

Глава 2. Угломерные радионавигационные систеМы
2.1. Назначение и классификация угломерных радионавигационных систем
Угломерные радионавигационные системы предназначены для определения пеленга передающей радиостанции.
Решение этой задачи осуществляется с помощью разнесенных в пространстве передающего и приемного устройств. Физической основой угломерных радионавигационных систем является использование свойств прямолинейного распространения радиоволн и возможности их направленного излучения и приема.
Широкое применение нашли следующие виды угломерных радионавигационных систем:
радиокомпасные;
радиопеленгаторные;
радиомаячные.
Радиокомпасная угломерная система состоит из бортовых радиопеленгаторов и наземных или бортовых радиопередающих устройств.
Радиопеленгатором называется приемное устройство, предназначенное для определения направления на источник излучения радиоволн. В качестве радиопеленгаторов на самолетах используются автоматические радиокомпасы (АРК), а в качестве передающих устройств – приводные аэродромные радиостанции (ПАР), радиовещательные станции (РВС), самолетные связные и аварийные радиостанции.
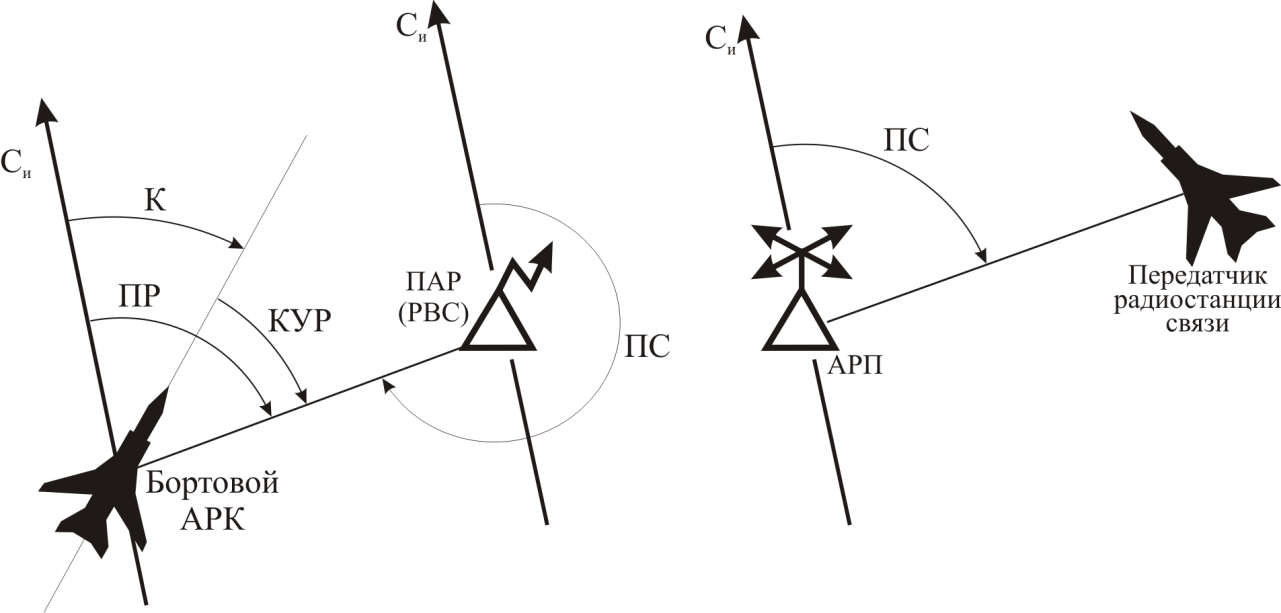
С помощью АРК на самолете определяется курсовой угол радиостанции (рис. 2.1а).
а) б)
Рис. 2.1. Определение пеленгов в радиокомпасных (а)
и радиопеленгаторных (б) угломерных системах
Зная курсовой угол радиостанции (КУР) и курс полёта (К), определяемый, например, с помощью курсовой системы, можно определить пеленг радиостанции (ПР) и пеленг самолёта (ПС). В настоящее время применяются радиокомпасы средневолнового и ультракоротковолнового (см. прил. 1) диапазонов радиоволн.
Средневолновые АРК образуют угломерную систему совместно с ПАР или РВС. Такая система предназначена для решения следующих основных задач:
определение линии положения и места самолёта;
контроль пути по дальности и направлению;
вывод самолета в заданную точку;
полет на радионавигационную точку;
определение навигационных элементов полёта;
построение предпосадочного маневра и выполнения захода на посадку.
Ультракоротковолновый (УКВ) АРК совместно с самолётными командными радиостанциями образуют угломерную систему для осуществления межсамолётной навигации, а совместно с аварийными УКВ радиостанциями служит для вывода поискового самолёта в район аварии.
Радиокомпасные угломерные системы обладают точностью определения пеленга 2…3 и имеют неограниченную пропускную способность. Недостатком системы является подверженность ее различным видам естественных и организованных помех.
