

Глава 1. Общие сведения о радиотехнических средствах навигации
1.1. Задачи и технические средства навигации
Основной задачей полёта является вывод воздушного судна в заданную точку с необходимой точностью, в определенный момент времени, по наивыгоднейшей для данных условий траектории.
Необходимое для выполнения этой задачи управление полётом может быть обеспечено только в том случае, если имеется информация о положении ВС, его движении и т. д. Процесс получения такой информации и есть навигация.
Навигацией называется наука о методах и средствах получения сведений о положении и движении управляемого подвижного объекта.
Технические средства, при помощи которых осуществляется навигация воздушных судов, называются навигационными устройствами и системами.
Процесс навигации воздушного судна состоит из последовательного выполнения ряда навигационных задач, основными из которых являются:
вывод ВС на заданную линию маршрута (на заданную траекторию) и обеспечение полёта по ней;
вывод ВС на цель в заданное время;
вывод ВС в район аэродрома посадки;
обеспечение посадки ВС;
определение навигационных элементов, необходимых для выполнения поставленного на полёт задания.
Эти задачи решаются с помощью различных технических средств навигации, которые в соответствии с используемыми в них физическими принципами действия можно разделить на пять основных групп:
1. Навигационно-пилотажные приборы общего назначения, действие которых основано на использовании различных физических свойств Земли и ее атмосферы (земной магнетизм, время, изменение атмосферного давления с высотой, зависимость давления воздуха от скорости и т. п.). К этой группе относятся самолетные навигационные и навигационно-пилотажные приборы (магнитные и гироскопические компасы, указатели скорости, барометрические высотомеры и т. д.).
2. Светотехнические и другие визуальные средства земного обеспечения самолетовождения, к которым относятся световые маяки, прожекторы ракеты, цветные дымовые шашки и т.д. Использование этих средств облегчает визуальную ориентировку в ночное и дневное время при достаточной прозрачности атмосферы. Однако эти средства не решают задач навигации в сложных метеоусловиях и не обеспечивают требуемой точности и надежности.
3. Астрономические средства навигации, основанные на использовании закономерного изменения взаимоположения Земли и различных светил. Астрономические навигационные приборы (авиационный секстант, астрономический компас, автоматический астроориентатор) обеспечивают вождение летательных аппаратов при отсутствии видимости Земли (полёт на больших высотах, над облаками, ночью), однако их применение возможно при хорошей видимости небесной сферы.
4. Инерциальные навигационные устройства, основанные на измерении ускорений ВС, вызванных силами негравитационного происхождения (тяга двигателей, силы сопротивления атмосферы, подъемная сила). Инерциальные навигационные устройства позволяют осуществлять счисление пути ВС. Они полностью автономны, имеют неограниченную дальность действия, свободны от воздействия помех. Однако инерциальные навигационные устройства требуют привязки к началу отсчета пути и дают ошибку в определении места ВС, которая возрастает с течением времени. Поэтому инерциальные навигационные устройства обычно применяются в комплексе с другими средствами, позволяющими периодически корректировать накапливающиеся ошибки.
5. Радиотехнические средства навигации, основанные на использовании закономерностей распространяющихся в пространстве электромагнитных колебаний. Они дают возможность осуществлять вождение ВС в условиях отсутствия видимости Земли и небесной сферы, т.е. при полетах в облаках, над зонами туманов, ночью при отсутствии световых ориентиров, а также над морем, пустынной местностью или льдами. Радиотехнические средства навигации обладают высокой точностью и достаточно большой дальностью действия.
Каждая из перечисленных групп имеет свои особенности, положительные и отрицательные свойства, обусловленные соответствующими физическими принципами. Знание свойств и особенностей, учет положительных и отрицательных сторон различных технических средств навигации позволяет рационально использовать их в полете и успешно решать все задачи самолетовождения.
Обычно различные технические средства навигации применяются комплексно. Это позволяет компенсировать недостатки одних преимуществами других и, в результате, получить более высокую точность измерения навигационных параметров и улучшить другие тактико-технические показатели навигационной системы. Комплексирование обычно осуществляется на базе вычислительных машин. Это позволяет автоматизировать решение навигационных задач.
