

Глава 5. ДоплеровскИе измеритеЛи путевой скорости и угла сноса
5.1. Задачи, решаемые доплеровскими измерителями
При решении ряда основных навигационных задач широко применяются радионавигационные устройства, основанные на использовании эффекта Доплера. Эти РНУ получили название доплеровских и предназначены для определения составляющих вектора скорости ЛА относительно отражающей электромагнитные колебания поверхности и относятся к классу автономных РНУ, т.к. не требуют для образования канала измерения дополнительного наземного оборудования.
Вектор
полной скорости летательного аппарата
представляет собой сумму векторов
воздушной скорости летательного аппарата
![]() и скорости ветра
и скорости ветра
![]()
Вектор характеризует скорость перемещения воздушного судна относительно земной поверхности. В дальнейшем при описании ДИСС будем пользоваться прямоугольной системой координат, у которой ось Ox совпадает с продольной осью воздушного судна, ось Oz ей перпендикулярна, плоскость Oxz горизонтальна, а ось Oy перпендикулярна плоскости Oxz (рис. 5.1).
В общем случае все три вектора , , в этой системе координат могут иметь как горизонтальные, так и вертикальные составляющие. Обозначим буквами W, Vг, Uг соответственно проекции векторов полной скорости, воздушной скорости и скорости ветра на горизонтальную плоскость. Эти проекции в свою очередь образуют навигационный треугольник скоростей, для которого справедливо соотношение (рис. 5.1)
![]()
Горизонтальная
составляющая
вектора
полной скорости воздушного судна
получила название вектора путевой
скорости, ибо именно эта составляющая
учитывается при счислении пути,
пройденного воздушным судном вдоль
земной поверхности. В дальнейшем модуль
вектора
будем
называть путевой скоростью. Если
вертикальная составляющая
![]() полной
скорости равна нулю, то
=
.
полной
скорости равна нулю, то
=
.
В зависимости от количества составляющих вектора полной скорости летательного аппарата , измерение которых возможно в данном устройстве, различают доплеровские измерители вектора полной скорости и доплеровские измерители путевой скорости и угла сноса.
Доплеровские измерители вектора полной скорости применяют для управления полётом в вертикальной и горизонтальной плоскостях. Они применяются в основном на вертолетах. Некоторые типы таких измерителей обеспечивают также измерение истинной высоты полёта ВС.
Доплеровские
измерители путевой скорости и угла
сноса (ДИСС) обеспечивают измерение
вектора горизонтальной скорости ВС
или продольной
![]() и поперечной
и поперечной
![]() составляющих этого вектора. Они находят
наибольшее применение на самолётах,
где используются в качестве основного
датчика автономной навигационной
системы счисления пути.
составляющих этого вектора. Они находят
наибольшее применение на самолётах,
где используются в качестве основного
датчика автономной навигационной
системы счисления пути.
Доплеровские измерители работают в режиме излучения непрерывных или импульсных колебаний. Наибольшее распространение получил режим излучения непрерывных немодулированных или частотно-модулированных колебаний.
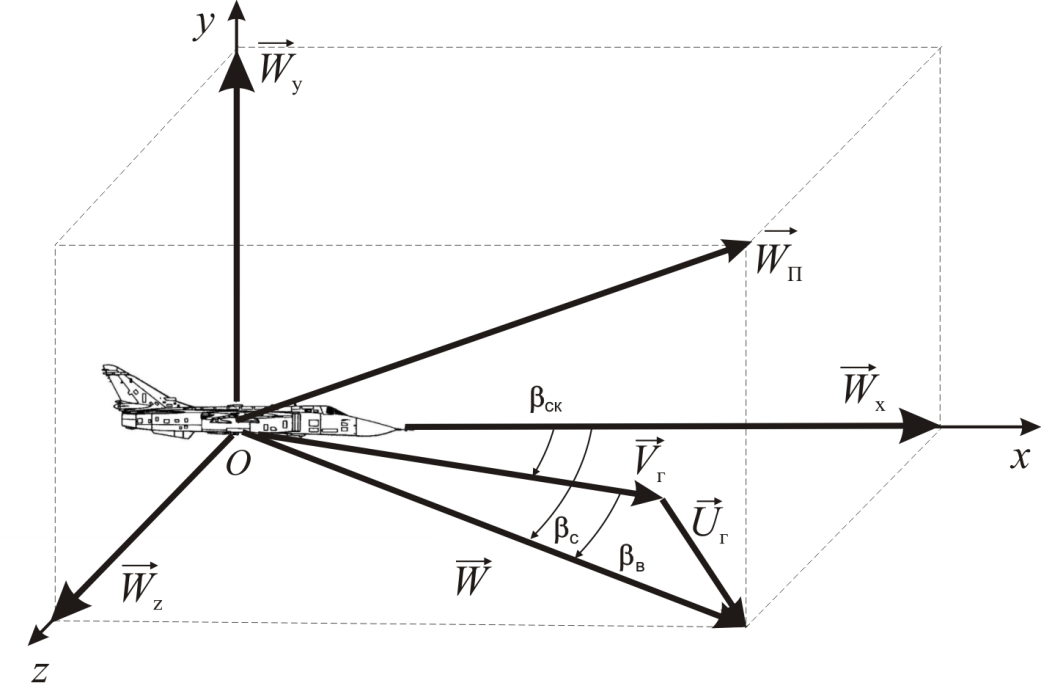
Рис. 5.1. Составляющие вектора скорости воздушного судна:
![]() ,
,
![]() ,
,
![]() – составляющие
вектора полной скорости
в горизонтальной системе координат;
вектор
путевой скорости;
– составляющие
вектора полной скорости
в горизонтальной системе координат;
вектор
путевой скорости;
![]() ,
,
![]()
горизонтальные составляющие вектора
воздушной скорости ВС и вектора скорости
ветра; с
– угол сноса; ск
– угол скольжения; в
– угол сноса ветром
горизонтальные составляющие вектора
воздушной скорости ВС и вектора скорости
ветра; с
– угол сноса; ск
– угол скольжения; в
– угол сноса ветром
В большинстве случаев ДИСС используются для решения навигационных задач в комплексе с аналоговым или цифровым навигационным вычислителем. При этом, в вычислитель дополнительно вводятся данные о воздушной скорости от датчика воздушной скорости и о курсе ВС от курсовой системы. Подобные комплексы аппаратуры (рис. 5.2) называются автономными доплеровскими навигационными системами.
В навигационный вычислитель заблаговременно вводят координаты контрольных пунктов маршрута (в том числе начального и конечного пунктов маршрута), значения заданных путевых углов и другие данные. На основе этих исходных данных, выходных данных доплеровского измерителя и других датчиков комплекса навигационный вычислитель решает следующие задачи: определяет курс следования на выбранный пункт маршрута; определяет текущие координаты ВС (географические или ортодромические); вычисляет поправки в курс; оставшееся расстояние и время полёта до выбранного пункта и т.п. Эта информация отображается на соответствующих указателях. При необходимости навигационный вычислитель может вырабатывать сигналы управления, подаваемые в автопилот для автоматического выдерживания ВС на линии заданного пути. В простейшем случае навигационный вычислитель выдает на соответствующие индикаторы значения путевой скорости и угла сноса.
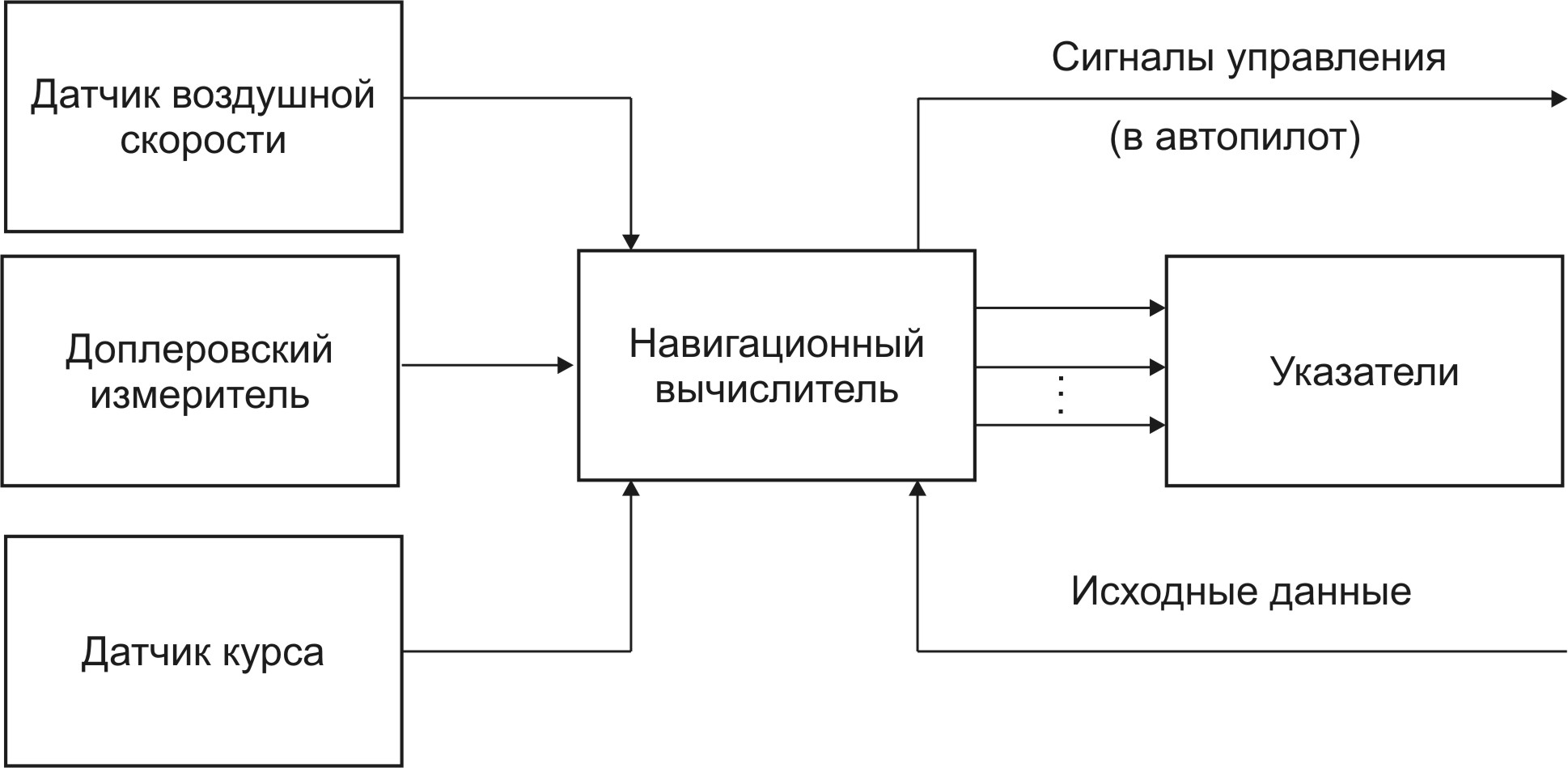
Рис. 5.2. Обобщенная структурная схема
автономной доплеровской навигационной системы
5.2. Сущность эффекта Доплера
В основу работы ДИСС положен факт, который заключается в изменении частоты колебаний принимаемых радиоволн при относительном движении передатчика и приемника. Это явление впервые было теоретически сформулировано австрийским физиком X. Доплером (1803-1853 г.г.) и подтвердилось экспериментально для звуковых колебаний. В области электромагнитных колебаний этот эффект был доказан русским физиком А.А. Белопольским в 1900 г.