Радиопеленгаторная угломерная система состоит из наземного автоматического радиопеленгатора (АРП) и самолётной передающей радиостанции. Наземный радиопеленгатор обеспечивает определение пеленга самолёта (рис. 2.1б) путем пеленгации работающей на передачу бортовой радиостанции во время запроса пеленга летчиком (штурманом). Измеренный пеленг передается на борт с помощью средств радиосвязи, имеющихся у оператора наземного радиопеленгатора.
Радиопеленгаторная угломерная система используется для решения следующих задач:
определения линии положения и места самолёта;
вывода самолёта в заданный район;
осуществление захода на посадку;
полета на наземный радиопеленгатор и от него.
Точность определения пеленга 1…2.
Радиопеленгаторные системы, как и радиокомпасные в значительной мере подвержены различным видам помех. Кроме того, радиопеленгаторные системы имеют ограниченную пропускную способность.
Радиомаячная угломерная система состоит из наземного радиомаяка (НРМ), географические координаты которого известны с высокой точностью, и самолётного радиоприемного устройства. Если в радиокомпасных и радиопеленгаторных системах направленными средствами обладают приемные устройства, то в радиомаячных системах, наоборот, наземный радиомаяк излучает радиосигнал, характеристики которого зависят от направления излучения. В качестве НРМ широко используются веерные радиомаяки, которые будут рассмотрены далее, а в качестве приёмных устройств АРК или приёмники самолётных радиостанций связи. Веерные НРМ работают на фиксированных частотах средневолнового диапазона.
Для определений линии положения и места самолёта с помощью радиомаячной угломерной системы используется специальная карта. Точность определения линии положения зависит от времени суток и составляет 0,25…0,5 днем и 1…2 ночью.
2.2. Антенные системы амплитудных радиопеленгаторов
В качестве приемных устройств в угломерных радионавигационных системах чаще всего используются амплитудные радиопеленгаторы. Такие пеленгаторы позволяют определить направление на передающую радиостанцию в зависимости от амплитуды принимаемого сигнала. Этот метод пеленгации основан на направленных свойствах антенных систем, применяемых в радиопеленгаторах. Наиболее широко используется метод пеленгации по минимуму принимаемого сигнала. Это обусловлено наличием в диаграммах направленности антенных систем резко выраженных минимумов («нулей»), в то время как максимумы являются «размытыми». Использование резко выраженных минимумов обеспечивает высокую точность пеленгации.
В бортовых радиопеленгаторах применяются комбинированные антенные системы, основу которых составляет рамочная антенна, обладающая направленными свойствами. Совместно с рамочной антенной в таких системах используется ненаправленная антенна (рис. 2.2в). Применяются следующие разновидности направленных антенн, построенных на базе рамок:
вращающаяся рамочная антенна (рис. 2.2а);
неподвижная рамочная антенна с гониометром (рис. 2.2б);
неподвижная рамочная антенна с квадратурной модуляцией сигналов.



а) б) в)
Рис. 2.2. Рамочная и ненаправленная антенны бортовых радиопеленгаторов:
а) вращающаяся рамочная антенна АРК-11; б) неподвижная рамочная антенна АРК-15; в) вращающаяся рамочная антенная АРК-У2 (1) и ненаправленная антенна АРК-15 (2 – совмещенная с антенной УКВ радиостанции Р-862, 3 – совмещенная с антенной УКВ радиостанции Р-832М)
В наземных радиопеленгаторах применяется антенная система в виде двух разнесенных в пространстве ненаправленных антенн.
Рассмотрим основные свойства указанных антенных систем.
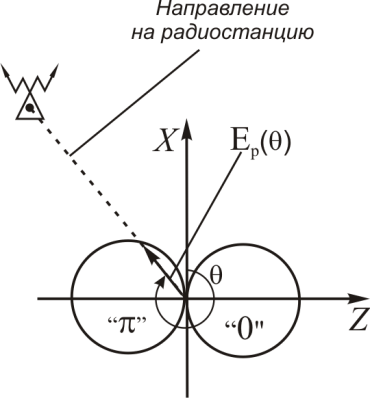 Рамочная
антенна представляет собой несколько
вертикально расположенных витков
электрического проводника, намотанных
на сердечник (рис. 2.3а). Диаграмма
направленности рамочной антенны в
пространстве представляет собой тор,
охватывающий витки рамки, поэтому
сечение диаграммы направленности в
плоскости XOZ,
перпендикулярной виткам рамки,
представляет собой «восьмерку», с четко
выраженными направленным свойствами
(рис. 2.3б). На борту летательного аппарата
вращающаяся рамочная антенна размещается
так, чтобы эта «восьмёрка» формировалась
в горизонтальной плоскости (при
горизонтальном полете летательного
аппарата). В простейшем случае пеленгация
осуществляется по минимуму электродвижущей
силы (ЭДС) ЕР(0)
на зажимах рамочной антенны получаемому
при развороте рамочной антенны.
Минимальное значение ЕР
наблюдается
при совмещении нулевого направления
приема (ось OХ)
с направлением на радиостанцию (рис.
2.3б).