1.2. Основные навигационные элементы
Для выполнения полета в заданную точку пространства в течение заданного времени ВС должно лететь по определенной траектории, для чего необходимо выдерживать определенное направление и режим полета, характеризуемые навигационными элементами.
Величины, характеризующие положение летательного аппарата в пространстве, скорость и направление его движения, называются навигационными элементами (параметрами).
Для оценки навигационных параметров наиболее важным вопросом является выбор системы координат. Координатные системы, используемые для решения навигационных задач в трёхмерном навигационном пространстве, классифицируются по следующим признакам:
по положению начала координатной системы;
по ориентации начальной плоскости отсчёта;
по связанности с телом, в центре которого размещено начало координат;
по геометрическим свойствам координат.
Кроме того, в зависимости от масштабов перемещений объектов системы координат могут быть местными, глобальными и космическими.
К навигационным элементам относятся величины, определяющие координаты центра тяжести ВС в пространстве, его положение относительно центра тяжести, направление и скорость полета, положение ВС относительно ориентиров (или положение ориентиров относительно ВС). Рассмотрим сущность навигационных элементов.
 Место
воздушного судна – это проекция
его центра тяжести на земную поверхность.
Для определения места ВС широко
используется географическая система
координат, в которой координаты ВС в
пространстве определяются географической
широтой , географической
долготой и высотой
полёта H (рис. 1.1).
Место
воздушного судна – это проекция
его центра тяжести на земную поверхность.
Для определения места ВС широко
используется географическая система
координат, в которой координаты ВС в
пространстве определяются географической
широтой , географической
долготой и высотой
полёта H (рис. 1.1).
Географическая долгота () – это угол между плоскостью гринвичского меридиана и плоскостью меридиана, проходящего через точку М места ВС. Долгота отсчитывается на восток (восточная долгота) и на запад (западная долгота) от 0 до 180º.
Географическая широта () – это угол между плоскостью экватора и направлением радиуса-вектора точки М. Широта отсчитывается на север (северная широта) и на юг (южная широта) от 0 до 90º.
Высотой полета (H) называется расстояние между воздушным судном и земной поверхностью, измеренное по вертикали. В зависимости от выбора уровня отсчета высоты в навигации различают абсолютную, относительную и истинную высоты (рис. 1.2). Абсолютной (Hабс) называют высоту относительно уровня моря (за начало отсчета принят уровень Балтийского моря). Относительной (Hотн) называют высоту, измеренную относительно некоторой поверхности, принятой за исходную (нулевую). Обычно такой поверхностью является аэродром вылета и посадки. Истинной высотой (Hист) называется расстояние от ВС до расположенной под ним точки подстилающей поверхности.
 При
определении положения ВС в пространстве
пользуются горизонтальной и связанной
системами прямоугольных координат.
При
определении положения ВС в пространстве
пользуются горизонтальной и связанной
системами прямоугольных координат.
В горизонтальной системе координат за основную плоскость отсчета принята горизонтальная плоскость Оx0z0, перпендикулярная к местной вертикали. Начало системы координат Ox0y0z0 совмещено с центром тяжести ВС, горизонтальная ось Оx0 направлена на север и касается географического меридиана, горизонтальная ось Оz0 направлена на восток, а вертикальная ось Оy0 совпадает с линией отвеса (рис. 1.3).
В связанной системе координат Оxyz, начало которой также совмещено с центром тяжести ЛА, ось Оx направлена вперед по продольной оси, ось Оy – по нормальной оси вверх, а ось Оz – по поперечной оси вправо. Эта система координат жестко связана с летательным аппаратом (рис. 1.3).