Изменение частоты принимаемых колебаний тем больше, чем больше скорость движения приёмника относительно передатчика или, наоборот, передатчика относительно приёмника. Эффект Доплера также имеет место, если передатчик и приёмник неподвижны относительно друг друга и находятся на движущемся объекте, а колебания принимаются после их отражения от неподвижного объекта. Рассмотрим физическую сущность эффекта Доплера при непрерывном излучении радиоколебаний.
Пусть
на самолёте, перемещающемся в горизонтальной
плоскости со скоростью
![]() ,
установлена РЛС, излучающая электромагнитные
колебания на частоте f0
в направлении к земной поверхности
(рис. 5.3).
,
установлена РЛС, излучающая электромагнитные
колебания на частоте f0
в направлении к земной поверхности
(рис. 5.3).
Излучаемый сигнал передатчика описывается уравнением
uпрд(t) = U1sin(ω0t+φ0),
где U1 амплитуда излученных колебаний;
ω0=2f0 круговая частота;
φ0 начальная фаза колебаний.
З емная
поверхность отражает и рассеивает
высокочастотные колебания. Выделим на
отражающей поверхности точечный
отражатель С, находящийся на удалении
D под углом В,
измеряемом в вертикальной плоскости
между вектором путевой скорости и
направлением излучения.
емная
поверхность отражает и рассеивает
высокочастотные колебания. Выделим на
отражающей поверхности точечный
отражатель С, находящийся на удалении
D под углом В,
измеряемом в вертикальной плоскости
между вектором путевой скорости и
направлением излучения.
Колебания, принятые РЛС от этого отражателя, запаздывают относительно излучаемых колебаний на время tD = 2D/с, где D текущее значение расстояния между РЛС и единичным отражателем.
Принятые колебания представим в виде
uпрм(t) = U2sin [ω0(t-tD)+ φ0+ φц],
где U2 амплитуда принятых колебаний;
tD время запаздывания отраженного сигнала;
φц величина изменения фазы сигнала при отражении, которую будем считать постоянной.
Разность фаз принимаемых и излучаемых колебаний будет равна
![]() .
.
Принимая
во внимание, что частота есть производная
от изменения фазы по времени
![]() ,
найдем величину
изменения частоты принимаемых сигналов:
,
найдем величину
изменения частоты принимаемых сигналов:
![]() .
.
Из
этого выражения видно, что отраженные
колебания отличаются от излучаемых на
величину
![]() ,
которая и называется доплеровской
частотой. При приближении РЛС к единичному
отражателю
>0,
так как производная
,
которая и называется доплеровской
частотой. При приближении РЛС к единичному
отражателю
>0,
так как производная
![]() <0,
в этом случае доплеровской частоте
приписывается знак «плюс». При удалении
РЛС от единичного отражателя
<0,
так как производная
>0,
в этом случае доплеровской частоте
приписывается знак «минус».
<0,
в этом случае доплеровской частоте
приписывается знак «плюс». При удалении
РЛС от единичного отражателя
<0,
так как производная
>0,
в этом случае доплеровской частоте
приписывается знак «минус».
Учитывая, что величина является проекцией вектора путевой скорости на направление излучения Wr=WcosВ, получим формулу для расчета величины доплеровской частоты:
![]() .
(5.1)
.
(5.1)
Подставляя в полученную формулу скорость W в км/ч и длину волны λ0 в сантиметрах, получим
![]()
 .
.
Таким образом, при непрерывном излучении колебаний эффект Доплера для сигнала РЛС, отраженного от земной поверхности, проявляется в изменении частоты этого сигнала по отношению к частоте излучаемых колебаний на величину FД, прямо пропорциональную радиальной скорости РЛС относительно отражающей поверхности.
Доплеровское изменение частоты используется для измерения путевой скорости и угла сноса самолёта (рис. 5.4).
При постоянных величинах λ0 и В доплеровская частота зависит только от путевой скорости самолёта FД=f(W). Это справедливо для случая, когда отражатель лежит в одной плоскости с вектором путевой скорости (рис. 5.3).
В том случае, когда отражатель лежит в плоскости, составляющей с плоскостью курса угол Г, а самолёт выполняет полёт с путевой скоростью W и углом сноса с, величина доплеровской частоты составит (рис. 5.4)
![]() ,
(5.2)
,
(5.2)
где с угол сноса самолета; Г угол, характеризующий положение отражателя по азимуту.
Как следует из выражения (5.2) доплеровская частота становится максимальной при Г = с
![]() .
.
Следовательно, по углу разворота антенны Г относительно продольной оси самолёта, при котором доплеровская частота достигает максимума, можно судить о величине угла сноса с.
В общем случае доплеровская частота является функцией не только путевой скорости, но и угла сноса самолёта FД=f(W, с). Это обстоятельство и используется для определения путевой скорости и угла сноса.
5.3. Принцип действия ДИСС
Для измерения навигационных параметров в ДИСС используется эффект Доплера. С этой целью антенной системой ДИСС формируются совпадающие в пространстве передающая и приёмная диаграммы направленности, имеющие несколько (от 1 до 4) лучей. Эффект Доплера проявляется в изменении частоты принимаемых отраженных радиоколебаний относительно частоты излучаемых радиоколебаний. Разница этих частот называется доплеровской частотой или доплеровским сдвигом частоты
![]() ,
(5.3)
,
(5.3)
где
![]() ,
,
![]() частоты излучаемых
и принимаемых радиоколебаний,
частоты излучаемых
и принимаемых радиоколебаний,
![]()
длина волны излучаемых радиоколебаний,
c – скорость
распространения радиоволны; Wr
радиальная скорость,
т.е. составляющая скорости ВС в направлении
распространения электромагнитной
энергии (рис. 5.5).
длина волны излучаемых радиоколебаний,
c – скорость
распространения радиоволны; Wr
радиальная скорость,
т.е. составляющая скорости ВС в направлении
распространения электромагнитной
энергии (рис. 5.5).
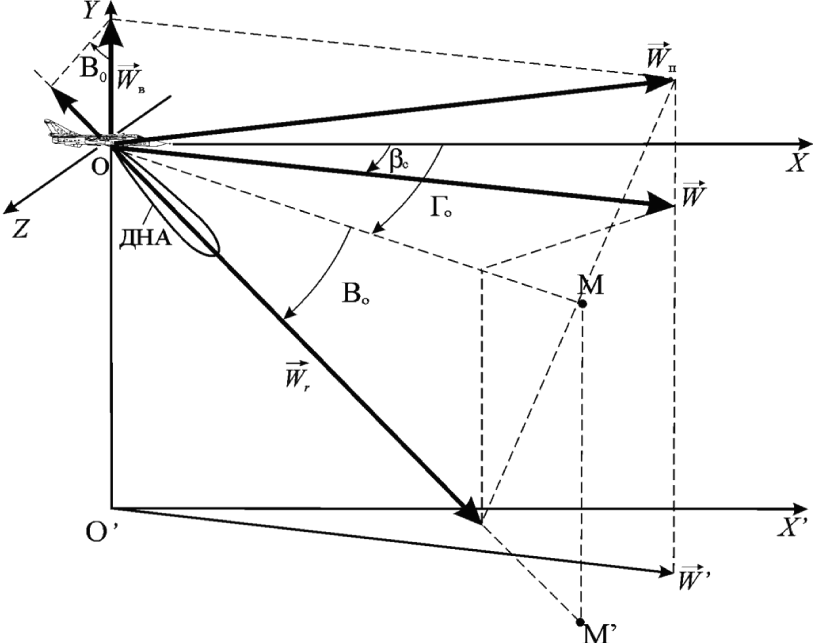
Рис. 5.5. К пояснению
принципа действия доплеровского
измерителя скорости
(![]()
проекция
на земную поверхность)
проекция
на земную поверхность)
Рассмотрим
простейший доплеровский измеритель,
антенна которого имеет диаграмму
направленности в виде одного узкого
луча, причем диаграмма направленности
на приём и диаграмма направленности на
передачу одинаковы. При пренебрежимо
малой ширине диаграммы направленности
(«игольчатая» диаграмма направленности)
радиальная скорость Wr
может быть определена как проекция
вектора полной скорости
![]() на ось диаграммы направленности антенны
(ДНА). Из рис. 5.5 видно, что
на ось диаграммы направленности антенны
(ДНА). Из рис. 5.5 видно, что
![]() (5.4)
(5.4)
где
![]()
путевая скорость,
путевая скорость,
![]() ,
,
![]()
установочные углы диаграммы направленности
в горизонтальной и вертикальной
плоскостях соответственно,
установочные углы диаграммы направленности
в горизонтальной и вертикальной
плоскостях соответственно,
![]()
вертикальная составляющая вектора
полной скорости,
вертикальная составляющая вектора
полной скорости,
![]() - угол сноса.
- угол сноса.
