

2.5 Математическое описание сар и выбор автоматического управляющего устройства (ауу)
2.5.1 Определение математической модели объекта- статические характеристики, кривая разгона, частотные характеристики
Определение статических и динамических характеристик теоретическими или экспериментальными методами является первым этапом разработки САР. Объектом управления является методическая нагревательная печь. Данный объект является статическим объектом, обладает свойством самовыравнивания и находится в установившемся режиме, т.к. соблюдается материальный и энергетический баланс, т.е. приток различных веществ в объект равен их расходу из объекта, а количество получаемой энергии равно количеству отданной энергии. Объект управления является инерционным, т. е. с запаздыванием. Передаточная функция статического объекта с запаздыванием будет следующей:
![]() ,
(1)
,
(1)
где
![]() – коэффициент передачи объекта;
– коэффициент передачи объекта;
![]() – постоянная
времени объекта, сек;
– постоянная
времени объекта, сек;
![]() – время запаздывания,
сек.
– время запаздывания,
сек.
Экспериментально
определяем динамические параметры
объекта управления: запаздывание
![]() ,
постоянную времени
,
постоянную времени
![]() ,
коэффициент передачи
,
коэффициент передачи
![]() .
.
![]() – величина
ступени. В установившемся режиме получаем
на выходе системы функцию реакции цепи
на ступенчатое воздействие
– величина
ступени. В установившемся режиме получаем
на выходе системы функцию реакции цепи
на ступенчатое воздействие
![]() .
Зафиксируем изменение во времени
реакции, т.е. получим график кривой
разгона объекта [7] (рис.2).
.
Зафиксируем изменение во времени
реакции, т.е. получим график кривой
разгона объекта [7] (рис.2).
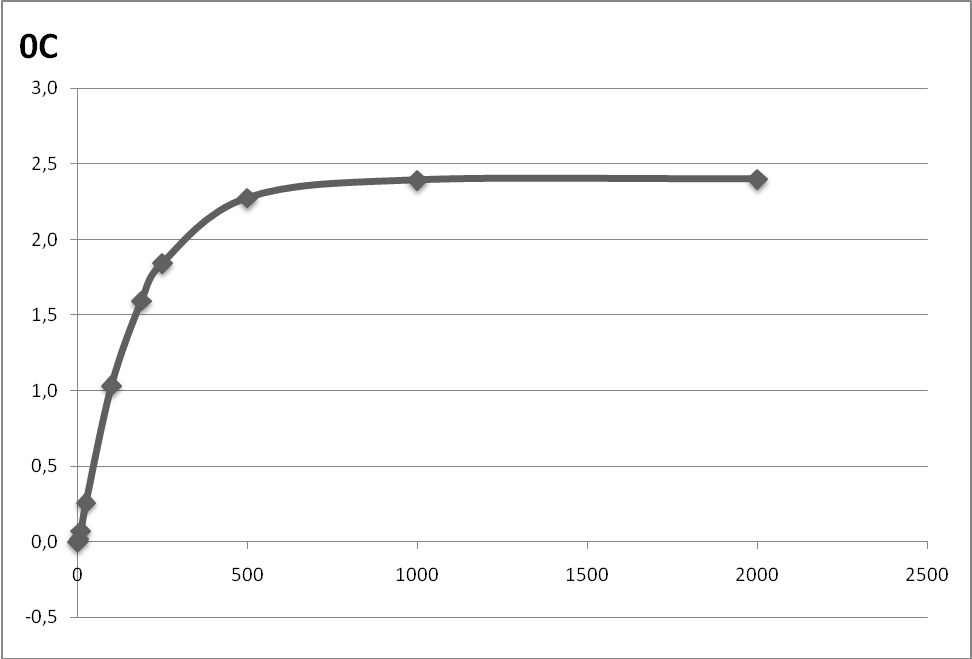
Рисунок 2– График переходной характеристики объекта управления
По рисунку 2
определяем
![]() и постоянную времени объекта
и постоянную времени объекта
![]() :
:
![]()
![]()
Коэффициент объекта управления
Ко=![]()
Передаточная функция объекта управления примет вид:
![]()
2.5.2 Определение передаточных функций измерительно-преобразовательных устройств и исполнительных устройств
В качестве исполнительных устройств в газовых и воздушных магистралях применяются устройства типа МЭО. Они представляют собой электродвигатели переменного тока, управляемые бесконтактными реверсивными пускателями. Кроме того, в устройстве имеется датчик положения исполнительного механизма, позволяющий контролировать выполнение команды на перемещение рабочего органа. В модели САР нагрева металла исполнительный механизм может быть представлен следующей структурой [ 9] , представленной на рис 3.
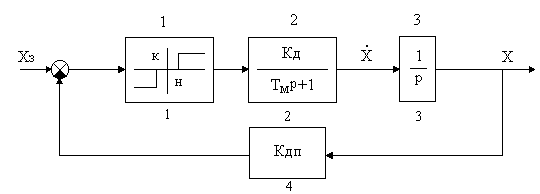
Рисунок 3 – Модель исполнительного устройства типа МЭО
Здесь ХЗ – задание на положение рабочего органа (задвижки). Это задание может быть выдано оператором или регулятором. Задание выдается в виде токового сигнала от 0 до 20 мА.
Параметрами
![]() и
и
![]() обозначены соответственно скорость
перемещения и перемещение рабочего
органа, которые могут измеряться в
относительных или абсолютных единицах
измерения.
обозначены соответственно скорость
перемещения и перемещение рабочего
органа, которые могут измеряться в
относительных или абсолютных единицах
измерения.
Звено 1 в структуре моделирует работу пускателя. Параметр Н – соответствует напряжению управления пускателя, а параметр К – напряжению питания двигателя (Н=0,01; К=0,1).
Звено 2 упрощенно моделирует сам электродвигатель в виде апериодического звена. Коэффициент КД связывает напряжение питания и частоту вращения вала МЭО.
Звено 3 моделирует переход от скорости перемещения рабочего органа к величине перемещения .
Звено 4 – датчик положения осуществляет преобразование параметра Х в соответствующий сигнал обратной связи.