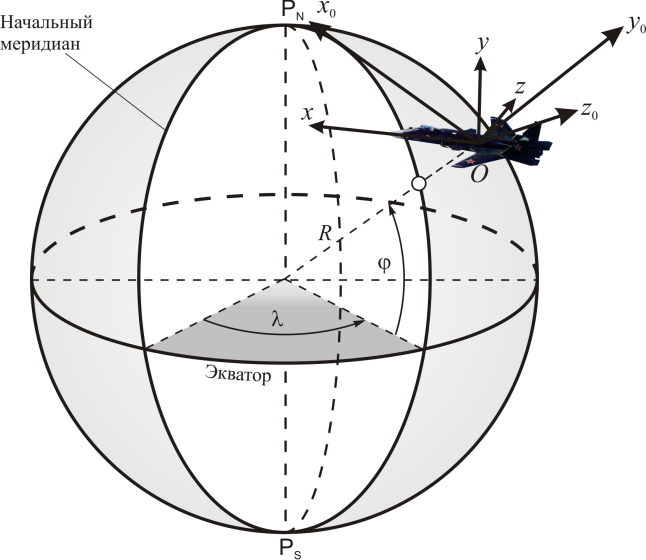
Рис. 1.3. Горизонтальная Ox0y0z0 и связанная Oxyz системы координат
Положение ВС относительно горизонтальной системы координат определяется углами истинного курса, тангажа и крена.
И стинным
курсом (ИК) воздушного
судна (рис. 1.4) называется угол в
горизонтальной плоскости между северным
направлением географического меридиана
центра тяжести ВС и проекцией продольной
оси Оx
ВС на горизонтальную плоскость. Курс в
навигации отсчитывается по часовой
стрелке от меридиана к проекции продольной
оси ВС в пределах от 0 до 360º.
стинным
курсом (ИК) воздушного
судна (рис. 1.4) называется угол в
горизонтальной плоскости между северным
направлением географического меридиана
центра тяжести ВС и проекцией продольной
оси Оx
ВС на горизонтальную плоскость. Курс в
навигации отсчитывается по часовой
стрелке от меридиана к проекции продольной
оси ВС в пределах от 0 до 360º.
П
Рис. 1.4. Определение
курса самолёта
Рис. 1.5. Определение
углов положения ВС в вертикальной
плоскости ри
использовании магнитного компаса отсчет
ведется от магнитного меридиана, который
в общем случае не совпадает с географическим
и отклонен от него на угол M,
называемый магнитным склонением.
Оно считается положительным, если
магнитный меридиан отклонен к востоку
(вправо в Восточном п
ри
использовании магнитного компаса отсчет
ведется от магнитного меридиана, который
в общем случае не совпадает с географическим
и отклонен от него на угол M,
называемый магнитным склонением.
Оно считается положительным, если
магнитный меридиан отклонен к востоку
(вправо в Восточном п
ИК = МК + (±ΔМ),
МК = КК + (±ΔК).
Углом тангажа () называется угол между горизонтальной плоскостью Оx0z0 и продольной осью ВС Оx (рис. 1.5). Угол тангажа считают положительным, если продольная ось ВС отклонена против часовой стрелки относительно плоскости горизонта.
Углом крена () называется угол между плоскостью горизонта и направлением поперечной оси Оz летательного аппарата (рис. 1.6). Крен возникает при повороте ВС вокруг продольной оси Оx. Угол крена считается положительным, если правое крыло находится ниже плоскости горизонта. Углы крена и тангажа измеряются в пределах ±90°.
П ри
решении ряда навигационных и боевых
задач необходимо знать скорость полёта
ВС. В воздушной навигации различают
воздушную и путевую скорость.
ри
решении ряда навигационных и боевых
задач необходимо знать скорость полёта
ВС. В воздушной навигации различают
воздушную и путевую скорость.
В оздушной
скоростью (V)
называют скорость полёта ВС относительно
воздушной среды. Величина воздушной
скорости зависит от технических свойств
ВС, режима полёта, плотности и температуры
воздуха. Воздушная скорость ВС направлена
по касательной к траектории
движения и обычно
не совпадает с осью Оx
связанной системы координат (рис. 1.5).
Положение вектора скорости V
относительно горизонтальной системы
координат характеризуется углом наклона
траектории θ, а относительно связанной
системы координат – углом атаки .