Подставляя выражение (5.4) в формулу (5.3) получим доплеровский сдвиг частоты, равный
![]() ,
(5.5)
,
(5.5)
Выражение
(5.5) является основным для ДИСС. Оно
свидетельствует, что информация о
навигационных параметрах заключена в
доплеровском сдвиге частоты. Из выражения
(5.5) также следует, что измерения
![]() в однолучевом ДИСС не дают возможности
определить навигационные параметры,
поскольку уравнение (5.5) содержит три
неизвестных
,
,
в однолучевом ДИСС не дают возможности
определить навигационные параметры,
поскольку уравнение (5.5) содержит три
неизвестных
,
,
![]() .
Однако, при горизонтальном полёте (
= 0), применяя поворотную антенную систему,
можно определить как путевую скорость,
так и угол сноса. При
= 0 из (5.5) следует
.
Однако, при горизонтальном полёте (
= 0), применяя поворотную антенную систему,
можно определить как путевую скорость,
так и угол сноса. При
= 0 из (5.5) следует
![]()
Очевидно,
что последнее выражение достигает
максимума при
![]() .
Поэтому, поворачивая антенну в
горизонтальной плоскости, необходимо
зафиксировать максимальное значение
доплеровского сдвига частоты, равное
.
Поэтому, поворачивая антенну в
горизонтальной плоскости, необходимо
зафиксировать максимальное значение
доплеровского сдвига частоты, равное
![]() (5.6)
(5.6)
При
этом установочный угол антенны в
горизонтальной плоскости равен углу
сноса
![]() .
.
По
измеренному значению
![]() ,
в соответствии с выражением (5.6),
определяется путевая скорость.
,
в соответствии с выражением (5.6),
определяется путевая скорость.
Однолучевой ДИСС не получил широкого применения из-за присущих ему недостатков:
сильного влияния вертикальной составляющей скорости на точность измерения, ограничивающего возможности ДИСС только измерениями в горизонтальном полете;
применения поворотных антенн, что усложняет и утяжеляет антенную систему;
высоких требований, предъявляемых к стабильности несущей частоты, так как любое изменение несущей частоты за время распространение сигнала по поверхности земли и обратно воспринимается ДИСС как дополнительный доплеровский сдвиг, следовательно, увеличивается ошибка измерения скорости.
В полной мере возможности ДИСС реализуется при числе лучей, равном трем или четырем.
5.4. Многолучевые доплеровские измерители
На
практике применяются многолучевые
ДИСС, антенные системы которых формируют
два, три или четыре луча. Двухлучевые
доплеровские измерители позволяют
определить путевую скорость
и угол сноса
![]() ,
либо определить продольную
,
либо определить продольную
![]() и поперечную
составляющие вектора полной скорости
летательного аппарата
.
Наибольшее распространение получили
системы лучей, показанные на рис. 5.6.
и поперечную
составляющие вектора полной скорости
летательного аппарата
.
Наибольшее распространение получили
системы лучей, показанные на рис. 5.6.
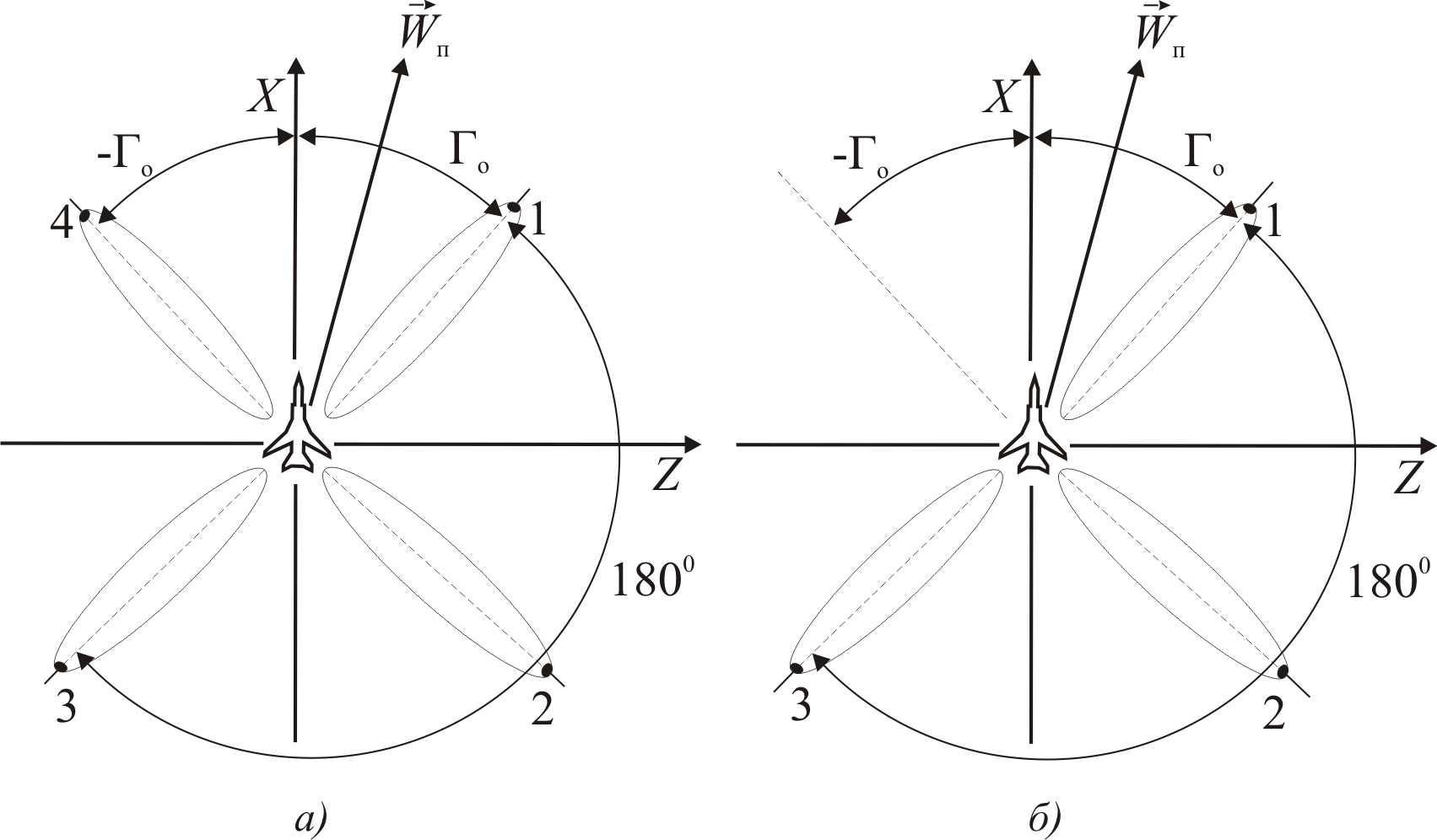
Рис. 5.6. Наиболее распространенные варианты расположения лучей в многолучевых ДИСС (проекция на горизонтальную плоскость):
а) четырёхлучевая X-система; б) трёхлучевая система
В
самолётных ДИСС все лучи имеют одинаковые
установочные углы
![]() в вертикальной плоскости и разные
установочные углы
в вертикальной плоскости и разные
установочные углы
![]() в горизонтальной плоскости. Обычно
в горизонтальной плоскости. Обычно
![]() ,
,
![]() ,
,
![]() .
Для ДИСС характерны следующие значения
установочных углов:
=
60…75,
=
15…45.
.
Для ДИСС характерны следующие значения
установочных углов:
=
60…75,
=
15…45.
Двухлучевые ДИСС в зависимости от ориентировки лучей антенны делятся на односторонние и двусторонние.
Односторонними называют такие измерители, у которых лучи антенны направлены в одну сторону от поперечной оси летательного аппарата, например, вперед, а двусторонними те, у которых лучи направлены в разные стороны от поперечной оси летательного аппарата (вперед и назад). С помощью односторонних двухлучевых ДИСС возможно точное измерение угла сноса, а с помощью двусторонних – путевой скорости. Ввиду того, что в двухлучевых ДИСС один из параметров (W или с) измеряется с большими ошибками, такие ДИСС не нашли практического применения.
Рассмотрим наиболее общий случай четырёхлучевого ДИСС. Выражения для доплеровских сдвигов частоты по каждому из лучей находятся из выражения (5.5) путем подстановки соответствующих установочных углов в горизонтальной плоскости:

![]()
![]()
![]() (5.7)
(5.7)
![]()
Из
выражения (5.7) следует, что в четырехлучевом
ДИСС имеется избыточность информации,
так как для определения всех трёх
навигационных параметров (W,
и
![]() )
достаточно трёх уравнений, а, следовательно,
и трёх лучей диаграммы направленности.
Однако четырехлучевой ДИСС позволяет
ослабить требования к стабильности
частоты излучаемых колебаний путем
реализации автокогерентного режима
работы, при котором доплеровский сдвиг
частоты выделяется при сравнении частот
сигналов, одновременно принимаемых по
двум лучам диаграммы направленности.
Так, например, при совместной обработке
сигналов по лучам 1 и 3, 2 и 4, выделяемые
доплеровские сдвиги в соответствии с
выражением (5.7) равны
)
достаточно трёх уравнений, а, следовательно,
и трёх лучей диаграммы направленности.
Однако четырехлучевой ДИСС позволяет
ослабить требования к стабильности
частоты излучаемых колебаний путем
реализации автокогерентного режима
работы, при котором доплеровский сдвиг
частоты выделяется при сравнении частот
сигналов, одновременно принимаемых по
двум лучам диаграммы направленности.
Так, например, при совместной обработке
сигналов по лучам 1 и 3, 2 и 4, выделяемые
доплеровские сдвиги в соответствии с
выражением (5.7) равны
![]()
![]()
Следовательно, вертикальная скорость исключается из результатов измерений, что снижает ее влияние на точность работы ДИСС. Однако, такие ДИСС не могут быть использованы для летательных аппаратов, где вертикальная скорость Wв является необходимым для управления навигационным параметром (например, вертолетов). Для определения всех трех составляющих вектора полной скорости Wп воздушного судна необходимо раздельно принимать и обрабатывать сигналы, принятые, по крайней мере, по каждому из трех лучей диаграммы направленности антенны.
Антенная система у многолучевых ДИСС обычно неподвижна, однако известны варианты четырёхлучевых ДИСС, продольная ось антенной системы которых автоматически устанавливаются по углу сноса.