Рамочная
антенна представляет собой несколько
вертикально расположенных витков
электрического проводника, намотанных
на сердечник (рис. 2.3а). Диаграмма
направленности рамочной антенны в
пространстве представляет собой тор,
охватывающий витки рамки, поэтому
сечение диаграммы направленности в
плоскости XOZ,
перпендикулярной виткам рамки,
представляет собой «восьмерку», с четко
выраженными направленным свойствами
(рис. 2.3б). На борту летательного аппарата
вращающаяся рамочная антенна размещается
так, чтобы эта «восьмёрка» формировалась
в горизонтальной плоскости (при
горизонтальном полете летательного
аппарата). В простейшем случае пеленгация
осуществляется по минимуму электродвижущей
силы (ЭДС) ЕР(0)
на зажимах рамочной антенны получаемому
при развороте рамочной антенны.
Минимальное значение ЕР
наблюдается
при совмещении нулевого направления
приема (ось OХ)
с направлением на радиостанцию (рис.
2.3б).
 Второй
особенностью рамочной антенны, кроме
направленных свойств, является зависимость
фазы ЭДС ЕР
от направления
прихода радиоволны: при приеме одного
и того же сигнала разными лепестками
диаграммы направленности, обозначенными
«0» и «π» на рис. 2.3б, наблюдается изменение
фазы на 180
(рис. 2.3в).
Второй
особенностью рамочной антенны, кроме
направленных свойств, является зависимость
фазы ЭДС ЕР
от направления
прихода радиоволны: при приеме одного
и того же сигнала разными лепестками
диаграммы направленности, обозначенными
«0» и «π» на рис. 2.3б, наблюдается изменение
фазы на 180
(рис. 2.3в).
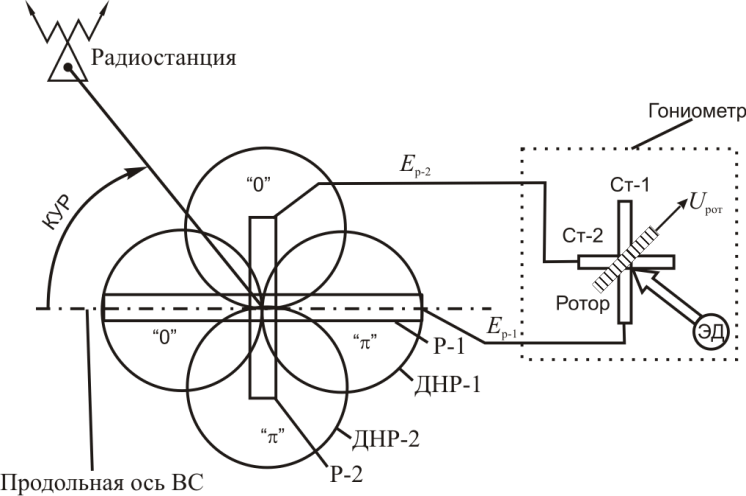
Неподвижная рамочная антенна с гониометром состоит из двух взаимно перпендикулярных рамок Р-1 и Р-2, одна из которых ориентируется вдоль продольной оси летательного аппарата (рис. 2.4а).
Гониометр состоит из двух неподвижных статорных катушек Ст-1 и Ст-2 и находящейся внутри статора поворотной роторной катушки Ротор. Гониометр (рис. 2.5а) размещается в общем с приёмником блоке радиокомпаса (рис. 2.5б) и служит для имитации электромагнитного поля, по направлению совпадающего с полем пеленгуемой радиостанции, и определения этого направления.
а) б)
Рис. 2.4. Неподвижная
рамочная антенна с гониометром: а)
диаграммы направленности рамок (ДНР)
и схема соединений гониометра;
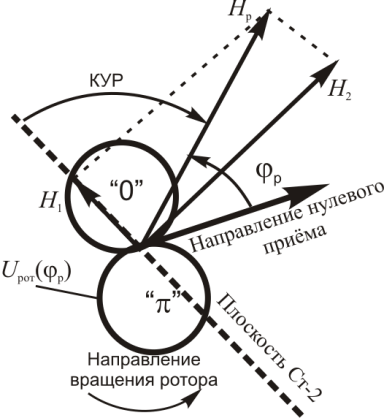
б)
векторная диаграмма магнитных полей
статора гониометра и диаграмма приёма
роторной катушки Uрот(р)

а) б)
Рис. 2.5. Вид спереди блока приёмника радиокомпаса:
а) блок гониометра;
б) блок гониометра в составе приёмника АРК
Статорные катушки Ст-1 и Ст-2 соединяются с соответствующими рамками. Радиосигнал пеленгуемой радиостанции наводит в рамках Р-1 и Р-2 ЭДС Ер-1 и Ер-2. Эти ЭДС передаются на статорные катушки и наводят внутри них магнитные поля напряженностью Н1 и Н2 соответственно (рис. 2.4б). При идентичности каналов обеих рамок (Р-1 и Ст-1; Р-2 и Ст-2) магнитные поля Н1 и Н2 статорных катушек дают результирующее поле Нр, вектор напряженности которого повернут относительно плоскости одной из катушек (например Ст-2) на угол, равный КУР.
Роторная (искательная) катушка гониометра ориентируется с помощью электродвигателя ЭД в этом результирующем магнитном поле Нр и по своим свойствам идентична рассмотренной выше подвижной рамочной антенне.