оздушной
скоростью (V)
называют скорость полёта ВС относительно
воздушной среды. Величина воздушной
скорости зависит от технических свойств
ВС, режима полёта, плотности и температуры
воздуха. Воздушная скорость ВС направлена
по касательной к траектории
движения и обычно
не совпадает с осью Оx
связанной системы координат (рис. 1.5).
Положение вектора скорости V
относительно горизонтальной системы
координат характеризуется углом наклона
траектории θ, а относительно связанной
системы координат – углом атаки .
Скорость
ВС относительно земной поверхности
называется полной
скоростью
![]() ,
которая равна геометрической сумме
векторов воздушной скорости
,
которая равна геометрической сумме
векторов воздушной скорости
![]() и скорости ветра
и скорости ветра
![]()
![]()
Горизонтальные
составляющие векторов
,
,
(соответственно
![]() ,
,
![]() ,
) образуют так называемый навигационный
треугольник скоростей (рис. 1.7). При
этом горизонтальная составляющая полной
скорости
называется
путевой
скоростью
,
) образуют так называемый навигационный
треугольник скоростей (рис. 1.7). При
этом горизонтальная составляющая полной
скорости
называется
путевой
скоростью
![]() .
Проекция путевой скорости на земную
поверхность определяет направление
линии фактического пути летательного
аппарата, а угол между северным направление
меридиана центра тяжести ВС и линией
пути называется фактическим
путевым углом
(ФПУ).
.
Проекция путевой скорости на земную
поверхность определяет направление
линии фактического пути летательного
аппарата, а угол между северным направление
меридиана центра тяжести ВС и линией
пути называется фактическим
путевым углом
(ФПУ).
Угол
в горизонтальной плоскости между
проекцией продольной оси ВС и вектором
путевой скорости называется углом
сноса (с).
Угол сноса отсчитывается от вектора
![]() в сторону вектора
и считается положительным при отсчете
по часовой стрелке и отрицательным –
при отсчете против часовой стрелки. Для
полёта в заданном направлении необходимо
учитывать влияние ветра (угол сноса) и
выдерживать такой курс, чтобы линия
фактического пути совпадала с линией
заданного пути.
в сторону вектора
и считается положительным при отсчете
по часовой стрелке и отрицательным –
при отсчете против часовой стрелки. Для
полёта в заданном направлении необходимо
учитывать влияние ветра (угол сноса) и
выдерживать такой курс, чтобы линия
фактического пути совпадала с линией
заданного пути.
П ри
решении задач навигации часто приходится
определять угловые координаты ВС
относительно известных ориентиров на
Земле. К числу этих ориентиров относятся
различные радионавигационные точки
(РНТ). Положение радиостанции относительно
ВС определяется курсовым
углом и
пеленгом
(рис. 1.8).
ри
решении задач навигации часто приходится
определять угловые координаты ВС
относительно известных ориентиров на
Земле. К числу этих ориентиров относятся
различные радионавигационные точки
(РНТ). Положение радиостанции относительно
ВС определяется курсовым
углом и
пеленгом
(рис. 1.8).
Курсовым углом радиостанции (КУР) называется угол в горизонтальной плоскости между продольной осью ВС и направлением на радиостанцию. Курсовой угол измеряется с помощью бортовых радиопеленгаторов и отсчитывается от продольной оси ВС по часовой стрелке в пределах 0…360.
Пеленгом радиостанции относительно ВС называется угол в горизонтальной плоскости между северным направлением меридиана центра тяжести ВС и направлением на радиостанцию. Пеленг может отсчитываться относительно истинного (географического) или магнитного меридиана. В соответствии с этим он именуется истинным пеленгом радиостанции (ИПР) или магнитным пеленгом радиостанции (МПР). ИПР называется также азимутом.
Из рис. 1.8 видно, что
ИПР = ИК + КУР.
Наряду с пеленгом радиостанции широко используется пеленг самолёта, отсчитываемый от меридиана точки, в которой расположена пеленгуемая радиостанция. Истинный пеленг самолёта и истинный пеленг радиостанции (рис. 1.8) связаны соотношением
ИПС = ИПР 180 + g,
где
![]() – поправка на схождение меридианов
(берется из таблиц для заданной разности
географических долгот места самолета
и радиостанции в зависимости от типа
картографической проекции).