Из
принципа действия однолучевого и
многолучевых ДИСС следует, что измерения
радиальных скоростей Wr,
а значит и доплеровских сдвигов частоты,
осуществляется в связанной с воздушным
судном системе координат. Поэтому, если
не принимать специальных мер при полете
с углами крена или тангажа не равными
нулю, возникает ошибка измерений
скорости. Так, ошибка задания вертикали
у однолучевого ДИСС равная
![]() ,
приводит к ошибке измерения путевой
скорости на 4,8 %. Для устранения таких
ошибок либо устанавливают антенну на
специальную гиростабилизированную
платформу, сохраняющую горизонтальное
положение при наличии крена или тангажа,
либо применяют нестабилизированные
(т.е. жестко закрепленные) антенны, а
поправки на крен и тангаж учитываются
с помощью вычислительного устройства,
в котором осуществляется перерасчет
из связанной в горизонтальную систему
координат. При этом углы крена или
тангажа поступают в вычислительное
устройство от гировертикали.
,
приводит к ошибке измерения путевой
скорости на 4,8 %. Для устранения таких
ошибок либо устанавливают антенну на
специальную гиростабилизированную
платформу, сохраняющую горизонтальное
положение при наличии крена или тангажа,
либо применяют нестабилизированные
(т.е. жестко закрепленные) антенны, а
поправки на крен и тангаж учитываются
с помощью вычислительного устройства,
в котором осуществляется перерасчет
из связанной в горизонтальную систему
координат. При этом углы крена или
тангажа поступают в вычислительное
устройство от гировертикали.
В соответствии с изложенным выше принципом действия можно предложить следующую обобщенную структурную схему доплеровского измерителя (рис. 5.7), входящего в состав автономной доплеровской навигационной системы.
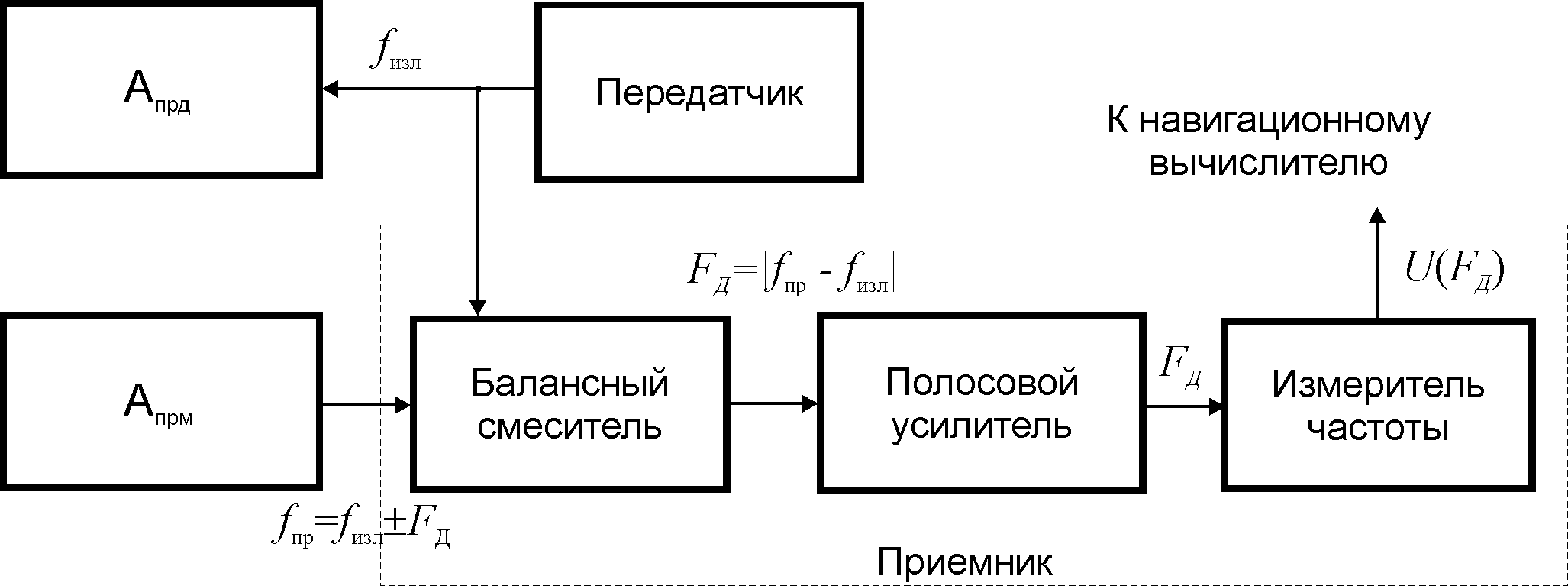
Рис. 5.7. Обобщенная структурная схема доплеровского измерителя
Передающая антенна Апрд излучает
колебания с частотой fизл
под заданными углами Г0 и В0.
Отраженные от земной поверхности
радиоколебания с частотой![]() поступают с приёмной антенны Апрм,
диаграмма направленности которой
идентична диаграмме направленности
передающей антенны, на балансный
смеситель. Сигнал на выходе балансного
смесителя имеет частоту, равную разности
частот сигналов на его входах
поступают с приёмной антенны Апрм,
диаграмма направленности которой
идентична диаграмме направленности
передающей антенны, на балансный
смеситель. Сигнал на выходе балансного
смесителя имеет частоту, равную разности
частот сигналов на его входах
![]() ,
т.е. частоту Доплера. Полученный сигнал
доплеровской частоты выделяется с
помощью полосового усилителя, имеющего
амплитудно-частотную характеристику,
перекрывающую диапазон возможных
значений доплеровского сдвига частоты
от
,
т.е. частоту Доплера. Полученный сигнал
доплеровской частоты выделяется с
помощью полосового усилителя, имеющего
амплитудно-частотную характеристику,
перекрывающую диапазон возможных
значений доплеровского сдвига частоты
от
![]() до
до
![]() (рис. 5.8). Применение полосового усилителя
ослабляет действие помех, не попадающих
в его полосу пропускания. В измерителе
частоты формируется сигнал, несущий
информацию о Fд,
например, напряжение U(Fд),
пропорциональное доплеровскому
сдвигу частоты. Этот сигнал вместе с
сигналами, соответствующими доплеровским
частотам по другим лучам антенной
системы, поступает в навигационный
вычислитель, где определяются необходимые
навигационные параметры: путевая
скорость, угол сноса и т.д.
(рис. 5.8). Применение полосового усилителя
ослабляет действие помех, не попадающих
в его полосу пропускания. В измерителе
частоты формируется сигнал, несущий
информацию о Fд,
например, напряжение U(Fд),
пропорциональное доплеровскому
сдвигу частоты. Этот сигнал вместе с
сигналами, соответствующими доплеровским
частотам по другим лучам антенной
системы, поступает в навигационный
вычислитель, где определяются необходимые
навигационные параметры: путевая
скорость, угол сноса и т.д.
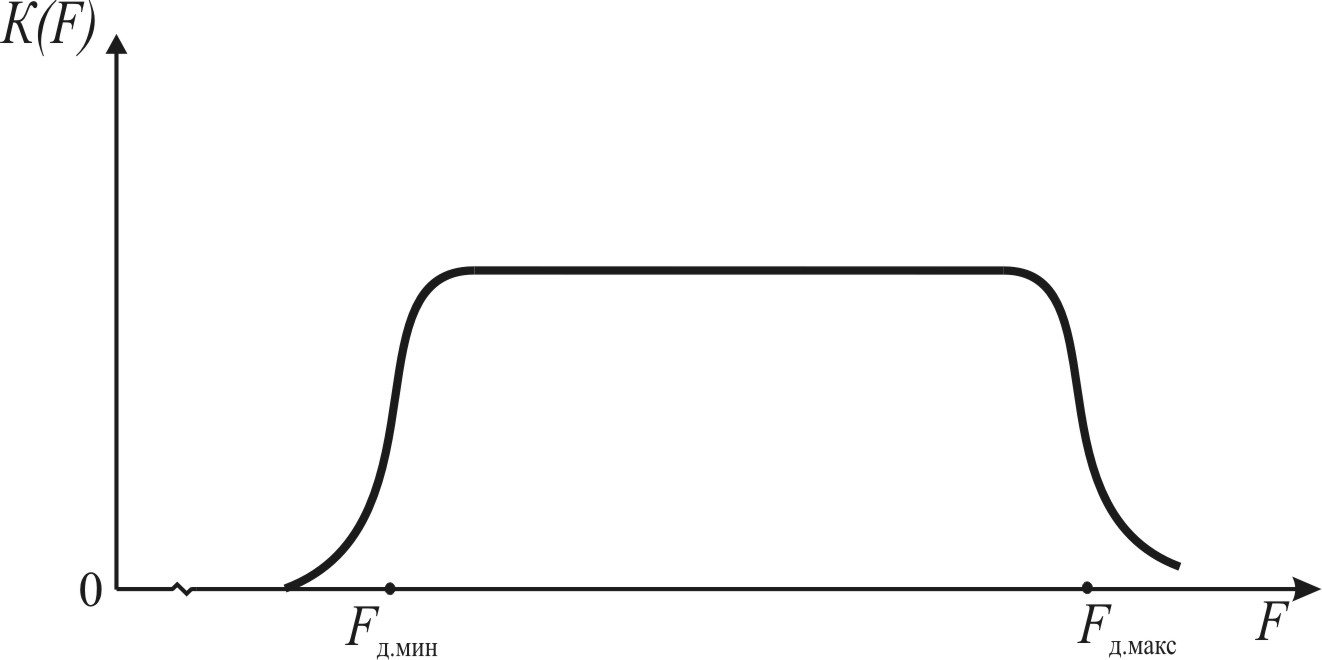
Рис. 5.8. Амплитудно-частотная характеристика полосового усилителя
В многолучевых ДИСС либо применяют многоканальные схемы, каждая из которых идентична схеме, показанной на рис. 5.7, либо подключают один канал последовательно к разным входам (выходам) антенн и навигационного вычислителя.