Неподвижная рамочная антенна с квадратурной модуляцией сигналов отличается отсутствием вращающихся элементов. Такая антенна, как и описанная выше, состоит из двух взаимноперпендикулярных рамок, нагруженных вместо гониометра на схему формирования суммарного сигнала рамочной антенны (рис. 2.6).
 Амплитуды
напряжений на зажимах рамок пропорциональны
синусу и косинусу курсового угла:
Амплитуды
напряжений на зажимах рамок пропорциональны
синусу и косинусу курсового угла:
![]()
где A1 – амплитуда напряженности магнитного поля радиоволны, ωс – угловая частота радиоволны.
Эти напряжения поступают на балансные модуляторы, в которых осуществляется их умножения на опорные напряжения Uоп1 = cosΩt, Uоп2 = sinΩt. При этом на выходах балансных модуляторов образуются напряжения
![]()
![]()
Опорные напряжения Uоп1 и Uоп2 отличаются по фазе на 90, т.е. являются ортогональными (квадратурными) напряжениями. Поэтому процесс преобразования сигналов в балансных модуляторах называют квадратурной модуляцией, т.е. модуляцией взаимоортогональными сигналами.
В результате векторного суммирования этих напряжений образуется суммарное напряжение U
![]() .
(2.1)
.
(2.1)
Из последнего выражения видно, что значение курсового угла радиостанции определяет начальную фазу амплитуды Um напряжения на выходе сумматора.
Следовательно, для измерения КУР необходимо измерить фазу напряжения Um относительно фазы опорного напряжения.
Рамочные антенны данного типа используются в современных автоматических радиокомпасах. Их достоинством является полное отсутствие механических вращающихся элементов, высокая точность измерения, однако при этом существенно усложняется электронная часть измерительного тракта.
 Разнесенные
антенны состоят
из двух ненаправленных вертикальных
вибраторов Ант1
и Ант2
(рис. 2.7). Расстояние d
между вибраторами выбирается значительно
меньше длины волны принимаемого сигнала.
Вибраторы включаются в противофазе.
Диаграмма направленности такой антенны
системы аналогична диаграмме направленности
рамочной антенны, что обеспечивает
возможность пеленгации источников
радиоизлучения. Достоинство
таких антенн – отсутствие поляризационных
ошибок пеленгования. Недостаток
– малое значение действующей высоты,
что приводит к необходимости значительного
увеличения геометрических размеров
антенны. Поэтому разнесенные антенные
системы применяются в наземных
пеленгаторах.
Разнесенные
антенны состоят
из двух ненаправленных вертикальных
вибраторов Ант1
и Ант2
(рис. 2.7). Расстояние d
между вибраторами выбирается значительно
меньше длины волны принимаемого сигнала.
Вибраторы включаются в противофазе.
Диаграмма направленности такой антенны
системы аналогична диаграмме направленности
рамочной антенны, что обеспечивает
возможность пеленгации источников
радиоизлучения. Достоинство
таких антенн – отсутствие поляризационных
ошибок пеленгования. Недостаток
– малое значение действующей высоты,
что приводит к необходимости значительного
увеличения геометрических размеров
антенны. Поэтому разнесенные антенные
системы применяются в наземных
пеленгаторах.
Особенностью применения рамочных антенн является возможная ошибка пеленгации на 180. Из рис. 2.8 видно, что сигнал на зажимах рамки достигает минимума при двух возможных ее положениях, отличающихся разворотом рамки на 180.
Положение
рамки передается на стрелку указателя
курсовых углов, которая показывает либо
истинный КУР (рис. 2.8а), либо с ошибкой
на 180
(рис. 2.8б). Для автоматического устранения
неоднозначности определения КУР
совместно с рамочными антенными системами
любого типа используются ненаправленные
антенны. Диаграмма направленности такой
антенны в горизонтальной плоскости
представляет собой окружность (рис.
2.9), причем фаза сигнала на выходе антенны
не зависит от направления прихода
радиоволны. Используя это свойство и
сравнивая фазу сигнала на выходе рамки
и ненаправленной антенны, можно определить
положение лепестков «0» и «»
д иаграммы
направленности рамки.
иаграммы
направленности рамки.
Положим, что при «правильной» пеленгации «0» лепесток должен находиться справа от направления на пеленгуемую радиостанцию. В соответствии с этим, при совпадении фаз на выходе рамки и ненаправленной антенны система управления должна довернуть рамку вправо до ближайшего минимума (рис. 2.10а). Если же фазы противоположны (рис. 2.10б), то система управления должна довернуть рамку влево от ближайшего минимума. При достижении минимума рамка останавливается, при этом стрелка на указателе курсовых углов показывает соответствующий КУР.
2.3. Ошибки в определении радиопеленгов
При определении направления на передающую радиостанцию в радиопеленгаторах возникают ошибки. Часть ошибок определяется условиями распространения радиоволн. Это ошибки берегового и горного эффектов, и, так называемые, поляризационные ошибки ночного эффекта. Другие ошибки возникают за счет переотражения радиоволн близлежащими объектами (например, корпусом самолета) и интерференции вторичной и исходной радиоволн. Такая ошибка называется радиодевиацией.