– поправка на схождение меридианов
(берется из таблиц для заданной разности
географических долгот места самолета
и радиостанции в зависимости от типа
картографической проекции).
1.3. Классификация радиотехнических средств навигации
Радиотехнические средства, предназначенные для решения навигационных задач, называются радионавигационными устройствами и системами.
Радионавигационным устройством (РНУ) называется радиотехнический аппарат, основанный на определенном физическом принципе действия и предназначенный для определения одной или нескольких навигационных величин. Радионавигационное устройство может использоваться как самостоятельно, так и в комплексе с другими РНУ.
Радионавигационной системой (РНС) называется совокупность нескольких РНУ, основанных на общем физическом принципе действия, расположенных на борту ВС и в определенных точках на Земле, взаимодействующих между собой и служащих для определения одной или нескольких навигационных величин.
В ряде случаев для решения навигационных задач используется совокупность навигационных устройств (радиотехнических и нерадиотехнических), основанных на различных физических принципах действия. Такие навигационные системы называют комплексными навигационными системами.
РНУ и РНС основаны на использовании трех основных свойств распространения радиоволн:
радиоволны распространяются по кратчайшему расстоянию между пунктами на земной поверхности;
радиоволны имеют практически постоянную скорость распространения Vр, равную приблизительно скорости света с 3108 м/с;
при взаимном перемещении источника и приемника электромагнитных колебаний происходит сдвиг частоты колебаний, пропорциональный их относительной скорости (эффект Доплера).
На использовании первого свойства основаны РНУ, определяющие направление; на использовании первого и второго свойств основаны устройства, определяющие расстояние между точками или разности (суммы) расстояний до двух точек; на использовании третьего свойства основаны измерители скорости ВС (доплеровские).
Рассматривают различные способы классификации РНУ. Так, при классификации по навигационному параметру, учитывают, что чаще всего в РНУ измеряется расстояние, разность или сумма расстояний, угол и скорость. Соответственно, различают дальномерные РНУ, суммарно-дальномерные РНУ, разностно-дальномерные РНУ, угломерные РНУ и измерители скорости (рис. 1.9).
Работа РНУ основана на излучении и приёме радиосигналов, в которых информация о навигационной величине содержится в каком-либо параметре, характеризующем электромагнитное поле. Фактически в РНУ измеряют электрические величины (амплитуду сигнала Um(t) или отношение амплитуд, разность фаз, частоту сигнала f или разность частот, время распространения или разность времени распространения сигналов (t – tз)
![]()
а затем по результатам этих измерений
определяют неэлектрическую навигационную
величину: направление (азимут), расстояние
(дальность) или разность расстояний,
скорость летательного аппарата.
затем по результатам этих измерений
определяют неэлектрическую навигационную
величину: направление (азимут), расстояние
(дальность) или разность расстояний,
скорость летательного аппарата.
 В
соответствии с используемым для измерений
параметром электромагнитного поля
различают амплитудные, фазовые,
частотные, временные и
корреляционные РНУ и РНС (рис. 1.10).
При этом измерения могут производиться
как на несущей (высокой) частоте, так и
на частоте модуляции (низкой).
В
соответствии с используемым для измерений
параметром электромагнитного поля
различают амплитудные, фазовые,
частотные, временные и
корреляционные РНУ и РНС (рис. 1.10).
При этом измерения могут производиться
как на несущей (высокой) частоте, так и
на частоте модуляции (низкой).
Амплитудные РНУ и РНС основаны на создании и использовании зависимости амплитуды радиосигнала от пространственных координат, прежде всего, от направления в пространстве. Для этого используется направленное излучение или направленный прием радиоволн с помощью специальных антенн направленного действия. По характеру измеряемой величины амплитудные РНУ используются, в основном, как угломерные.
Фазовые РНС основаны на создании и использовании зависимости фазы электрического поля от пространственных координат. Фаза изменяется с изменением расстояния от точки излучения. Поэтому такие системы в основном строятся как дальномерные или разностно-дальномерные. В некоторых случаях можно создать также зависимость фазы от направления. Поэтому фазовые системы могут быть и угломерными.
