

Глава 3. ДальномернЫе радионавигационнЫе устройстВа и систеМы
3.1. Место и роль радиодальномеров в навигационном обеспечении летательных аппаратов
Дальномерные радионавигационные устройства и системы, называемые сокращенно радионавигационными дальномерами, предназначены для определения расстояний от летательного аппарата до радионавигационных точек (наземных станций, радиомаяков, других летательных аппаратов и т.п.). Радионавигационные дальномеры применяются для решения широкого круга задач ближней навигации и предпосадочного маневрирования, в частности задач точного самолетовождения и бомбометания по невидимым малоразмерным целям.
При решении таких навигационных задач, как посадка и полет на малых и предельно малых высотах, а также при выполнении боевых задач бомбометания, десантирования, фотографирования и т.д. для точного измерения истинной высоты полёта используется радиовысотомеры, являющиеся частным видом радионавигационных дальномеров.
Радионавигационные дальномеры, с помощью которых определяется расстояние до радионавигационных точек, могут использоваться самостоятельно, образуя дальномерные радионавигационные системы, однако наиболее широко они используются в составе радиотехнических систем ближней навигации и посадки и будут рассмотрены в соответствующем разделе.
Особую группу дальномерных радионавигационных устройств составляют самолетные ответчики дальности, используемые в системах вторичной радиолокации. Они существенно увеличивают дальность действия и помехозащищенность наземных радиолокационных станций, решающих задачи организации воздушного движения и посадки воздушных судов. Кроме того, они позволяют передавать на землю дополнительную информацию о режиме полета самолета и т.п.
Настоящий раздел посвящен изучению радиовысотомеров и самолётных ответчиков.
3.2. Основные методы радиодальнометрии
Работа радионавигационных дальномеров (РД) основана на использовании основных свойств радиоволн:
постоянства скорости;
прямолинейности их распространения в свободном пространстве;
способности отражаться от земной или водной поверхности и различных объектов (в дальнейшем земную, водную поверхность и объекты будем называть отражающей поверхностью).
Дальность определяется путем измерения промежутка времени между моментами излучения зондирующего и приема отраженного (ответного) сигнала. Измерение времени в РД осуществляется либо непосредственно, либо косвенно путем измерения фазы или частоты принятого радиосигнала. В зависимости от этого различают временные (импульсные), фазовые и частотные методы дальнометрии.
Рассмотрим краткую характеристику этих методов. Пусть источник, излучающий зондирующие сигналы, находится на некотором расстоянии D от отражающей поверхности.
И мпульсный
метод. Основан на измерении интервала
времени между моментом излучения
зондирующего сигнала и моментом приема
отраженного (ответного) сигнала.
Зондирующий сигнал представляет собой
периодическую последовательность
коротких радиоимпульсов длительностью
τи, повторяющихся с периодом ТП
(рис. 3.1).
мпульсный
метод. Основан на измерении интервала
времени между моментом излучения
зондирующего сигнала и моментом приема
отраженного (ответного) сигнала.
Зондирующий сигнал представляет собой
периодическую последовательность
коротких радиоимпульсов длительностью
τи, повторяющихся с периодом ТП
(рис. 3.1).
За время, прошедшее от момента излучения зондирующего импульса до его приема, радиоволна проходит путь от источника излучения до отражающей поверхности и обратно к приемнику отраженного (ответного) сигнала. Т. к. скорость распространения радиоволн постоянна (Vр с = 3108 м/с), то это время будет пропорционально измеряемой дальности:
![]() .
.
Отсюда дальность до отражающей поверхности может быть определена по формуле
![]() .
.
Достоинства:
простота реализации;
достаточно высокая точность измерения дальности.
Недостатки:
н
 евозможность
измерения малых дальностей из-за
запирания приемника на время излучения
зондирующего сигнала.
евозможность
измерения малых дальностей из-за
запирания приемника на время излучения
зондирующего сигнала.
Частотный
метод. Основан
на измерении разности частот зондирующего
сигнала fизл
и отраженного сигнала fотр.
Зондирующий сигнал представляет собой
непрерывный радиосигнал, частота
которого изменяется по определенному
закону (пилообразному, гармоническому)
(рис. 3.2). За время, прошедшее от
момента излучения зондирующего сигнала
до его приема мгновенная частота
о траженного
сигнала изменится по отношению к
мгновенной частоте зондирующего сигнала.
Разность частот Fp
= fизл - fотр
будет пропорциональна измеряемой
дальности.
траженного
сигнала изменится по отношению к
мгновенной частоте зондирующего сигнала.
Разность частот Fp
= fизл - fотр
будет пропорциональна измеряемой
дальности.