Береговым эффектом называется явление преломления радиоволн, то есть изменения направления их распространения, происходящее на границе «суша-море» (рис. 2.11). Это явление вызвано тем, что электрические проводимости суши и водной поверхности различны. Различны также и коэффициенты поглощения электромагнитной энергии
указанными средами.
Н аибольшие
ошибки возникают тогда, когда угол между
береговой чертой и направлением
распространения радиоволны мал. Если
же передающая радиостанция расположена
так, что электромагнитная волна пересекает
береговую черту под прямым углом, то
ошибка равна нулю. Ошибки, вызванные
береговым эффектом, могут достигать
5…7.
аибольшие
ошибки возникают тогда, когда угол между
береговой чертой и направлением
распространения радиоволны мал. Если
же передающая радиостанция расположена
так, что электромагнитная волна пересекает
береговую черту под прямым углом, то
ошибка равна нулю. Ошибки, вызванные
береговым эффектом, могут достигать
5…7.
Д ля
уменьшения этих ошибок штурман должен
выбирать радиостанции таким образом,
чтобы угол пересечения линии пеленга
с береговой чертой был больше 20.
Кроме того, ошибки, вызванные береговым
эффектом, уменьшаются с подъемом на
большую высоту.
ля
уменьшения этих ошибок штурман должен
выбирать радиостанции таким образом,
чтобы угол пересечения линии пеленга
с береговой чертой был больше 20.
Кроме того, ошибки, вызванные береговым
эффектом, уменьшаются с подъемом на
большую высоту.
Горный эффект обусловлен явлением дифракции (рис. 2.12), то есть огибания радиоволной препятствий (горных вершин, возвышенностей и т.п.), размеры которых соизмеримы с длиной волны. Ошибки, вызванные горным эффектом, достигают 8…10.
Для уменьшения ошибок этого вида необходимо использовать такую радиостанцию, чтобы на линии ее пеленга было меньше различных возвышенностей. Ошибки также уменьшаются с увеличением высоты полета: при высоте полета самолета в 1,5 раза превышающей высоту горы, влиянием горного эффекта можно пренебречь.
Ночной
эффект (или
поляризационные ошибки) возникает при
приёме рамочной антенной радиоволн,
имеющих поляризацию, отличающуюся от
вертикальной (нормальной). Вектор
![]() напряженности электрического поля в
этом случае не перпендикулярен плоскости
горизонта (рис. 2.13).
напряженности электрического поля в
этом случае не перпендикулярен плоскости
горизонта (рис. 2.13).
Если
бы принималась только вертикально
поляризационная волна
![]() ,
то ЭДС
,
то ЭДС
![]() наводилась
бы только в вертикальных проводниках
рамки и поляризационная ошибка
отсутствовала бы. Однако наличие
горизонтальных составляющих поля
наводилась
бы только в вертикальных проводниках
рамки и поляризационная ошибка
отсутствовала бы. Однако наличие
горизонтальных составляющих поля
![]() и
и
![]() приводит к их воздействию на горизонтальные
проводники рамки, в результате чего в
них наводится ЭДС
приводит к их воздействию на горизонтальные
проводники рамки, в результате чего в
них наводится ЭДС
![]() ,
отличная от нуля, которая, складываясь
с
,
отличная от нуля, которая, складываясь
с
![]() (
(![]() ),
приводит к изменению результирующей
ЭДС
.
Д
),
приводит к изменению результирующей
ЭДС
.
Д иаграммы
направленности рамки для составляющих
поля
иаграммы
направленности рамки для составляющих
поля
![]() и
и
![]() ортогональны (рис. 2.14). В результате их
сложения, происходит смещение нуля
результирующей диаграммы направленности
ортогональны (рис. 2.14). В результате их
сложения, происходит смещение нуля
результирующей диаграммы направленности
![]() ,
следовательно, возникает ошибка
пеленгации .
Поляризационные ошибки увеличиваются
ночью, особенно в сумерки при заходе и
восходе Солнца, за счет существенного
увеличения интенсивности пространственной
волны. Д
,
следовательно, возникает ошибка
пеленгации .
Поляризационные ошибки увеличиваются
ночью, особенно в сумерки при заходе и
восходе Солнца, за счет существенного
увеличения интенсивности пространственной
волны. Д нем
она поглощается ионосферой, а ночью
отражается (рис. 2.15) и, складываясь в
точке приёма с поверхностной волной,
приводит к развороту плоскости
поляризации принимаемой суммарной
радиоволны.
нем
она поглощается ионосферой, а ночью
отражается (рис. 2.15) и, складываясь в
точке приёма с поверхностной волной,
приводит к развороту плоскости
поляризации принимаемой суммарной
радиоволны.
Вследствие случайной поляризации пространственной волны, возникающей при отражении от ионосферы, поляризация поля в точке приёма непрерывно изменяется.