5.5. Спектр доплеровского сигнала
При изложении принципа действия ДИСС указывалось, что доплеровская частота имеет определенное значение Fд, пропорциональное радиальной скорости Wr. Однако, такое предположение справедливо только в том случае, если бы антенна ДИСС создавала бесконечно узкие лучи, и отражение происходило бы от одной точки земной поверхности. На самом же деле антенная система ДИСС формирует лепестки конечной ширины. Отражение излученной энергии в каждый момент времени происходит от бесконечного множества элементарных отражателей, находящихся в пределах облучаемого участка на земной поверхности. Из рис. 5.9а видно, что направление на каждый элементарный отражатель, находящийся в пределах облучаемого участка земной поверхности, определяется следующими углами: в вертикальной плоскости – от Bмин до Bмакс, в горизонтальной плоскости от Гмин до Гмакс. Установочные углы B0 и Г0 определяют направление максимума диаграммы направленности.
Так
как элементарные отражатели находятся
под разными углами
![]() и
и
![]() к строительной оси самолёта, то, в
соответствии с выражением (5.5), доплеровские
частоты
к строительной оси самолёта, то, в
соответствии с выражением (5.5), доплеровские
частоты
![]() сигналов, отраженных от элементарных
отражателей, отличаются от частоты
сигналов, отраженных от элементарных
отражателей, отличаются от частоты
![]() ,
соответствующей оси диаграммы
направленности антенны и характера
отражающей поверхности.
,
соответствующей оси диаграммы
направленности антенны и характера
отражающей поверхности.
Рис. 5.9. Формирование
спектра доплеровского сигнала: а)
диаграмма направленности антенны ДИСС;
б) зависимость коэффициента отражения
kотр
от угла падения пад
электромагнитной волны для земной и
водной поверхности; в) спектр
доплеровского сигнала для земной и
водной поверхности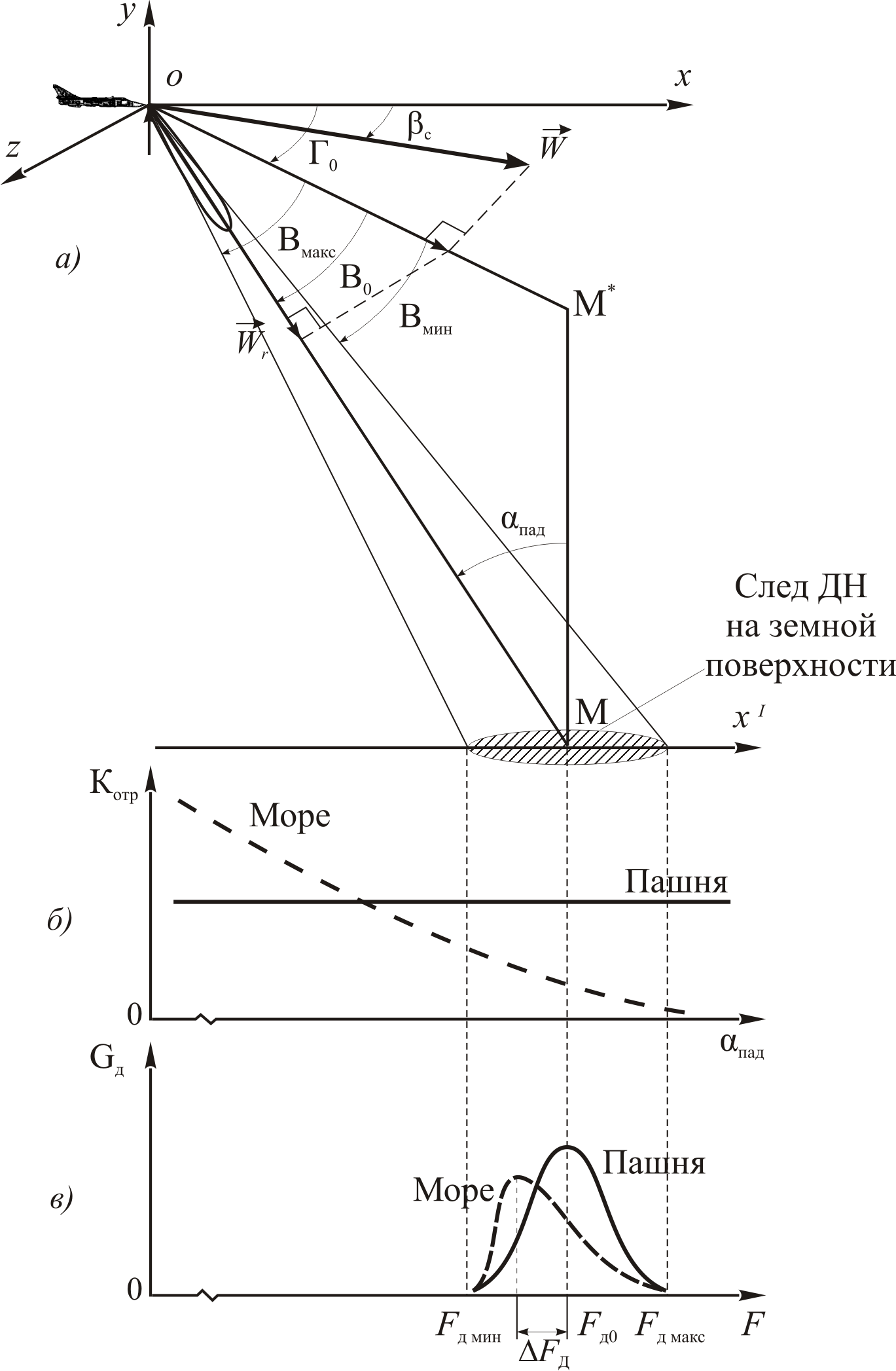
Принимаемый
сигнал представляет себе сумму сигналов
от элементарных отражателей и поэтому
содержит спектральные составляющие с
частотами от
до
(рис.
5.9в). Причем, если коэффициент отражения
![]() не
зависит от угла падения (рис. 5.9б –
пашня), то огибающая спектра повторяет
форму диаграммы направленности (рис.
5.9в – пашня). Если же коэффициент отражения
зависит от угла падения, что характерно
для спокойной водной поверхности (рис.
5.9б – море), то в пределах ширины луча
антенны происходит искажение спектра
отраженных сигналов, в нем увеличивается
мощность низких частот и уменьшается
мощность высоких. В результате этого
смещается максимум мощности в спектре
отраженного сигнала в сторону нижних
частот, а, следовательно, и средняя
доплеровская частота спектра
(рис. 5.9б – море).
не
зависит от угла падения (рис. 5.9б –
пашня), то огибающая спектра повторяет
форму диаграммы направленности (рис.
5.9в – пашня). Если же коэффициент отражения
зависит от угла падения, что характерно
для спокойной водной поверхности (рис.
5.9б – море), то в пределах ширины луча
антенны происходит искажение спектра
отраженных сигналов, в нем увеличивается
мощность низких частот и уменьшается
мощность высоких. В результате этого
смещается максимум мощности в спектре
отраженного сигнала в сторону нижних
частот, а, следовательно, и средняя
доплеровская частота спектра
(рис. 5.9б – море).
При измерении скорости летательного аппарата с помощью ДИСС необходимо с высокой точностью измерить значение средней частоты спектра доплеровского сигнала . Величина смещения FД меняется в пределах от 0 до 3 % в зависимости от характера отражающей поверхности, что дает ошибку в измерении путевой скорости.
По характеру излучения доплеровские измерители можно разделить на две группы. К первой группе относят измерители с непрерывным режимом излучения, к второй – с импульсным.
При непрерывном режиме излучения используются или немодулированные незатухающие колебания, или модулированные по частоте колебания. В соответствии с этим различают ДИСС с излучением непрерывных частотно-модулированных колебаний. ДИСС с импульсным режимом излучения могут быть когерентными и некогерентными.
Рассмотрим особенности работы различных разновидностей ДИСС.
5.6. Особенности работы ДИСС с излучением непрерывных немодулированных колебаний
Основными
достоинствами рассматриваемых ДИСС
(ДИСС НМ) являются относительная простота
приёмо-передающего тракта и использование
практически всей энергии полезного
сигнала, так как его спектр сосредоточен
на частоте
![]() ,
где
доплеровский сдвиг по i-му
лучу диаграммы направленности.
,
где
доплеровский сдвиг по i-му
лучу диаграммы направленности.
Основным недостатком ДИСС НМ является сравнительно большой уровень шумов на входе приёмника из-за паразитной модуляции просачивающихся на вход приёмника прямых колебаний передатчика. Паразитная модуляция этих колебаний по амплитуде и фазе происходит за счет отражения излучаемых сигналов от вибрирующих элементов конструкции летательного аппарата, обтекателя антенн, от турбулентностей воздушной среды и т.д. Это приводит к уменьшению отношения сигнал шум и, следовательно, к уменьшению чувствительности приёмника. Для уменьшения влияния прямого сигнала передатчика в ДИСС НМ используют отдельные приемную и передающую антенны, что обеспечивает развязку между прямым и отраженным сигналом не менее 70 дБ (107 раз по мощности), добиваются жесткости конструкции антенно-фидерного и приемо-передающего трактов, а также рационально выбирают место установки антенны.
Наиболее широкое распространение получили ДИСС НМ с двойным преобразованием частоты. Возможно построение ДИСС НМ с обработкой сигналов либо в общем для всех лучей приёмном тракте, либо в отдельных трактах для каждого из лучей. Рассмотрим работу ДИСС НМ на примере ДИСС НМ с общим приемным трактом (рис. 5.10).
Возможность совместной обработки сигналов в одном приемном тракте обеспечивается с помощью коммутаторов, управляющие сигналы на которое время подаются от устройства управления. Коммутаторы 1 и 2 служат для переключения лучей диаграммы направленности, при этом формируются два луча, например, 1 и 3 или 4 и 2 (см. рис. 5.6). Принятые сигналы от двух лучей поступают на балансный смеситель 1. Так как лучи размещаются симметрично, то при горизонтальном полете доплеровские сдвиги одинаковы по модулю, но имеют разный знак:
![]()

Рис. 5.10. Принцип построения ДИСС НМ:
а) упрощенная структурная схема ДИСС НМ; б) спектры сигналов в ДИСС НМ (1, 2, 3, 4 – номера лучей, - угол тангажа)
Поэтому спектр принимаемого сигнала Gпрм (рис. 5.10б) симметричен относительно несущей частоты fн.
На
второй вход балансного смесителя 1
поступает напряжение гетеродина с
частотой
![]() .
С помощью балансного смесителя
осуществляется перенос спектра сигнала
с несущей частоты fн
на промежуточную fпр.
Преобразованные сигналы с частотами
.