Достоинства:
возможность измерения малых дальностей, начиная с нулевых.
Недостатки:
низкая точность измерения дальности по сравнению с импульсным методом.
Фазовый метод. Основан на измерении разности фаз зондирующего сигнала ψизл и отраженного сигнала ψотр. Зондирующий сигнал представляет собой непрерывный радиосигнал. За время, прошедшее от момента излучения зондирующего сигнала до его приёма мгновенная фаза отраженного сигнала изменится по отношению к мгновенной фазе зондирующего сигнала (рис. 3.3). Разность фаз ψp = ψизл - ψотр = t0 - tD (t0=0) будет пропорциональна измеряемой дальности.
Достоинства:
высокая точность измерения дальности.
Недостатки:
сложность определения фазы отраженного сигнала;
неоднозначность в определении дальности, если период колебаний зондирующего сигнала превышает максимальную измеряемую дальность.
Для измерения высоты полета летательных аппаратов используются частотный и временной методы. В основу работы самолетных ответчиков положен временной (импульсный) метод.
3.3. Назначение и типы радиовысотомеров
Высота является важнейшим навигационным элементом полета. Знание высоты ВС над земной поверхностью является необходимым условием обеспечения безопасности полетов, а также решения ряда специальных задач: бомбометания, пуска ракет, фотографирования, десантирования и др.
Измерение высоты полета в настоящее время осуществляется двумя способами:
барометрическим;
радиолокационным.
Баровысотомер (БВ) измеряет абсолютную или относительную высоту. Его принцип действия основан на знании закономерностей изменения атмосферного давления при изменении высоты (1 мм. рт. ст. ≈ 11 м) (см. прил. 2). БВ, являясь одним из старейших авиационных приборов, до сих пор применяется на всех ВС для выполнения основных навигационных измерений.
Однако точность БВ является недостаточной для решения некоторых специальных задач (посадка, бомбометание и др.). Поэтому, наряду с БВ, на самолетах устанавливаются радиовысотомеры (РВ).
Радиовысотомеры предназначены для измерения истинной высоты полета летательного аппарата и относятся к классу автономных радионавигационных устройств, так как не требуют дополнительного наземного оборудования для измерения высоты.
В радиовысотомерах применяется радиолокационный принцип определения высоты по отраженному от подстилающей поверхности сигналу.
Передатчик (ПРД) (рис. 3.4) формирует колебания высокой частоты, которые с помощью передающей антенны Апрд излучаются в сторону подстилающей поверхности. Отраженный от нее сигнал поступает в приемную антенну Апрм, а с её выхода – в приёмник (ПРМ) радиовысотомера. Измеритель высоты вырабатывает напряжение U(Н), пропорциональное времени прохождения сигнала до подстилающей поверхности и обратно
tн=2Н/с, (3.1)
где с 3108 м/с – скорость распространения радиоволны, а, следовательно, пропорциональное истинной высоте Н.
 В
радиовысотомерах используются импульсные
радиосигналы или непрерывные
частотно-модулированные радиосигналы.
Вид используемых сигналов определяет
метод измерения высоты, а соответствующие
радиовысотомеры называются импульсными
или частотными.
В
радиовысотомерах используются импульсные
радиосигналы или непрерывные
частотно-модулированные радиосигналы.
Вид используемых сигналов определяет
метод измерения высоты, а соответствующие
радиовысотомеры называются импульсными
или частотными.
В зависимости от диапазона измеряемых высот радиовысотомеры подразделяются на радиовысотомеры малых и больших высот.
Радиовысотомеры малых высот (до 1 500 м) (РВ МВ) применяются, главным образом, для управления летательным аппаратом в вертикальной плоскости в системах захода на посадку и автоматической посадки. В таких радиовысотомерах, в основном, применяются непрерывные частотно-модулированные радиосигналы. Менее распространены радиовысотомеры малых высот с излучением импульсных радиосигналов.
Большинство радиовысотомеров малых высот дают информацию не только об истинной высоте полёта, но и о достижении самолетом установленной заданной высоты полета (или опасной высоты), а также о своей работоспособности. Эта информация обычно в виде постоянных напряжений поступает на индикаторы высоты и в другие навигационные системы.
Радиовысотомеры больших высот (до 30 000 м) (РВ БВ), в отличие от радиовысотомеров малых высот, устанавливаются только на самолетах бомбардировочной, военно-транспортной авиации и самолётах-разведчиках. Они предназначены для решения таких задач, как выдерживание заданной высоты полёта; автоматический ввод высоты для расчета данных на бомбометание, пуски ракет, аэрофотографирование, десантирование и т.д. Принцип действия радиовысотомеров больших высот основан на импульсном методе измерения дальности.
