой величины
Хст<10![]()
Допустимое время регулирования
tрег<900с
По этим известным величинам рассчитываем следующее
Величину, обратную относительному времени запаздывания находим по формуле
![]() (2)
(2)
подставив значения, получим
66,79/187,91=0,36
Допустимое относительное время регулирования находим по формуле
![]()
(3)
Допустимый динамический коэффициент регулирования находим по формуле
 (4)
(4)
подставив в эту формулу значения, получим
![]()
Д![]() опустимое
остаточное отклонение регулируемой
величины находим по формуле
опустимое
остаточное отклонение регулируемой
величины находим по формуле
![]() (5)
(5)
подставив в эту формулу значения, получим
![]()
выразим эту величину в процентах
![]() 28%
28%
В Автоматизированных системах используется один из трёх типовых процессов регулирования:
- апериодический
- с 20% перерегулированием
- С min квадратичной ошибкой.
В данной САР выбираем апериодический процесс регулирования, т.к система, не должна допускать колебаний в замкнутой системе регулирования. величина времени регулирования должна быть минимальной.
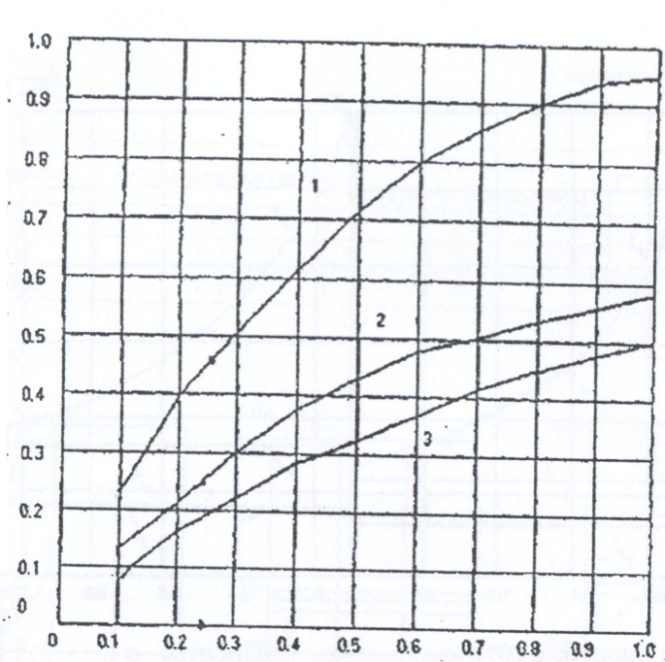
По графикам (Рисунок 3) Rд = f(τ/Т) выбираем простейшие законы регулирования ( П, ПИ, ПИД), которые обеспечивают необходимое значение динамического коэффициента регулирования Rд.
1 – И - закон; 2 – П - закон; 3 – ПИ-закон; 4 – ПИД -закон.
Рисунок 3. Динамический коэффициент регулирования на статических объектах.
Rд = 0.69, по графику видно, что И-регулятор не подходит, т.к. не обеспечивает допустимое значение Rд
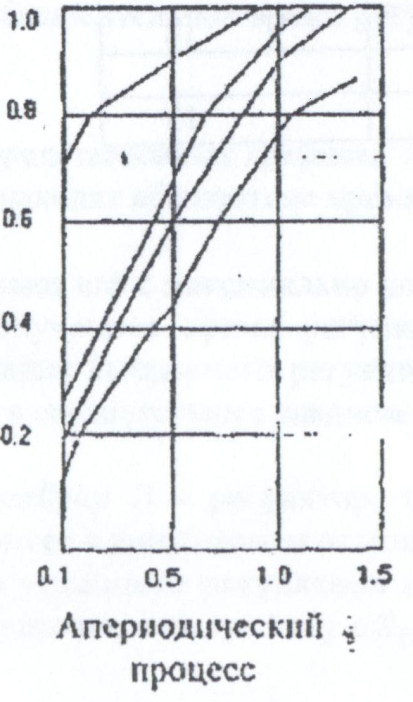
Выбираем П-регулятор. Т.к. выбран П-регулятор, то необходимо определить величину остаточного отклонения Хст и сравнить ее с допустимым остаточным отклонением. По графику (Рисунок 4) определяю ΔХст1:
1 –
апериодический процесс; 2 – процесс с
20%-ным перерегулированием; 3 – процесс
с min
![]() .
.
Рисунок 4. Остаточное отклонение на статических объектах:
ΔХст1=0.550С
По значению ΔХст1 определяю величину фактического остаточного отклонения :
Хст= ΔХст1*К0*ув
Подставив значения в эту формулу, получим
Хст= 0.55*2.4*15= 19,80С
Так как допустимое значение Хст<100С , следовательно П-регулятор не подходит.
Выбираю ПИ-регулятор. Необходимо проверить, обеспечит ли выбранный регулятор заданное допустимое время регулирования (tрег).доп.