С помощью балансного смесителя
осуществляется перенос спектра сигнала
с несущей частоты fн
на промежуточную fпр.
Преобразованные сигналы с частотами
![]() после усиления в усилителе промежуточной
частоты (УПЧ) подвергаются второму
преобразованию частоты в балансном
смесителе 3. При этом в качестве напряжения
гетеродина используется напряжение с
балансного смесителя 2, имеющее частоту
fпр. На выходе
балансного смесителя 3 происходит
сложение спектров сигналов обоих лучей.
При отсутствии тангажа спектр Gпрм
симметричен относительно fн,
поэтому оба спектра после преобразования
совпадают (сплошные линии на рис. 5.10).
При наличии тангажа (
после усиления в усилителе промежуточной
частоты (УПЧ) подвергаются второму
преобразованию частоты в балансном
смесителе 3. При этом в качестве напряжения
гетеродина используется напряжение с
балансного смесителя 2, имеющее частоту
fпр. На выходе
балансного смесителя 3 происходит
сложение спектров сигналов обоих лучей.
При отсутствии тангажа спектр Gпрм
симметричен относительно fн,
поэтому оба спектра после преобразования
совпадают (сплошные линии на рис. 5.10).
При наличии тангажа (![]() )
доплеровские сдвиги частоты в каждой
паре лучей получают одинаковые приращения
Fд
и Gпрм становится
несимметричен относительно fн.
Однако после преобразования в балансном
смесителе 3 спектры сигналов лучей 1 и
3 или 2 и 4 смещаются в разные стороны
относительно Fд
на одну и ту же величину Fд,
поэтому средняя частота спектра
практически не изменяется (штриховые
линии на рис. 5.10) и ошибка измерения
увеличивается несущественно.
)
доплеровские сдвиги частоты в каждой
паре лучей получают одинаковые приращения
Fд
и Gпрм становится
несимметричен относительно fн.
Однако после преобразования в балансном
смесителе 3 спектры сигналов лучей 1 и
3 или 2 и 4 смещаются в разные стороны
относительно Fд
на одну и ту же величину Fд,
поэтому средняя частота спектра
практически не изменяется (штриховые
линии на рис. 5.10) и ошибка измерения
увеличивается несущественно.
Полосовой усилитель выделяет сигнал доплеровской частоты Fд, которая затем измеряется в измерителе частоты. С помощью коммутатора 3 напряжения, пропорциональные доплеровским сдвигам частоты по лучам 1, 3 и 2, 4 разделяются на два разных выхода и выдаются в навигационный вычислитель, в котором они используются для определения скорости, угла сноса и других навигационных параметров.
Как следует из принципа действия, при совместной обработке сигналов разных лучей теряется информация о знаке доплеровского сдвига частоты, что не имеет большого значения в самолётных ДИСС, однако оказывается существенным для вертолётных ДИСС, в которых применяются специальные схемы обработки, сохраняющие знак.
Доплеровские измерители с раздельными приёмными каналами отличаются повышенной надежностью за счет исключения коммутаторов (особенно высокочастотных) и позволяют упростить волноводный тракт. Это достигается за счет усложнения схемы обработки сигнала – требуется несколько (по числу лучей) идентичных каналов (выделен штриховой линией на рис. 5.10а).
5.7. Особенности работы ДИСС с частотной модуляцией сигналов
Доплеровские измерители с частотной модуляцией (ДИСС ЧМ) позволяют уменьшить влияние прямого сигнала на приёмный тракт ценой ухудшения энергетических соотношений (требуется увеличение мощности передатчика) и усложнения схемы.
При частотной модуляции несущая частота излучаемого (прямого) сигнала изменяется обычно по гармоническому закону (рис. 5.11).
Закон изменения частоты отраженного сигнала такой, как и излучаемого, однако отраженный сигнал задержан относительно излучаемого на время tD, пропорциональное наклонной дальности D до земной поверхности. Поэтому, как видно из рис. 5.11, отраженный и прямой сигналы существенно различаются по частоте. Благодаря этому различию их спектры могут быть разделены с помощью методов частотной селекции. В результате уменьшается влияние прямого сигнала на приемный тракт и на 20…25 дБ снижаются требования к развязке передающего и приемного трактов по сравнению с ДИСС НМ.
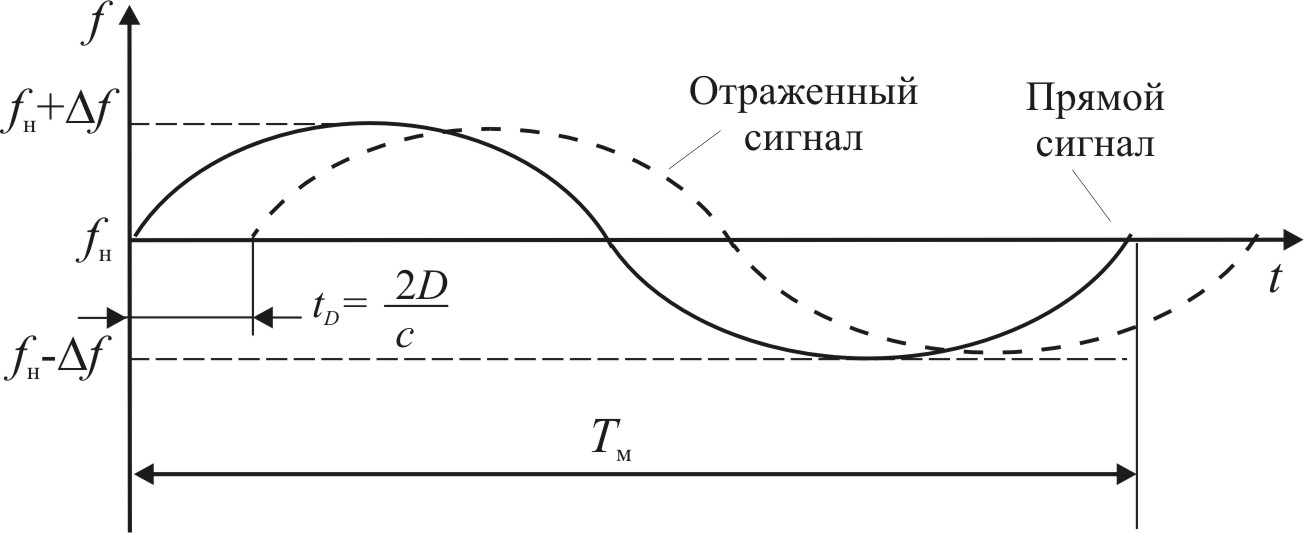
Рис. 5.11. Закон изменения частоты прямого и отраженного сигналов (Tм – период модуляции)
Спектр
излучаемого частотно-модулированного
сигнала показан на рис. 5.12. Параметры
модулирующего сигнала выбираются таким
образом, чтобы получить максимальную
амплитуду третьей гармоники
![]() .
Отраженный сигнал на входе приёмника
имеет спектр, представленный на
рис. 5.12б. Причем доплеровские спектры
формируются каждой спектральной
составляющей
.
Отраженный сигнал на входе приёмника
имеет спектр, представленный на
рис. 5.12б. Причем доплеровские спектры
формируются каждой спектральной
составляющей
![]() ,
k = 1, 2,.… Частота
модуляции Fм
соответствует максимально возможной
частоте Доплера
(рис. 5.12б)
,
k = 1, 2,.… Частота
модуляции Fм
соответствует максимально возможной
частоте Доплера
(рис. 5.12б)
![]() (5.8)
(5.8)
Это обеспечивает однозначность измерения
для максимально возможной скорости
летательного аппарата. Из рис. 5.12б видно,
что при выборе
![]() в соответствии с выражением (5.8)
доплеровские спектры от соседних
гармоник не перекрываются. Обычно
выбираются в пределах сотни килогерц
– единицы мегагерц.
в соответствии с выражением (5.8)
доплеровские спектры от соседних
гармоник не перекрываются. Обычно
выбираются в пределах сотни килогерц
– единицы мегагерц.
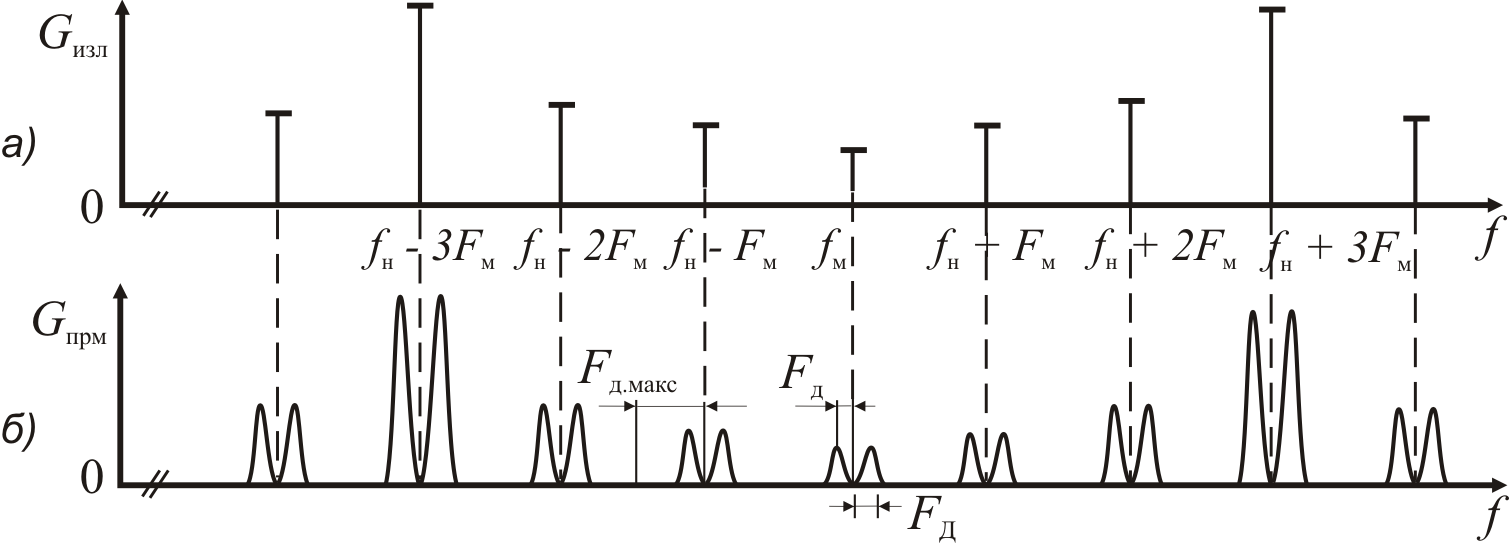
Рис. 5.12. Спектры излучаемого (а) и принимаемого (б) сигналов в ДИСС ЧМ (1, 2, 3, 4 – номера лучей)
Принимаемый сигнал в ДИСС ЧМ преобразуется сразу на нулевую несущую частоту, при этом реализуется операция получения разностной частоты Fр, равной
Fр = fпрм - fизл.