Основными параметрами радиовысотомеров являются диапазон рабочих высот и точность измерения высоты.
Диапазон рабочих высот – это интервал от минимальной Нмин до максимальной Нмакс измеряемых высот, в пределах которого обеспечивается определение высоты с заданными с точностью и вероятностью.
Точность характеризуется погрешностью измерения высоты.
Среднеквадратическая ошибка (СКО) измерения высоты РВ МВ
σH = (1…3) м + (5…8)%Н.
СКО измерения высоты РВ БВ
σH = (5…15) м + 0,25%Н.
Точность обычно указывается в метрах при измерениях высоты в диапазоне от 0 до некоторой высоты Н0 и в процентах от текущей высоты при полете на высотах больше Н0.
3.4. Принцип действия частотных радиовысотомеров
Частотный метод определения высоты основан на частотной модуляции излучаемых колебаний. Структурная схема частотного радиовысотомера (рис. 3.5) содержит генератор низкой частоты (ГНЧ), который вырабатывает низкочастотное напряжение с частотой Fм порядка сотен Герц. Это напряжение управляет частотой частотно-модулируемого генератора (ЧМГ), вырабатывающего высокочастотный сигнал, излучаемый антенной Апрд. Отраженный сигнал с приемной антенны АПРМ поступает на балансный смеситель (БС), куда подается также часть мощности излучаемого сигнала.
Запаздывание отраженного сигнала (3.1) на время, затрачиваемое на прохождение радиоволны до земли и обратно приводит к отличию мгновенных частот fизл и fотр. Из рис. 3.5б видно, что разностная частота Fр=fизл – fотр связана с временем tH следующим образом:
![]()
где Тм – период модуляции, fд – девиация частоты. Следовательно,
![]() (3.2)
(3.2)
С учетом (3.1) из уравнения (3.2) получаем основное уравнение частотного радиовысотомера
![]() (3.3)
(3.3)
г де
МF
– масштабный коэффициент.
де
МF
– масштабный коэффициент.
Таким образом, истинная высота полёта в частотных радиовысотомерах пропорциональна разностной частоте FР. Сигнал разностной частоты образуется на выходе балансного смесителя, реализующего функцию fизл – fотр.
Этот сигнал усиливается в усилителе низкой частоты (УНЧ) и поступает на измеритель частоты (ИЧ), с которого снимается напряжение U(Н), пропорциональное высоте полета. Это напряжение подается на указатель высоты (УВ) и в другие системы самолёта. Измеритель частоты реагирует на среднее значение разностной частоты Fр.ср, которое, как видно из рис. 3.5б, несколько меньше FР, за счет уменьшения FР до нуля в моменты совпадения fизл – fотр. Однако при tН Тм эти «провалы» незначительны и Fр.ср FР. Условие tН Тм является одним из определяющих при выборе частоты модуляции.
Наряду с симметричной пилообразной модуляцией (рис. 3.5б) применяются также гармоническая и несимметричная пилообразная модуляция (рис. 3.6). Наиболее широко применяются пилообразные законы модуляции.
В зависимости от ширины полосы пропускания усилителя низкой частоты, с помощью которого усиливается сигнал разностной частоты (преобразованный сигнал) различают широкополосные и узкополосные частотные радиовысотомеры.
В
 широкополосных
радиовысотомерах УНЧ
имеет полосу пропускания FУНЧ
значительно превосходящую ширину
спектра преобразованного сигнала Fс
(рис. 3.7). Крайние частоты Fмин
и Fмакс
полосы пропускания определяются
диапазоном измеряемых высот. Достоинством
таких радиовысотомеров является
относительная простота реализации,
однако они имеют более низкую
помехоустойчивость по сравнению с
узкополосными радиовысотомерами, так
как из-за широкой полосы пропускания
УНЧ в измеритель высоты попадает больше
помех. Для
повышения помехоустойчивости
широкополосных частотных радиовысотомеров
УНЧ выполняют с изменяемой в зависимости
от высоты полета амплитудно-частотной
характеристикой KУНЧ.
В таких радиовысотомерах УНЧ имеет вид
системы фильтров, которые переключаются
автоматически таким образом, чтобы
уменьшить полосу пропускания УНЧ и
одновременно не потерять полезный
сигнал. Сужение полосы пропускания
уменьшает суммарную мощность шумов,
проникающих через УНЧ на вход измерителя
частоты.