Частотные РНУ основаны на создании и использовании зависимости частоты от пространственных координат и скорости ВС. Частотные устройства могут быть дальномерными, разностно-дальномерными, а также измерителями скорости.
Временные (импульсные) РНС основаны на использовании зависимости времени распространения радиоволн от пространственных координат. Временные РНУ и РНС используются для измерения расстояний и разности расстояний и, соответственно, являются дальномерными или разностно-дальномерными. Наиболее просто временные устройства и системы реализуются при импульсном режиме работы, поэтому часто их называют импульсными РНУ и РНС.
Радионавигационные устройства могут работать и по шумоподобному сигналу, например, по радиолокационному или по оптическому изображению земной поверхности. При этом осуществляется сравнение текущего значения сигнала (изображения) с полученным заранее эталонным сигналом (изображением). Эта операция называется корреляцией, а соответствующие РНУ и РНС – корреляционными.
Широкое распространение получили также комбинированные системы, у которых используется одновременно два параметра электромагнитного поля, зависящие от различных навигационных величин. Если, например, при импульсном режиме работы использовать направленное излучение, то можно одновременно два параметра электромагнитного поля, зависящие от различных навигационных величин. Если, например, при импульсном режиме работы использовать направленное излучение, то можно одновременно измерять угловые координаты и дальность. Такая система по используемым параметрам электромагнитного поля является амплитудно-временной, а по измеряемым координатам – угломерно-дальномерной.
Классификацию РНУ и РНС можно производить и по другим характерным признакам:
По назначению различают системы:
дальней навигации;
ближней навигации;
системы и устройства для управления полетами в районе аэродрома и обеспечения посадки;
системы и устройства для решения вспомогательных задач (опознавания, предупреждения столкновений и др.).
2. По характеру излучения различают устройства и системы с:
непрерывным излучением;
импульсным излучением.
3. По степени автономности различают:
автономные РНУ и РНС;
неавтономные РНУ и РНС.
4. По степени автоматизации различают:
автоматические;
полуавтоматические;
неавтоматические РНУ и РНС.
1.4. Основные тактико-технические показатели радионавигационных устройств и систем
К основным тактическим показателям относятся следующие показатели РНУ и РНС:
1. Точность. Это способность системы обеспечить решение основных навигационных задач с погрешностью, не превышающей допустимую.
2. Рабочая область и дальность действия. Рабочей областью РНУ называют объём пространства, в пределах которого РНУ удовлетворяет всем предъявляемым к нему тактико-техническим требованиям. Дальностью действия называется максимальное расстояние между ВС и радионавигационной точкой, при котором надежно обеспечивается заданная точность системы.
3. Пропускная способность определяется как максимальное число ВС, одновременно обслуживаемых данным РНУ или РНС. Ограничение пропускной способности свойственно тем РНУ и РНС, которые работают по принципу «запрос – ответ». Превышение пропускной способности может привести к перегрузке наземного оборудования и к снижению помехозащищенности РНУ и РНС.
4. Оперативность (быстродействие) РНУ и РНС определяется временем, затрачиваемым на получение навигационной информации. Считается, что на дозвуковых ВС время, затрачиваемое на определение местоположения, не должно превышать 1 минуты, при интервалах между измерениями не более 10 минут. На сверхзвуковых ВС это время снижается до нескольких секунд, а интервалы между измерениями не должны быть более 5 минут.
5. Надежность РНУ и РНС характеризует их свойство сохранять тактические параметры (прежде всего точность) в заданных пределах при определенных условиях эксплуатации. В качестве показателей надежности используют вероятность и среднее время безотказной работы. Надежность обеспечивается принципом действия РНУ или РНС, качеством применяемых материалов и деталей, правильным режимом их работы, соблюдением всех правил эксплуатации и обслуживания, а в особо важных случаях – применением резервных устройств.
6. Помехозащищенность РНУ и РНС – это их способность надежно работать при наличии искусственных и естественных помех. Она слагается из скрытности работы системы и помехоустойчивости аппаратуры.