Поляризационная
ошибка пеленгации может достигать 8…10
и сопровождается большими колеб
Рис. 2.14. Диаграмма
направленности
![]() рамки
при приёме дополнительно не вертикально
поляризованной радиоволны
рамки
при приёме дополнительно не вертикально
поляризованной радиоволны
 Для
уменьшения поляризационных ошибок
можно рекомендовать следующие меры:
Для
уменьшения поляризационных ошибок
можно рекомендовать следующие меры:
рационально выбирать радиостанцию для пеленгования (более мощную, находящуюся на более близком расстоянии и работающую на более низкой частоте);
усреднить показания радиокомпаса;
использовать наземные радиопеленгаторы, т.к. применяемые в них разнесенные антенны значительно меньше подвержены влиянию ночного эффекта.
2.4. Радиодевиация и способы её компенсации
 При
переотражении падающей радиоволны
напряженностью
При
переотражении падающей радиоволны
напряженностью ![]() корпусом самолёта, возникает вторичная
радиоволна с вектором напряженности
электрического поля
корпусом самолёта, возникает вторичная
радиоволна с вектором напряженности
электрического поля
![]() ,
поляризация которого отличается от
вертикальной. Кроме того, направление
распространения переотраженной
радиоволны отличается от направления
распространения исходной радиоволны.
,
поляризация которого отличается от
вертикальной. Кроме того, направление
распространения переотраженной
радиоволны отличается от направления
распространения исходной радиоволны.
На рамочную антенну воздействует суммарное поле первичной и вторичной радиоволн, в результате чего появляется ошибка в измерении пеленга. При этом поворотная рамочная антенна (роторная катушка гониометра) отклоняется от истинного положения пеленга и устанавливается на положение пеленга суммарной радиоволны.
Ошибка в измерении пеленга, которая возникает за счет воздействия на рамочную антенну переизлученной радиоволны, называется радиодевиацией и обозначается Р (рис. 2.16).
К оличественно
радиодевиация равна углу Р
между направлением на приводную
радиостанцию, определенным с помощью
радиокомпаса (ОРК
отсчет радиокомпаса), и истинным
направлением на нее – КУР). Рассмотрим
зависимость радиодевиации от направления
прихода радиоволны.
оличественно
радиодевиация равна углу Р
между направлением на приводную
радиостанцию, определенным с помощью
радиокомпаса (ОРК
отсчет радиокомпаса), и истинным
направлением на нее – КУР). Рассмотрим
зависимость радиодевиации от направления
прихода радиоволны.
На
рис. 2.17 показано, что поле радиоволны
имеет в точке приёма напряженность
![]() ,
проекция которой на оси координат равны
,
проекция которой на оси координат равны
![]() и
и
![]() .
Вследствие
переизлучения радиоволны и суммирования
первичной и вторичной волн эти проекции
получают приращение
.
Вследствие
переизлучения радиоволны и суммирования
первичной и вторичной волн эти проекции
получают приращение![]() и
и
![]() ,
соответственно. Исследования показали,
что
значительно больше
,
поэтому векторы результирующей волны
,
соответственно. Исследования показали,
что
значительно больше
,
поэтому векторы результирующей волны
![]() не
совпадают с
возникает ошибка радиодевиации.
не
совпадают с
возникает ошибка радиодевиации.
Из
рис. 2.17 видно, что если направления
прихода радиоволны 0
или 180, то
![]() ,
при этом
также
равно 0 и
,
при этом
также
равно 0 и
![]() совпадает
с
совпадает
с
![]() ,
аналогично, если КУР=90
или 270, то
,
аналогично, если КУР=90
или 270, то
![]() ,
,
![]() и
совпадает
с
.
Таким образом, для КУР равных 0,
90, 180,
270 радиодевиация
равна нулю. Максимальное значение
радиодевиации Р
наблюдается при Кур
равных 45, 135,
225, 315
и может достигать 20.
Следовательно, кривая радиодевиации
имеет периодический четвертной характер
(рис. 2.18).
и
совпадает
с
.
Таким образом, для КУР равных 0,
90, 180,
270 радиодевиация
равна нулю. Максимальное значение
радиодевиации Р
наблюдается при Кур
равных 45, 135,
225, 315
и может достигать 20.
Следовательно, кривая радиодевиации
имеет периодический четвертной характер
(рис. 2.18).
График радиодевиации часто строят в полярной системе координат относительно опорной окружности (рис. 2.19).
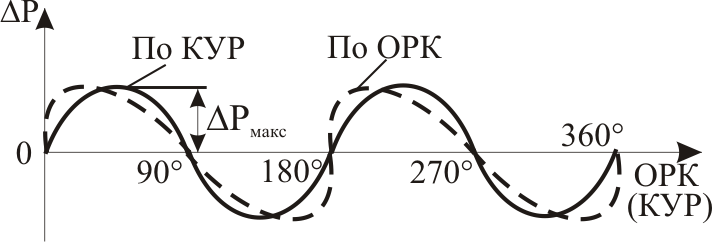
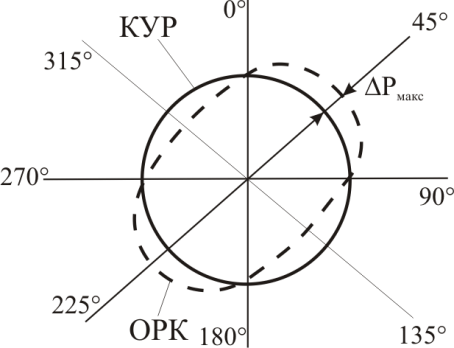
Рис. 2.18. График
радиодевиации в прямоугольной системе
координат
Рис. 2.19. График
радиодевиации в полярной системе
координат
Радиодевиационная ошибка индивидуальна для каждого конкретного ВС, так как определяется свойствами его корпуса. Теоретически рассчитать значение радиодевиации невозможно. Ее определяют опытным путем. Процесс определения радиодевиации и составления её графика носит название списывание радиодевиации. Списывание радиодевиации производится для каждого ВС один раз в год. На основе полученного графика осуществляют компенсацию радиодевиации. Для компенсации радиодевиации применяют электрический и механический способы.