широкополосных
радиовысотомерах УНЧ
имеет полосу пропускания FУНЧ
значительно превосходящую ширину
спектра преобразованного сигнала Fс
(рис. 3.7). Крайние частоты Fмин
и Fмакс
полосы пропускания определяются
диапазоном измеряемых высот. Достоинством
таких радиовысотомеров является
относительная простота реализации,
однако они имеют более низкую
помехоустойчивость по сравнению с
узкополосными радиовысотомерами, так
как из-за широкой полосы пропускания
УНЧ в измеритель высоты попадает больше
помех. Для
повышения помехоустойчивости
широкополосных частотных радиовысотомеров
УНЧ выполняют с изменяемой в зависимости
от высоты полета амплитудно-частотной
характеристикой KУНЧ.
В таких радиовысотомерах УНЧ имеет вид
системы фильтров, которые переключаются
автоматически таким образом, чтобы
уменьшить полосу пропускания УНЧ и
одновременно не потерять полезный
сигнал. Сужение полосы пропускания
уменьшает суммарную мощность шумов,
проникающих через УНЧ на вход измерителя
частоты.
В узкополосных радиовысотомерах полосу пропускания тракта УНЧ выбирают близкой к ширине спектра преобразованного сигнала (рис. 3.8) и используют следящую систему, которая позволяет совмещать среднюю частоту Fр.ср преобразованного сигнала с частотой настройки тракта УНЧ F0. Такие радиовысотомеры обладают высокой точностью даже при небольших отношениях сигнал/шум на входе радиовысотомера. Это, прежде всего, обусловлено уменьшением суммарной мощности шумов на входе измерителя частоты при сужении полосы пропускания тракта УНЧ. Узкополосные частотные радиовысотомеры широко применяют в качестве высокоточных измерителей высоты, в частности, в системах автоматического захода на посадку.
О сновными
режимами работы частотных радиовысотомеров
являются режим «Измерение высоты» и
режим «Контроль», причем в режим
«Контроль» радиовысотомер переключается
автоматически с определенной
периодичностью. Основным предназначением
режима «Контроль» является поддержание
масштабного коэффициента МF
равным заданному, т.к. изменения МF,
как видно из выражения (3.3), приводят к
ошибкам измерения высоты. При отклонении
МF
от заданного значения система контроля
осуществляет его автоматическую
коррекцию. Если коррекцию выполнить не
удается, то выдается сигнал отказа на
индикаторную лампу и в системы,
использующие данные высотомера. Кроме
автоматического контроля имеется ручной
режим «Контроль», включаемый на указателе
высоты (рис. 3.9) и позволяющий проверить
работоспособность радиовысотомера,
например, на земле.
сновными
режимами работы частотных радиовысотомеров
являются режим «Измерение высоты» и
режим «Контроль», причем в режим
«Контроль» радиовысотомер переключается
автоматически с определенной
периодичностью. Основным предназначением
режима «Контроль» является поддержание
масштабного коэффициента МF
равным заданному, т.к. изменения МF,
как видно из выражения (3.3), приводят к
ошибкам измерения высоты. При отклонении
МF
от заданного значения система контроля
осуществляет его автоматическую
коррекцию. Если коррекцию выполнить не
удается, то выдается сигнал отказа на
индикаторную лампу и в системы,
использующие данные высотомера. Кроме
автоматического контроля имеется ручной
режим «Контроль», включаемый на указателе
высоты (рис. 3.9) и позволяющий проверить
работоспособность радиовысотомера,
например, на земле.
3.5. Принцип действия импульсных радиовысотомеров
Импульсный метод измерения высоты основан на использовании электромагнитных волн с импульсной модуляцией излучаемых колебаний. Упрощенная структурная схема импульсного радиовысотомера и временные диаграммы, поясняющие её работу, показаны на рис. 3.10.
Синхронизатор вырабатывает импульсный сигнал uсинх, с помощью которого одновременно запускаются передатчик и измеритель времени. На каждый пусковой импульс синхронизатора передатчик вырабатывает высокочастотный импульс (радиоимпульс), излучаемый через передающую антенну Апрд в сторону земли. Отраженный от поверхности земли радиоимпульс с приемной антенны Апрм поступает на приемник. Принимаемый сигнал uпрм задержан относительно излучаемого на время tH =2Н/с, пропорциональное высоте полета. Принятый импульс с выхода приемника подается на измеритель времени, который определяет интервал tН, а следовательно, и высоту полета. Напряжение, пропорциональное высоте, с выхода измерителя высоты поступает на индикатор и в другие системы. В импульсных радиовысотомерах указанные процессы повторяются с периодом Tп.
Импульсные радиовысотомеры больших высот строятся по классической схеме и отличаются, главным образом, типом измерителя времени.