Скрытность работы определяется временем работы радиопередатчиков на излучение и мерами по противодействию радиоразведке.
Помехоустойчивость характеризует возможность работы РНУ и РНС в условиях радиопомех. Количественно помехоустойчивость оценивается отношением сигнал/помеха, при котором ошибка определения навигационного параметра не превышает заданного значения с заданной вероятностью.
7. Эксплуатационная эффективность характеризуется средними затратами времени на настройку, регулировку и обслуживание устройств и систем по сравнению со временем использования их по назначению.
8. Масса и габариты бортовой аппаратуры. Требование снижения массы и габаритов бортовой аппаратуры является постоянно действующим и все более жестким. Увеличение массы и габаритов аппаратуры приводит к снижению полезной загрузки ВС или сокращению дальности полёта.
К основным техническим показателям относятся: рабочая частота, мощность передающих устройств, чувствительность приемных устройств, потребляемая мощность и т.п. Технические показатели рассчитываются при проектировании РНУ и РНС так, чтобы их тактические характеристики соответствовали заданным требованиям.
1.5. Понятие о комплексировании радионавигационных устройств и систем
Под комплексированием бортовой аппаратуры понимают методы и средства совместной обработки информации от нескольких датчиков (радионавигационных и инерциальных систем) с целью повышения точности и надежности измерений.
При высокой плотности и жестких требованиях к регулярности и безопасности полетов трудно, а порой и невозможно обеспечить точность и надежность бортового оборудования с помощью отдельно взятых навигационных и посадочных устройств. Для получения навигационной информации в указанных условиях применяют комплексные навигационные системы (КНС).
Принцип комплексирования основан на избыточности измерительной системы, т.е. использовании не менее двух измерителей, определяющих (в простейшем случае) один и тот же навигационный параметр. Информация от этих измерителей подвергается совместной обработке в вычислительном устройстве (обычно в цифровой вычислительной машине). При этом оцениваются составляющие погрешности одного из измерителей принятого за основной (базовый), и осуществляется коррекция или погрешностей или самого измерителя. В качестве алгоритма совместной обработки информации наиболее широко используется алгоритм Калмана (фильтр Калмана).
Например, в комплексной навигационной системе определения скорости ВС по данным инерциальной навигационной системы (ИНС) и доплеровского измерителя скорости и угла сноса (ДИСС) основным измерителем является ИНС, слабо подверженная воздействию помех, но имеющая свойство накапливать ошибку измерения. ДИСС, в свою очередь, подвержен воздействию помех, но ошибка измерения не накапливается. Комплексирование ИНС и ДИСС позволяет примерно в 5 раз повысить точность основного измерителя – ИНС. При комплексировании ИНС и ДИСС с целью определения места летательного аппарата точность возрастает примерно в 70 раз, по сравнению с точностью ИНС. При использовании в КНС большого количества навигационных измерителей различного типа и при повышении их качества удается получить более высокие коэффициенты повышения точности.
Другим достоинством КНС является повышение надежности. Отказ одного из измерителей приводит к снижению точности системы, но не к потере информации об измеряемом навигационном параметре. Кроме того, комплексирование облегчает работу экипажа благодаря автоматизации процессов получения и обработки информации от различных измерителей и формирования сигналов, необходимых для управления воздушным судном.
Обобщенная структурная схема комплексной навигационной системы представлена на рис. 1.11.