(В ДИСС НМ вместо fизл использовалась частота гетеродина fг < fизл). Преобразованию подвергается как полезный сигнал, отраженный от земли, так и прямой сигнал (помеховый), образующийся, в основном, за счет отражения от элементов конструкции самолета (рис. 5.13).
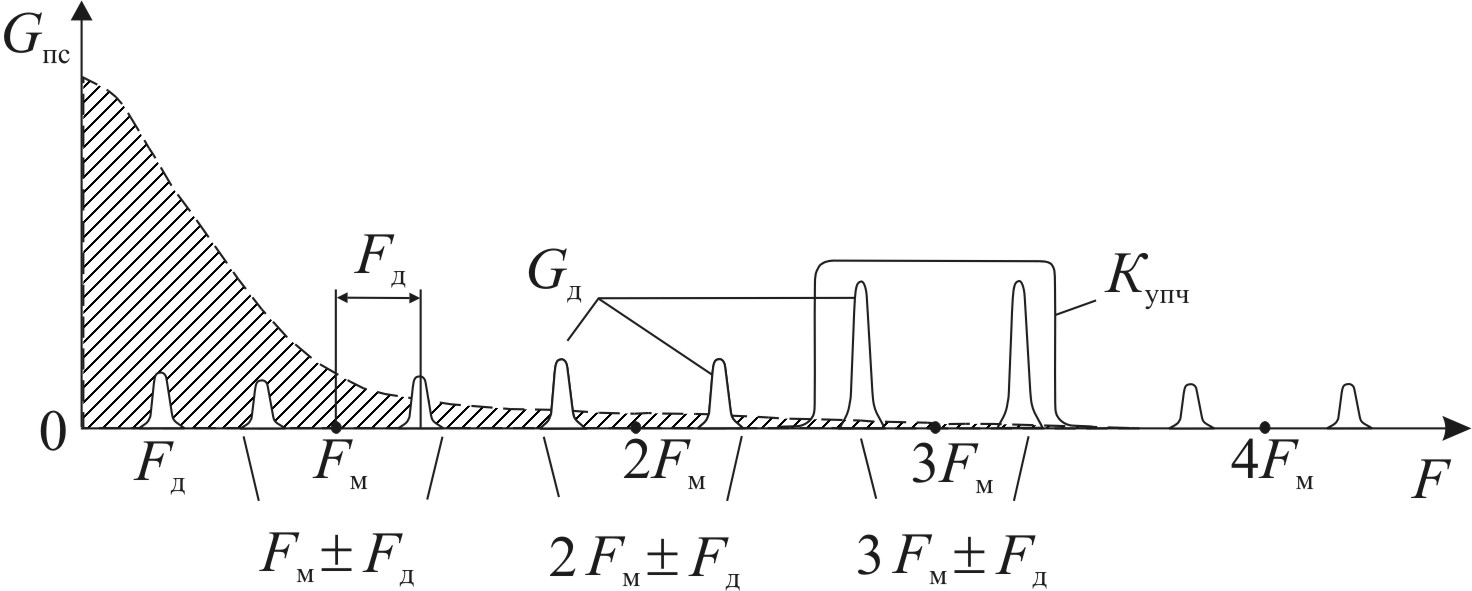
Рис. 5.13. Спектры преобразованных сигналов и АЧХ УПЧ (Купч):
Gпс – спектр прямого сигнала (заштрихован); Gд – доплеровский спектр
Можно
показать, что спектр прямого сигнала
Gпс концентрируется
около нулевой частоты и практически
отсутствует в области третьей гармоники
![]() .
В то же время, доплеровские спектры Gд,
образуемые третьей гармоникой излучаемого
сигнала, максимальны. Поэтому в ДИСС ЧМ
преобразованный сигнал подвергается
фильтрации в усилителе промежуточной
частоты (УПЧ), настроенном на третью
гармонику модулирующего сигнала и
имеющем полосу пропускания, перекрывающую
диапазон возможных изменений частоты
Доплера (рис. 5.13). В результате помеха,
вызванная влиянием прямого сигнала,
оказывается значительно ослабленной,
что существенно снижает требования к
развязке передающего и приёмного
трактов. Однако, наряду с ослаблением
помехи в ДИСС ЧМ, как видно из рис. 5.13,
происходит ослабление полезного сигнала,
так как УПЧ пропускает только доплеровские
спектры, образуемые третьей гармоникой.
Именно по этой причине в ДИСС ЧМ требуется
мощность передатчика более высокая,
чем в ДИСС НМ.
.
В то же время, доплеровские спектры Gд,
образуемые третьей гармоникой излучаемого
сигнала, максимальны. Поэтому в ДИСС ЧМ
преобразованный сигнал подвергается
фильтрации в усилителе промежуточной
частоты (УПЧ), настроенном на третью
гармонику модулирующего сигнала и
имеющем полосу пропускания, перекрывающую
диапазон возможных изменений частоты
Доплера (рис. 5.13). В результате помеха,
вызванная влиянием прямого сигнала,
оказывается значительно ослабленной,
что существенно снижает требования к
развязке передающего и приёмного
трактов. Однако, наряду с ослаблением
помехи в ДИСС ЧМ, как видно из рис. 5.13,
происходит ослабление полезного сигнала,
так как УПЧ пропускает только доплеровские
спектры, образуемые третьей гармоникой.
Именно по этой причине в ДИСС ЧМ требуется
мощность передатчика более высокая,
чем в ДИСС НМ.
После
фильтрации в УПЧ обработка доплеровского
сигнала в ДИСС ЧМ происходит так же, как
в ДИСС НМ: он преобразуется с частоты
![]() на нулевую частоту, фильтруется в
полосовом усилителе и подается на
измеритель частоты (см. рис. 5.10а). Далее
измеренные доплеровские частоты
используются в навигационном вычислителе
для определения навигационных параметров.
на нулевую частоту, фильтруется в
полосовом усилителе и подается на
измеритель частоты (см. рис. 5.10а). Далее
измеренные доплеровские частоты
используются в навигационном вычислителе
для определения навигационных параметров.
Еще одним недостатком ДИСС ЧМ является наличие «слепых» высот. Это такие высоты, при полёте на которых спектр полезного преобразованного сигнала в области третьей гармоники отсутствует. «Слепые» высоты соответствуют задержке отраженного сигнала кратной периоду модуляции Tм
![]() ,
k = 1, 2, 3 … (5.9)
,
k = 1, 2, 3 … (5.9)
Из рис. 5.11 видно, что при таких условиях прямой и отраженный сигналы совпадают. В результате спектр преобразованного отраженного сигнала на «слепых» высотах, как и спектр преобразованного прямого сигнала, концентрируется вблизи нулевой частоты. Например, при частоте модуляции Fм=1 МГц и установочном угле в вертикальной плоскости B0=65 величина Hсл=45,3 м; 90,6 м; 135,9 м и т.д. Эффективным способом борьбы со «слепыми» высотами является изменение частоты модуляции Fм (в пределах ± 0,2Fм) – вобуляция частоты, – с периодом, равным периоду коммутации лучей ДИСС ЧМ. Так как время задержки tD отраженного сигнала меняется значительно медленнее, чем частота модуляции Fм, то условие (5.9) будет выполняться кратковременно и перебоев в поступлении доплеровской информации практически не будет.
5.8. Особенности работы ДИСС с импульсным режимом излучения
Особенностью ДИСС с излучением импульсно-модулированных колебаний (ДИСС ИМ) является использование общей приемо-передающей антенны. Приемник в ДИСС ИМ во время излучения импульсов передатчика запирается, благодаря чему полностью исключается влияние прямого сигнала на приемный тракт.
Спектры излучаемого (прямого) сигнала Gпс и принимаемого (доплеровского) сигнала Gд представлены на рис. 5.14. Доплеровский спектр на рис. 5.14б показан для одного луча диаграммы направленности антенны. Спектры соответствуют излучению импульсов со скважностью
![]()
где
![]() период следования
импульсов, и
длительность
импульсов (рис. 5.15).
период следования
импульсов, и
длительность
импульсов (рис. 5.15).

Рис. 5.14. Спектры сигналов в ДИСС ИМ (скважность q = 2):
а) спектр излучаемых колебаний; б) спектр принимаемых колебаний
Для измерения доплеровского сдвига Fд используется наиболее мощная составляющая спектра принимаемого сигнала, которая образуется спектральной составляющей излучаемого сигнала, имеющей частоту fн (несущая частота). Так как в ДИСС ИМ используется только одна составляющая доплеровского спектра, соответствующая несущей частоте, то есть имеются потери полезного сигнала, то энергетические характеристики ДИСС ИМ хуже, чем ДИСС НМ.