В импульсных РВ применяются измерители высоты двух видов:
с косвенным измерением высоты с помощью электромеханической импульсно-фазометрической схемы (РВ-25);
с
 косвенным измерением высоты с помощью
электронной импульсной схемы (РВ-18).
косвенным измерением высоты с помощью
электронной импульсной схемы (РВ-18).
Принцип измерения высоты полета в РВ с косвенным измерением высоты с помощью электромеханической импульсно-фазометрической схемы и с помощью электронной импульсной схемы будет рассмотрен при изучении принципа действия соответствующих высотомеров.
 В
импульсных радиовысотомерах с косвенным
отсчетом специальная схема осуществляет
слежение за отраженными импульсами.
При этом она вырабатывает напряжение,
пропорциональное временной задержке
tН
отраженного сигнала, а значит и высоте.
Это напряжение используется, например,
для управления стрелками указателя
высоты (рис. 3.11). В некоторых радиовысотомерах
используются цифровые измерители
высоты, на выходе которых формируется
цифровой код (число), пропорциональный
высоте полёта, что удобно для сопряжения
с бортовой цифровой вычислительной
машиной.
В
импульсных радиовысотомерах с косвенным
отсчетом специальная схема осуществляет
слежение за отраженными импульсами.
При этом она вырабатывает напряжение,
пропорциональное временной задержке
tН
отраженного сигнала, а значит и высоте.
Это напряжение используется, например,
для управления стрелками указателя
высоты (рис. 3.11). В некоторых радиовысотомерах
используются цифровые измерители
высоты, на выходе которых формируется
цифровой код (число), пропорциональный
высоте полёта, что удобно для сопряжения
с бортовой цифровой вычислительной
машиной.
Современные импульсные РВ, благодаря новым техническим решениям, измеряют истинную высоту полета с высокой точностью, начиная с нулевой высоты. Примером такого РВ может служить радиовысотомер РВ-21, устанавливаемый на самолётах истребительной и фронтовой авиации. Отличительными особенностями его построения по сравнению с другими типами импульсных РВ являются:
измерение истинной высоты полета с нулевых высот, т. к. на время излучения ВЧ сигнала передатчиком приемник не запирается;
автоматическое изменение длительности излучаемого радиоимпульса в зависимости от истинной высоты полета (0,12 мкс при измерении Н от 0 до 512 м; 0,3 мкс при измерении Н от 512 до 11 000 м) (см. прил. 2);
применение схем автоматического регулирования мощности излучаемых сигналов.
Таким образом, вместо двух радиовысотомеров (больших и малых высот) используется один, обеспечивающий измерение истинной высоты полёта во всём заданном диапазоне высот.
3.6. Принцип функционирования самолётных ответчиков дальности
Как было отмечено раньше, самолётные ответчики являются составной частью системы вторичной радиолокации, то есть радиолокационной системы с активным ответом. Такая система включает в себя наземный радиолокационный запросчик и бортовой ответчик, обеспечивая активный ответ с увеличением дальности радиолокационного контроля самолётов в 1,5…2 раза, а также получение дополнительной навигационной информации (номер борта, остаток топлива, высота полёта).
К бортовому оборудованию системы относятся самолетные радиолокационные ответчики типа СО-72, СО-69, СО-63, СОД-57Д и др. Наземное оборудование системы включает радиолокационные станции различного назначения и аппаратуру отображения информации (рис. 3.12).