Электрический
способ компенсации используется в
радиокомпасах, имеющих невращающуюся
рамочную антенну. Этот способ заключается
в следующем. Так как радиодевиация
возникает из-за неравенства приращений
и
(рис.
2.17), то можно попытаться выровнять эти
приращения. Такое выравнивание достигается
за счет разной действующей высоты
(разных размеров) взаимоперпендикулярных
рамок, составляющих неповоротную
рамочную антенну. Увеличение действующей
высоты приводит к увеличению приращения
![]() .
Выше было указано, что
.
Выше было указано, что
![]() ,
поэтому для увеличения
необходимо увеличить размеры рамки,
располагающейся вдоль продольной оси
самолёта. Перпендикулярная ей рамка
будет иметь соответственно, меньшие
размеры.
,
поэтому для увеличения
необходимо увеличить размеры рамки,
располагающейся вдоль продольной оси
самолёта. Перпендикулярная ей рамка
будет иметь соответственно, меньшие
размеры.
Электрический способ компенсации не дает полной компенсации Р, поэтому, наряду с этим, осуществляют определение остаточной радиодевиации и её компенсацию на каждом самолёте электронным способом (в радиокомпасах с подвижной рамочной антенной и квадратурной модуляцией сигналов) или механическим способом (в радиокомпасах с неподвижной рамочной антенной и гониометром). В обоих случаях получают график радиодевиации (то есть производят списывание радиодевиации) (рис. 2.18), который затем вводят в электронное или механическое запоминающее устройство, соответственно.
Получаемые с помощью указанных запоминающих устройств поправки Р добавляются в измеренному радиокомпасом значению ОРК:
КУР = ОРК ± Р.
В результате на указатель выдается точное значение КУР. При электронном способе это суммирование осуществляется в цифровом виде, т.е. ОРК и Р представляются в виде чисел.
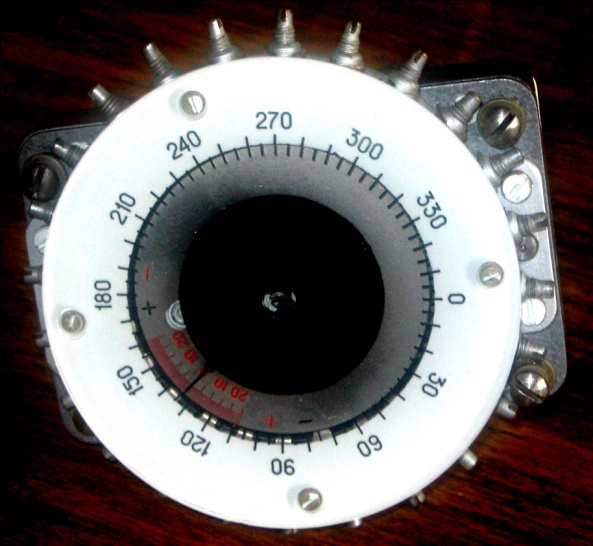
Механический способ компенсации основан на дополнительном повороте стрелки указателя курсовых углов относительно роторной катушки гониометра (или подвижной рамочной антенны). При этом механическое запоминающее устройство (механический компенсатор Р) представляет собой стальную ленту в форме кольца (лекало), форму которого можно изменять в соответствии с Р. Для этого предназначены винты, расположенные по окружности через 15 (всего 24 винта), как показано на рис. 2.20.