(tрег).доп. =900 с.
По графику (Рисунок 5) определим
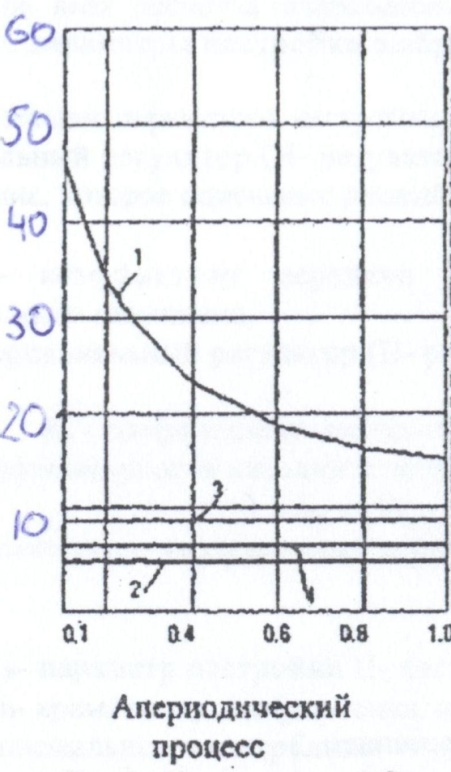
1 – И-регулятор; 2 – П-регулятор; 3 – ПИ-регулятор; 4 – ПИД-регулятор.
Рисунок 5. Относительное время регулирования на статических объектах:
tpег =66,79 *8= 534,32с
tрег<( tрег)доп , следовательно ПИ-регулятор подходит.
Приближенное определение настроек регулятора произведем по следующим формулам
Коэффициент усиления регулятора найдем по формуле
![]() (6)
(6)
![]()
Время удвоения (изодрома) найдем по формуле
Tи=0,6*Т0 (7)
Tи=0,6*187,91=112,75 с
Составление математической модели системы управления
Объект управления на структурной схеме САУ представляется виде соединения двух звеньев:
Апериодического и звена чистого запаздывания (рис. 6)
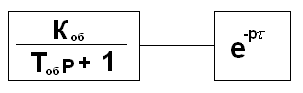
Рисунок 6. Структурная схема объекта управления
Автоматический регулятор на структурной схеме САУ представляется в виде соединения трех звеньев (рис.7)

Рисунок 7. Структурная схема автоматического регулятора.
Система автоматического управления представляет собой совокупность объекта управления и автоматического регулятора определенным образом взаимодействующих друг с другом.
Регулирование расхода газа и температуры в пространстве нагревательной печи
Локальная САР температуры может быть представлена двухконтурной системой регулирования с внутренним контуром регулирования расхода газа и внешним контуром регулирования температуры или одноконтурной системой. Структурная схема модели объекта в системе регулирования температуры взята из [3] и представлена на рис 8.
Рисунок 8 – Структурная схема модели объекта в системе регулирова–ния температуры
– звено 1: безинерционный усилитель;
– звено 2: множительное устройство;
– звено 3: безинерционный усилитель;
– звено 4: квадратичная функция;
– звено 5: апериодическое звено;
– звено 6: степенная функция;
– звено 7: линия задержки.
Следующая схема, представленная на рис. 9, включает в себя учет начальной температуры печи – режим “дежурного газа” и исполнительный механизм типа МЭО.
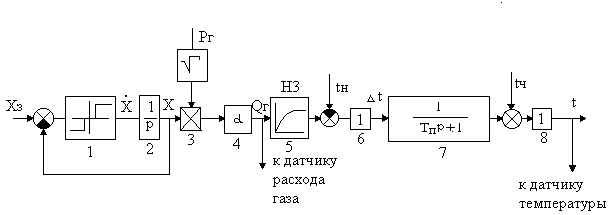
Рисунок 9 – Структурная схема модели объекта, исполнительного механизма типа МЭО в системе регулирования температуры
Контур регулирования расхода газа изображен на рис.10. Звено 1 моделирует порог чувствительности регулятора газа. Объект регулирования в контуре обладает сравнительно небольшой инерционностью, связанной, в основном, с инерционностью исполнительного механизма.
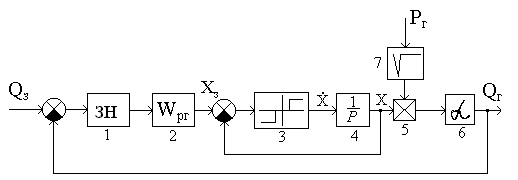
Рисунок 10 – Контур регулирования расхода газа, положения ИМ
В качестве обобщенной схемы модели можно использовать структуру, представленную на рис.11.