Рис. 3.12. Структурная
схема системы вторичной радиолокации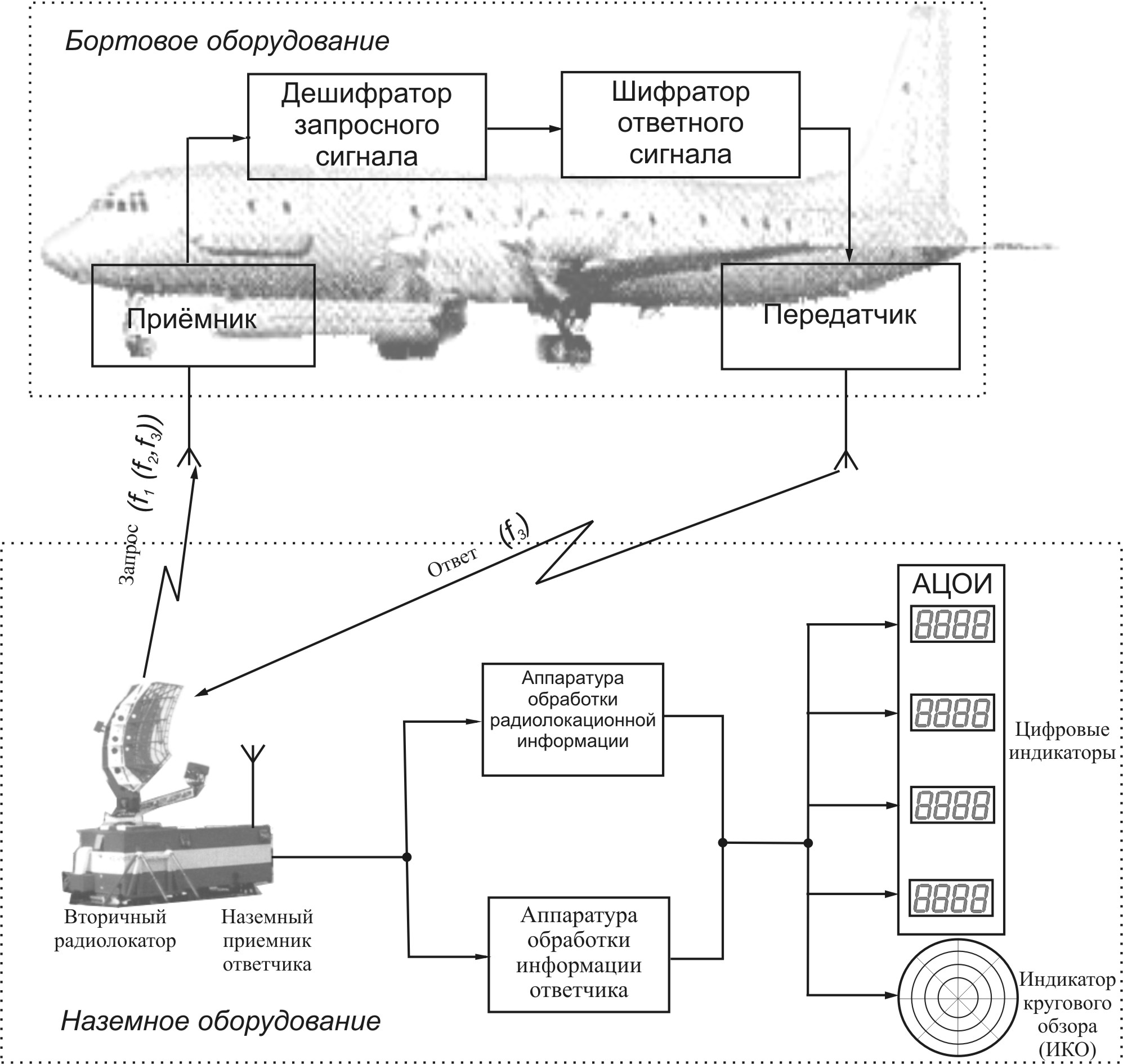
Принцип действия самолётного ответчика в составе системы вторичной радиолокации заключается в приеме на борту самолёта запросных сигналов вторичных наземных радиолокаторов и автоматическом излучении ответных кодированных сигналов.
Система работает следующим образом. Наземный радиолокатор на своей несущей частоте (на частоте одного из трёх диапазонов f1, f2 или f3) автоматически «запрашивает» самолетные ответчики, находящиеся в зоне его действия. Обзорные радиолокаторы для запроса используют одиночные импульсы, а диспетчерские и посадочные радиолокаторы радиолокационных систем посадки используют двухимпульсные посылки.
Запросные сигналы принимаются бортовым приемником ответчика, декодируется с помощью дешифратора (т.е. проверяется «правильность» запроса) и поступают в шифратор, который вырабатывает код ответного сигнала. Состав и структура кода определяется кодом запросного сигнала и режимом работы ответчика.
Закодированный ответный сигнал с помощью бортового передатчика ответчика излучается на частоте третьего диапазона f3. Этот сигнал содержит информацию о координатах самолета (азимут дальность) и, в зависимости от типа ответчика, дополнительную информацию, указанную ранее.
 Ответные
сигналы принимаются наземным приемником
ответчика, имеющего общую с радиолокатором
антенну. Радиолокационная информация
выделяется с помощью аппаратуры обработки
радиолокационной информации и
отображается, например, на индикаторе
кругового обзора в координатах
«азимут-дальность». При этом на экране
индикатора видны яркостные метки
соответствующих целей (рис. 3.13).
Использование активного режима вторичного
радиолокатора, т.е. работа по сигналу
ответчика вместо отраженного от
летательного аппарата сигнала, позволяет
выводить на экран индикатора только
метки отвечающих на запрос летательных
аппаратов. В то же время, полностью
исключается вывод на экран помех,
обусловленных отражениями от подстилающей
поверхности, метеообразований и т.д.