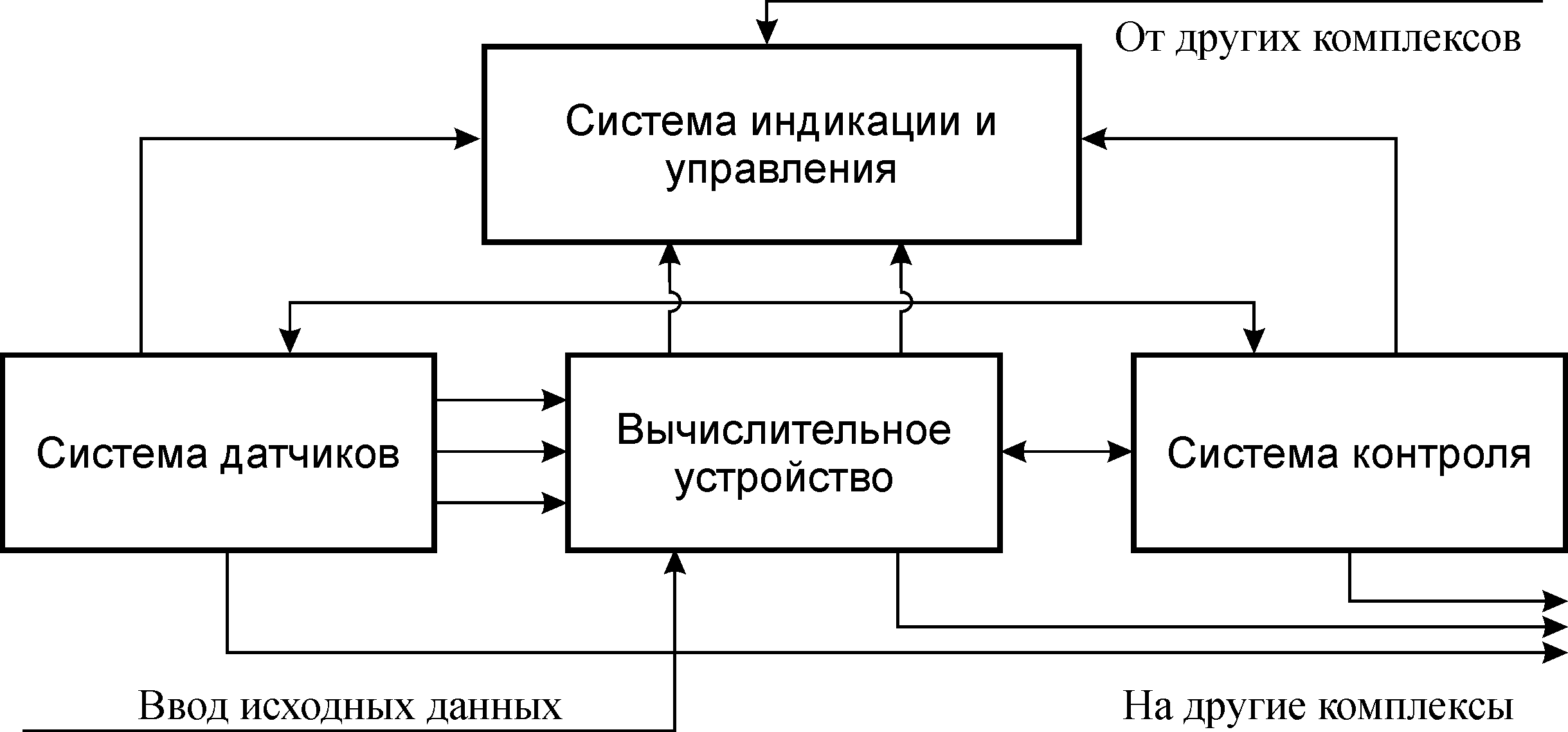
Рис. 1.11. Обобщенная
структурная схема КНС
Система индикации и управления является связующим звеном между экипажем и КНС. Эта система информирует экипаж о функционировании отдельных элементов комплекса и получаемых с их помощью данных, позволяя экипажу вмешиваться в работу бортовых систем и предпринимать соответствующие действия по выполнению полета. В состав этой системы входят индикаторы, в том числе комплексные, а также органы управления как комплексом в целом, так и отдельными его устройствами и системами.
Система контроля предназначена для автоматической проверки работоспособности элементов комплекса и автоматического перехода на резерв в случае отказа одного из них. В простейших случаях последняя операция выполняется экипажем по сигналам системы контроля. Система контроля предотвращает использование экипажем бортового оборудования, параметры которого не соответствуют установленным допускам. Обязательное условие успешного функционирования системы контроля – наличие в бортовой аппаратуре встроенных устройств контроля. Для обеспечения контроля может выделяться часть вычислительных возможностей вычислительного устройства.