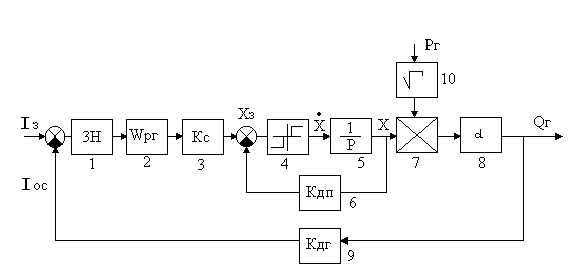
Рисунок 11 – Контур регулирования расхода газа, положения ИМ
Внешним контуром по отношению к контуру регулирования расхода газа является контур регулирования температуры.
Регулирование соотношения “газ-воздух” в пространстве нагревательной печи.
Печи снабжаются воздухом для горения турбовоздуходувными машинами (вентиляторами). Обычно от одной магистрали снабжается несколько печей. Регулирование расхода воздуха производится с помощью регулирующего клапана. В случае если одна печь снабжается от отдельной воздуходувной машины, более экономичным способом регулирования количества подаваемого в печь воздуха является изменение частоты вращения турбины с помощью регулируемого электропривода. Задание на величину подачи воздуха в печь подается на вход соответствующего регулятора от системы регулирования расхода газа и корректируется от системы контроля состава дыма. Регулятор температуры воздействует на количество подаваемого в печь воздуха, а регулятор соотношения газ-воздух изменяет расход топлива согласно заданному соотношению. Конкретному расходу газа соответствует вполне определенная подача воздуха, обеспечивающая полноту сгорания топлива и не позволяющая выбрасывать несгоревшее топливо или охлаждать печь за счет избыточной подачи воздуха в печь.
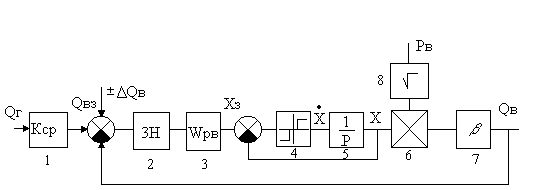 Рисунок 12 – Схема
регулирования соотношения расхода
воздуха и расхода газа.
Рисунок 12 – Схема
регулирования соотношения расхода
воздуха и расхода газа.
Регулирование давления в рабочем пространстве нагревательной печи
Давление в рабочем пространстве печи зависит от количества подаваемого в печь газа, воздуха, количества получающихся продуктов сгорания и положения шиберов отводящей системы, изменяющих сопротивление дымоотводящего тракта. Количество отводимого дыма и давление в печи регулируется с помощью одного или нескольких регулирующие шиберов в дымовом борове. Удаление продуктов сгорания производится с помощью дымососов. Поскольку большинство печей не являются герметичными объектами, величина давления в рабочем пространстве печи существенно влияет на ее работу. Если давление в печи ниже давления окружающего пространства, то осуществляется подсос холодного воздуха в печь, что приводит к снижению температуры и дополнительному расходу топлива. При существенном положительном перепаде давлений продукты сгорания будут в значительном количестве выбрасываться из печи в цех, что тоже нежелательно. Изменение подачи газа и воздуха при неизменном положении шиберов или изменение положения шиберов при постоянной подаче газа и воздуха приводит к тому, что через некоторое время наступает новое равновесное состояние, т. е. процесс обладает свойством самовыравнивания. В связи с этим модель объекта по каналу регулирования давления можно представить следующим образом (рис.13 ).
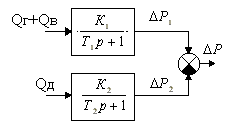
Рисунок 13– Схема модели объекта по каналу регулирования давления
В модели учитывается, что увеличение расхода газа и воздуха увеличивает давление в печи, а увеличение сечения дымоотводящего тракта, т. е. открытие шиберов – уменьшает его. Коэффициенты и постоянные времени каналов различны.
Регулирование давления осуществляется шиберами, т. к. расход газа и воздуха задается в зависимости от заданной температуры и может быть принят постоянным. Изменение расхода топлива и воздуха для систем регулирования давления могут рассматриваться как одно из возможных возмущений. На рис.14 приведена модель системы регулирования давления.
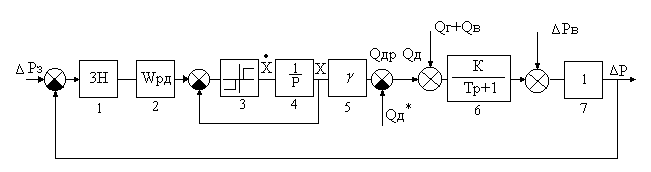 Рисунок 14– Схема
регулирования давления в рабочем
пространстве печи.
Рисунок 14– Схема
регулирования давления в рабочем
пространстве печи.
Общая структурная схема объекта управления с учётом взаимосвязей его параметров представлена в приложении 3. Она содержит звенья, соответствующие моделям исполнительных механизмов и моделям, описывающим связи между такими основными параметрами процесса, как расход газа и воздуха, давления и температуры.