Ответные
сигналы принимаются наземным приемником
ответчика, имеющего общую с радиолокатором
антенну. Радиолокационная информация
выделяется с помощью аппаратуры обработки
радиолокационной информации и
отображается, например, на индикаторе
кругового обзора в координатах
«азимут-дальность». При этом на экране
индикатора видны яркостные метки
соответствующих целей (рис. 3.13).
Использование активного режима вторичного
радиолокатора, т.е. работа по сигналу
ответчика вместо отраженного от
летательного аппарата сигнала, позволяет
выводить на экран индикатора только
метки отвечающих на запрос летательных
аппаратов. В то же время, полностью
исключается вывод на экран помех,
обусловленных отражениями от подстилающей
поверхности, метеообразований и т.д.
Дополнительная информация выделяется с помощью аппаратуры обработки информации ответчика и отображается на соответствующих цифровых индикаторах (рис. 3. 12). Современные системы вторичной радиолокации позволяют сопровождать любые три выбранных самолёта и отображать информацию о них. Выбор самолётов осуществляется оператором радиолокатора.
Самолётный приёмник ответчика имеет высокую чувствительность и поэтому самолётный ответчик может запускаться запросными сигналами, излучаемыми по боковым лепесткам диаграммы направленности антенны вторичного радиолокатора, что приводит к появлению ложных отметок на экране индикатора (рис. 3.14).
Рис. 3.14. Появление
ложных меток на экране индикатора РЛС
из-за наличия боковых лепестков при
работе вторичного радиолокатора
в активном режиме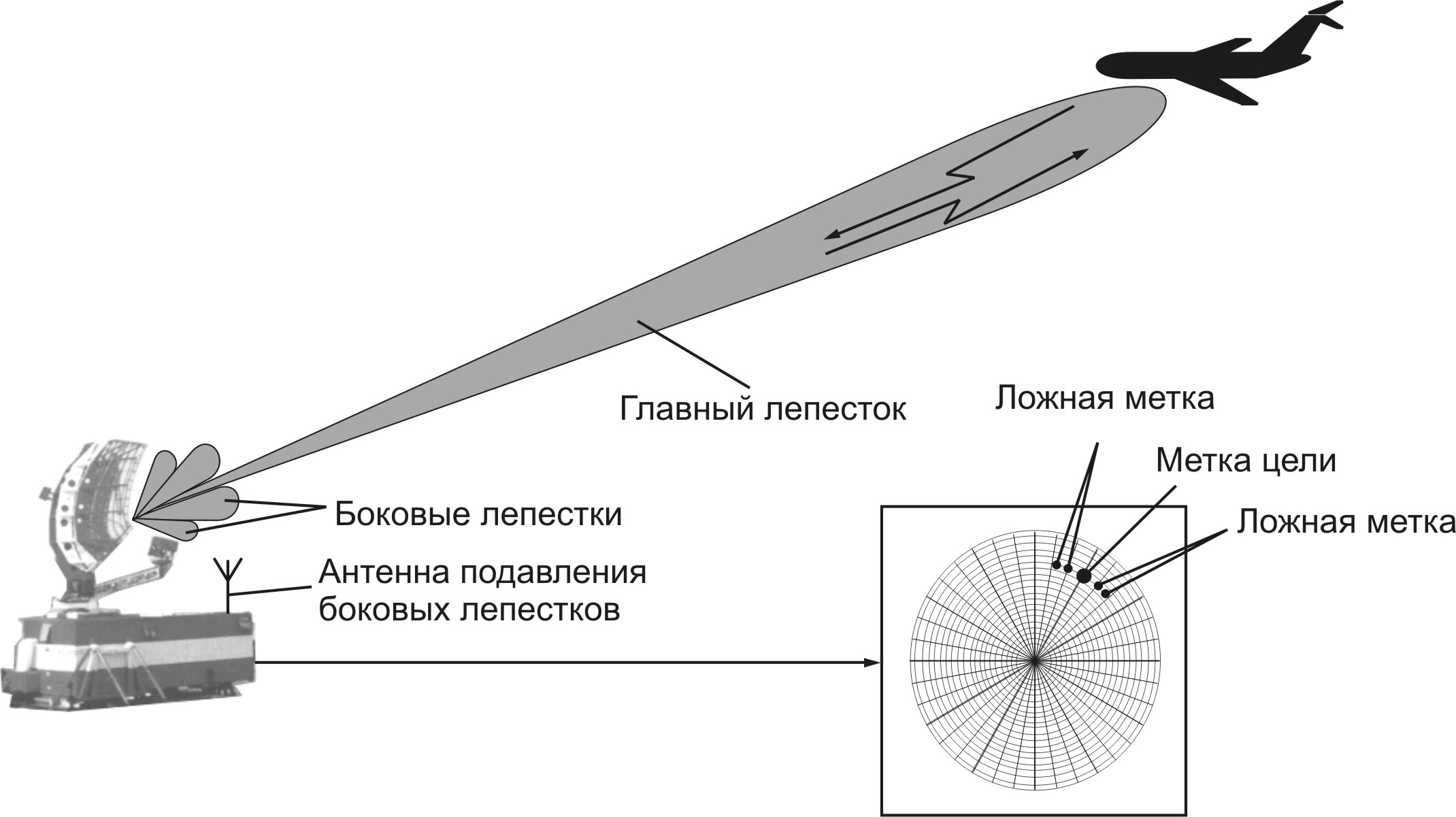
Кроме того, из-за достаточно большой мощности самолётного передатчика ответчика возможен приём ответных сигналов по боковым лепесткам диаграммы направленности антенны наземной РЛС, что также приводит к появлению ложных отметок, смещенных относительно истинного положения самолёта на угол, равный углу, заключенному между направлением главного лепестка и направлением лепестка, облучившего данный самолёт.