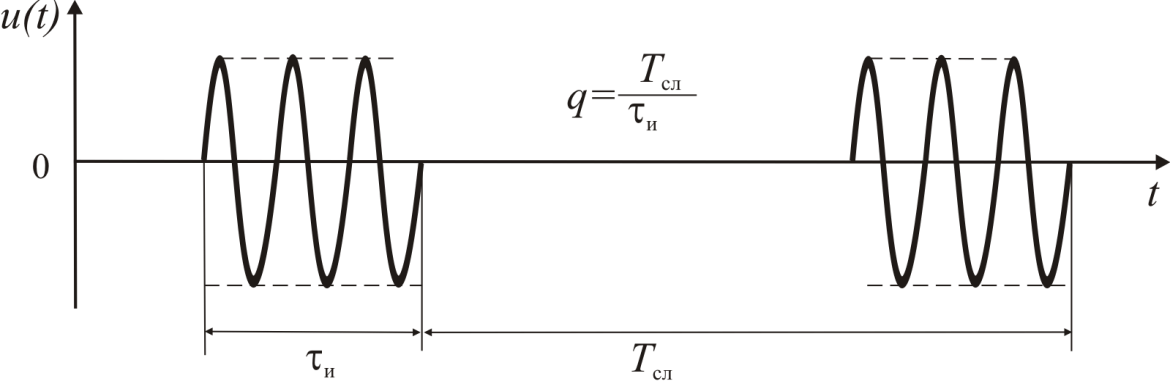
Рис. 5.15. Вид сигнала, излучаемого ДИСС ИМ
Ещё одним недостатком ДИСС ИМ является наличие «слепых» высот, соответствующих тем высотам полета, на которых отраженные сигналы приходят к приемнику ДИСС в моменты, когда последний запрет на время излучения передатчиком очередного импульса. Для уменьшения влияния «слепых» высот на характеристики ДИСС ИМ применяется вобуляция частоты следования импульсов, при этом пропадание доплеровского сигнала происходит кратковременно и не влияет на работу ДИСС.
В зависимости от способа выделения доплеровского сигнала различают когерентные и автокогерентные ДИСС ИМ.
Когерентные ДИСС ИМ обеспечивают выделение частоты Доплера путем сравнения частоты принимаемого сигнала с частотой непрерывно работающего задающего генератора передатчика. Когерентность обработки сигнала позволяет определить знак доплеровской частоты. Автокогерентные ДИСС ИМ (с внешней когерентностью) обеспечивают выделение частоты Доплера путем сравнения сигналов, принятых одновременно по двум лучам диаграммы направленности (1; 3 или 4; 2). Как указывалось ранее, при такой обработке теряется информация о вертикальной скорости и о знаке частоты Доплера. В целом автокогерентные ДИСС ИМ обладают худшими характеристиками, чем ДИСС других типов.
5.9. Факторы, влияющие на высотность и точность ДИСС
Высотность ДИСС определяется минимальной и максимальной рабочей высотой.
Минимальная высота Hмин, на которой можно получить информацию о ДИСС, зависит от вида излучаемого сигнала и от степени влияния слепых высот. Высота Hмин практически не ограничена у ДИСС НМ и зависит от длительности излучаемого импульса у ДИСС ИМ, так как приёмник ДИСС ИМ заперт на время излучения импульса.
В ДИСС ЧМ, вследствие периодического характера модуляции имеются «слепые» высоты. При полете вблизи «слепых» высот происходит значительное ослабление преобразованного сигнала (на несколько десятков дБ) и искажение его спектра. Этот эффект проявляется при полётах на малых высотах и уменьшается с увеличением высоты полета. Поэтому минимальные рабочие высоты в ДИСС ЧМ ограничиваются теми значениями, при которых «слепые высоты» практически не влияют на характеристики ДИСС. Как указывалось ранее, для ослабления влияния «слепых» высот применяют вобуляцию (изменение) частоты модуляции.
Максимальная рабочая высота Hмакс в ДИСС НМ ограничивается, в основном, влиянием прямого сигнала. Улучшение развязки передающего и приемного трактов позволяет уменьшить помехи от прямого сигнала и увеличить, благодаря этому, максимальную рабочую высоту.
Существенное влияние на величину Hмакс оказывает коэффициент обратного рассеяния (коэффициент отражения) Kотр подстилающей поверхности и установочный угол в вертикальной плоскости В0. Первый из этих факторов сказывается при полетах над водной поверхностью (морем), когда возможно уменьшение отраженного сигнала на 25…30 дБ, особенно при малом волнении моря. Возникающие в этом случае перерывы в поступлении доплеровской информации нарушают работу ДИСС. Для исключения больших ошибок измерения навигационных параметров при кратковременном пропадании отраженного сигнала (до нескольких секунд) используется режим «Память». В этот режим ДИСС переходит автоматически при ослаблении отраженного сигнала в каком-либо из приемных каналов ниже допустимого уровня. В режиме «Память» запрещается прохождение недостоверной доплеровской информации в измеритель частоты, запоминаются и используются для вычислений последние измеренные значения скорости и угла сноса.
Изменение углового положения самолёта при крене или тангаже приводит к изменению угла падения радиоволны на подстилающую поверхность. При этом увеличение угла падения эквивалентно уменьшению В0 (см. рис. 5.7а), что вызывает ослабление обратного сигнала, а, следовательно, и уменьшение Нмакс.
В современных ДИСС НМ Нмакс достигает 25 км. В других типах ДИСС вследствие энергетических потерь при обработке сигналов величина Нмакс уменьшается.
На точность измерения навигационных параметров в ДИСС оказывают влияние много различных факторов: нестабильность несущей частоты (изменение несущей частоты на величину ΔF приводит к соответствующей ошибке измерения частоты Доплера); неточность установочного угла (при В0=70 и погрешности ΔВ0=1 относительная погрешность измерения путевой скорости достигает 0,08% в случае обработки сигналов по каждому лучу отдельно и в два раза меньше при совместном использовании информации от двух диаметрально расположенных лучей). Основное влияние на точность ДИСС оказывает неточность измерения частоты Доплера, которая определяется точностью самого измерителя частоты и методическими погрешностями. Методические погрешности обусловлены в основном формированием доплеровского сигнала при отражении от подстилающей поверхности. Расширение спектра доплеровского сигнала приводит к уменьшению точности измерений.
Другой характерной для ДИСС составляющей методической погрешности, вызванной указанным фактором, является погрешность смещения, особенно заметная при переходе от полета над сушей к полету над морем (см. рис. 5.9в) и наоборот. Эта погрешность обусловлена смещением максимума огибающей спектра в сторону более низких частот и приводит к ошибкам измерения скорости, достигающим 9 %. Наиболее часто применяется коррекция погрешности смещения с помощью поправки, значение которой соответствует некоторому среднему значению коэффициента отражения (среднему волнения моря). Таким образом удается снизить величину погрешности измерения скорости за счет погрешности смещения до 0,3…0,7 %. Поправка вводится при пролёте береговой черты с помощью переключателя суша-море.
Заключение
В области авиационных радиоэлектронных систем, как и в любой другой области техники, происходит непрерывный процесс обновления, замены устаревших новыми модификациями. Расширяются и усложняются решаемые ими задачи, растут их показатели эффективности и качества, совершенствуются прежние и создаются новые конструкции, расширяются связи РЭС с другими системами.
Развитие микроэлектроники и вычислительной техники дало широкие возможности для применения в радиоэлектронике цифровых методов обработки и преобразования информации. Применение идей и методов цифровой обработки сигналов открывает принципиально новые возможности в различных областях радиоэлектроники и, прежде всего, в такой, как радионавигация. Для современного этапа развития авиационных РЭС характерно создание многофункциональных РЭС, тесно взаимодействующих как с другими бортовыми системами ВС, так и с наземными системами, объединяющими их в единый комплекс.
Современные боевые вертолёты и самолёты бомбардировочной, ракетоносной, истребительной и других родов авиации имеют десятки различных радиоэлектронных устройств, работающих автономно или в едином бортовом навигационном комплексе. Высокие темпы внедрения в авиацию новейших достижений науки и техники, методов и средств современной радиоэлектроники способствуют повышению эффективности авиационных РЭС и, следовательно, боевой мощи отечественной военной авиации. Для успешного овладения и управления авиационными РЭС современных ВС штурман экипажа должен обладать хорошими знаниями в своей профессиональной области, знать принципы построения и функционирования различных РЭС, а также уметь грамотно эксплуатировать их на земле и в полёте.
В данной части учебного пособия рассмотрены вопросы общего построения и основы теории функционирования различных радионавигационных средств, установленных на самолётах и вертолётах ВВС РФ. Вопросы построения, функционирования и предполетной проверки конкретных образцов радионавигационных устройств и систем учебно-штурманского самолёта в Челябинском ВВАУШ (ВИ) рассмотрены в учебном пособии А. Ю. Кудрявцев, А. М. Хаютин, Е. Н. Никитин «Авиационные радиоэлектронные системы самолета дальней авиации. Авиационные радионавигационные устройства и системы. Часть II».
рекомендуемАЯ литература
Авиационные радиоэлектронные средства [Текст]. В 3 ч. Ч. 1. Радионавигационное и радиосвязное оборудование : учеб. пособие / под общ. ред. М. И. Брицына. М. : Воениздат, 1981. 376 с.
Средства радиотехнического обеспечения полетов и посадки самолетов. Альбом схем. – М. : Воениздат. 1983. ДСП.
Авиационное радиоэлектронное оборудование [Текст] : учеб. для слушателей и курсантов инженерных ВВУЗов ВВС / Василенко Н.Т., Власов О. В., Курилов Н. Н., Павленко К. И. – М. : ВВИА им. проф. Н. Е. Жуковского, 1984.
Флеров А. Г., Тимофеев В. Т. Доплеровские устройства и системы навигации. – М. : Транспорт. 1987.
Авиационная радионавигация [Текст] : справ. / А. А. Сосновский, И. А. Хаймович, Э. А. Лутин, И. Б. Максимов; под общ. ред. А. А. Сосновского. – М. : Транспорт, 1990. 264 с.
Средства и системы радионавигационного обеспечения летательных аппаратов [Текст] : учеб. для инженерных вузов ВВС / В. Л. Владинов, Н. Н. Хмуров, В. В.Ковалев. М. : Военное издательство, 1990. 472 с.
Кудрявцев, А. Ю. Связь и радиосветотехническое оборудование аэродромов. Основы организации и правила воздушной радиосвязи [Текст] : учеб. пособие для курсантов ЧВВАУШ (ВИ) / А. Ю. Кудрявцев, Б. В. Иваненко, М. И. Хаютин; ЧВВАУШ (ВИ). – Челябинск : ЧВВАУШ (ВИ), 2006. – 100 с.
Хаютин, М. И. Связь и радиосветотехническое оборудование аэродромов. Приём на слух знаков радиотелеграфной азбуки, радио- и светотехническое оборудование аэродромов [Текст] : учеб. пособие для курсантов ЧВВАУШ (ВИ), в 2-х частях / М. И. Хаютин, А. М. Хаютин, Е. Н. Никитин; ЧВВАУШ (ВИ). – Челябинск : ЧВВАУШ (ВИ), 2007. – Ч. I. 150 с.
Приложения
Приложение 1