Для исключения ложных отметок наземный приёмник ответчика содержит канал компенсации (подавления) боковых лепестков, который имеет свою собственную приёмную антенну (рис. 3.14).
Используют два основных принципа подавления боковых лепестков:
подавление по ответу;
подавление по запросу.
При подавлении по ответу загрубляется чувствительность наземного приёмника ответчика и более слабые сигналы, принимаемые по боковым лепесткам, не отображаются на экране индикатора.
При подавлении по запросу загрубляется чувствительность самолётного приёмника, благодаря чему самолётный ответчик не срабатывает по более слабым запросным сигналам, излучаемым по боковым лепесткам диаграммы направленности антенны радиолокатора. Кроме того, для подавления сигналов бокового запроса используются «двухимпульсная» и «трёхимпульсная» системы подавления (рис. 3.15).
П ри
«двухимпульсной» системе подавления
первый импульс запросного кода (Р1)
излучается отдельной всенаправленной
антенной радиолокатора (рис. 3.15, антенна
подавления боковых лепестков), а второй
(Р2)
– направленной антенной. Ответчик
срабатывает только в случае определенного
соотношения мощностей импульсов Р1
и Р2
(рис. 3.15а), что, очевидно, соответствует
нахождению ответчика в направлении
основного лепестка. В случае приёма
запросного кода в направлении бокового
лепестка в результате амплитудного
сравнения происходит запирание входа
ответчика.
ри
«двухимпульсной» системе подавления
первый импульс запросного кода (Р1)
излучается отдельной всенаправленной
антенной радиолокатора (рис. 3.15, антенна
подавления боковых лепестков), а второй
(Р2)
– направленной антенной. Ответчик
срабатывает только в случае определенного
соотношения мощностей импульсов Р1
и Р2
(рис. 3.15а), что, очевидно, соответствует
нахождению ответчика в направлении
основного лепестка. В случае приёма
запросного кода в направлении бокового
лепестка в результате амплитудного
сравнения происходит запирание входа
ответчика.
В «трёхимпульсной» системе к двум импульсам, образующим запросный код (Р2, Р3), добавляется специальный импульс Р1, излучаемый всенаправленной антенной (рис. 3.15б). Во всех вариантах запроса он излучается через 2 мкс после первого по времени излучения (P2) запросного импульса. принцип подавления в этой системе основан на амплитудном сравнении импульсов кода Р2, Р3 и дополнительного импульса Р1.
Если самолёт находится в зоне действия основного лепестка диаграммы направленности антенны РЛС, т. е. происходит правильный запрос, то на входе приёмника действуют импульсы в следующем сочетании мощности Р1 < Р2 ≤ Р3. Первый (P2) и третий (P3) импульсы кодовые, они имеют большую мощность, а импульс подавления P1 меньшую.
Если самолёт в зоне действия бокового лепестка диаграммы направленности наземной РЛС, т. е. происходит неправильный запрос, то сочетание мощностей импульсов запросного сигнала будет обратное: Р2 < Р1 > Р3. Первый и третий кодовые импульсы имеют малую мощность, а импульс подавления – большую. Сигнал правильного запроса, принятый ответчиком, используется для запуска схемы формирования ответного сигнала-шифратоpa. Сигнал неправильного запроса в ответчике используется для блокировки входа шифратора, и поэтому ответного сигнала в нем не будет.