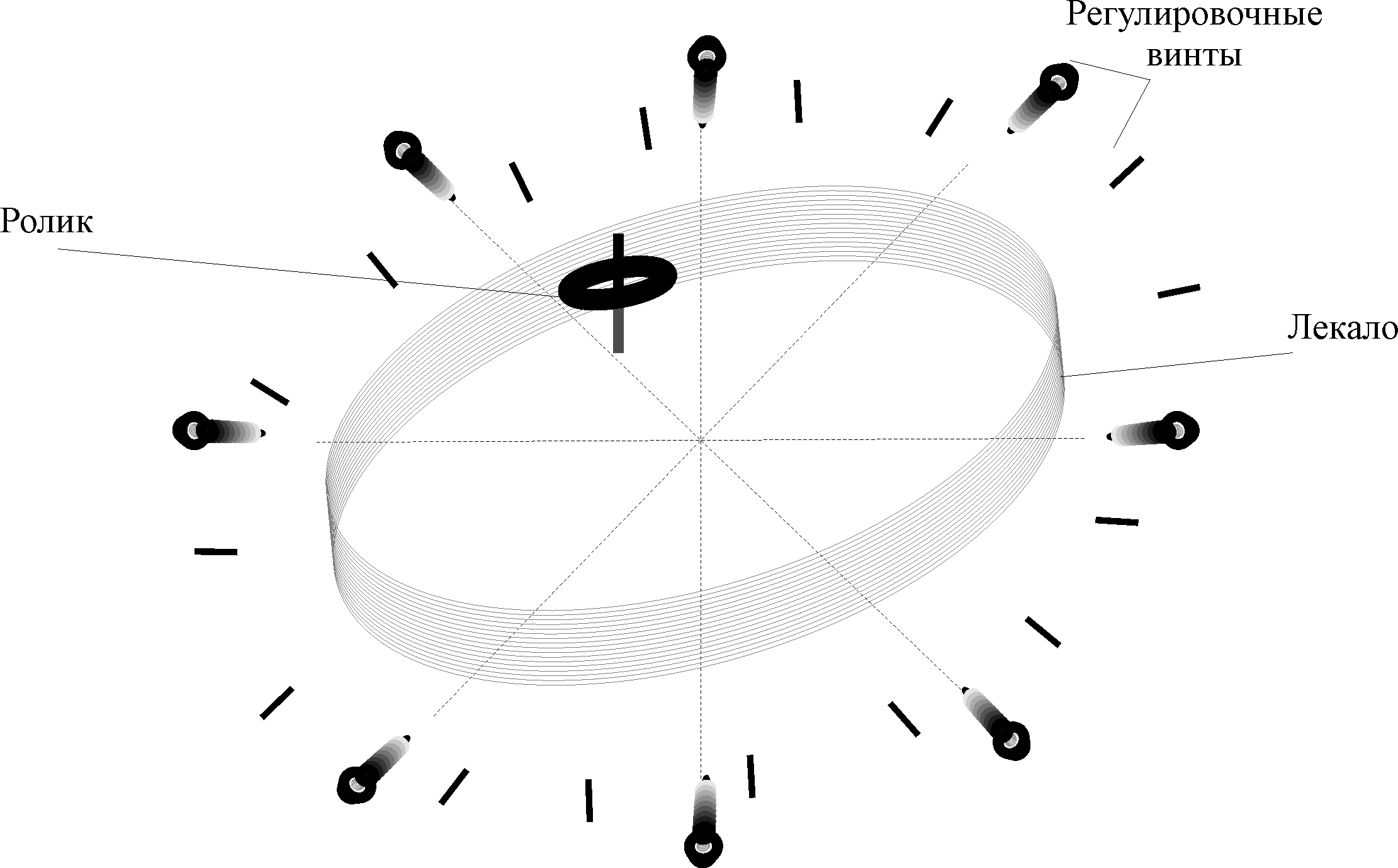
Рис. 2.20. Запоминающее лекало механического компенсатора радиодевиации
По внутренней поверхности лекала скользит ролик, с помощью которого вводится поправка в показания указателя КУР на величину Р. Кроме того, с роликом связана шкала поправок, по которой можно производить отсчёт Р. После ввода значений Р в механическое запоминающее устройство лекало принимает форму графика радиодевиации в полярной системе координат (см. рис. 2.19).
2.5. Основные параметры бортовых автоматических радиокомпасов
К основным параметрам автоматических радиокомпасов относятся:
предельная чувствительность по приводу;
предельная чувствительность по пеленгу;
дальность действия;
погрешность измерения пеленга.
Предельной чувствительностью по приводу называют тот минимальный сигнал, который, хотя и не обеспечивает высокой точности пеленгования, но позволяет использовать АРК для вывода ВС на радиостанцию. Предельную чувствительность по приводу характеризуют напряженностью поля в точке приема, при которой погрешность АРК не превышает ±10 при амплитуде колебаний стрелки индикатора КУР не более 3.
Предельной чувствительностью по пеленгу называют тот минимальный сигнал, который обеспечивает достаточную точность пеленгования, например для определения местоположения ВС. Предельную чувствительность по пеленгу характеризуют напряженностью поля, при которой максимальная погрешность не превышает ±3 и амплитуда колебаний стрелки меньше 2.
Дальность действия АРК существенно зависит от мощности пеленгуемой радиостанции, высоты полета, длины волны, времени суток и от расположения антенн на самолете.
Погрешность измерения пеленга характеризует точность измерения при определенных условиях приема под воздействием помех.
2.6. Принцип действия автоматических радиокомпасов
Принцип действия АРК основан на сравнении амплитуд и фаз сигналов, принятых от направленной и ненаправленной антенн.
2.6.1. Принцип действия АРК с поворотной рамочной антенной
Упрощенная структурная схема АРК с поворотной рамочной антенной представлена на рис. 2.21.
По структурной схеме он представляет собой замкнутую следящую систему, приводящую к нулю значения угла рассогласования между осью диаграммы направленности рамочной антенны и направлением на пеленгуемую радиостанцию. Рассмотрим принцип действия по структурной схеме с учетом графиков, показанных на рис. 2.22, которые соответствуют трём различным положениям рамочной антенны.
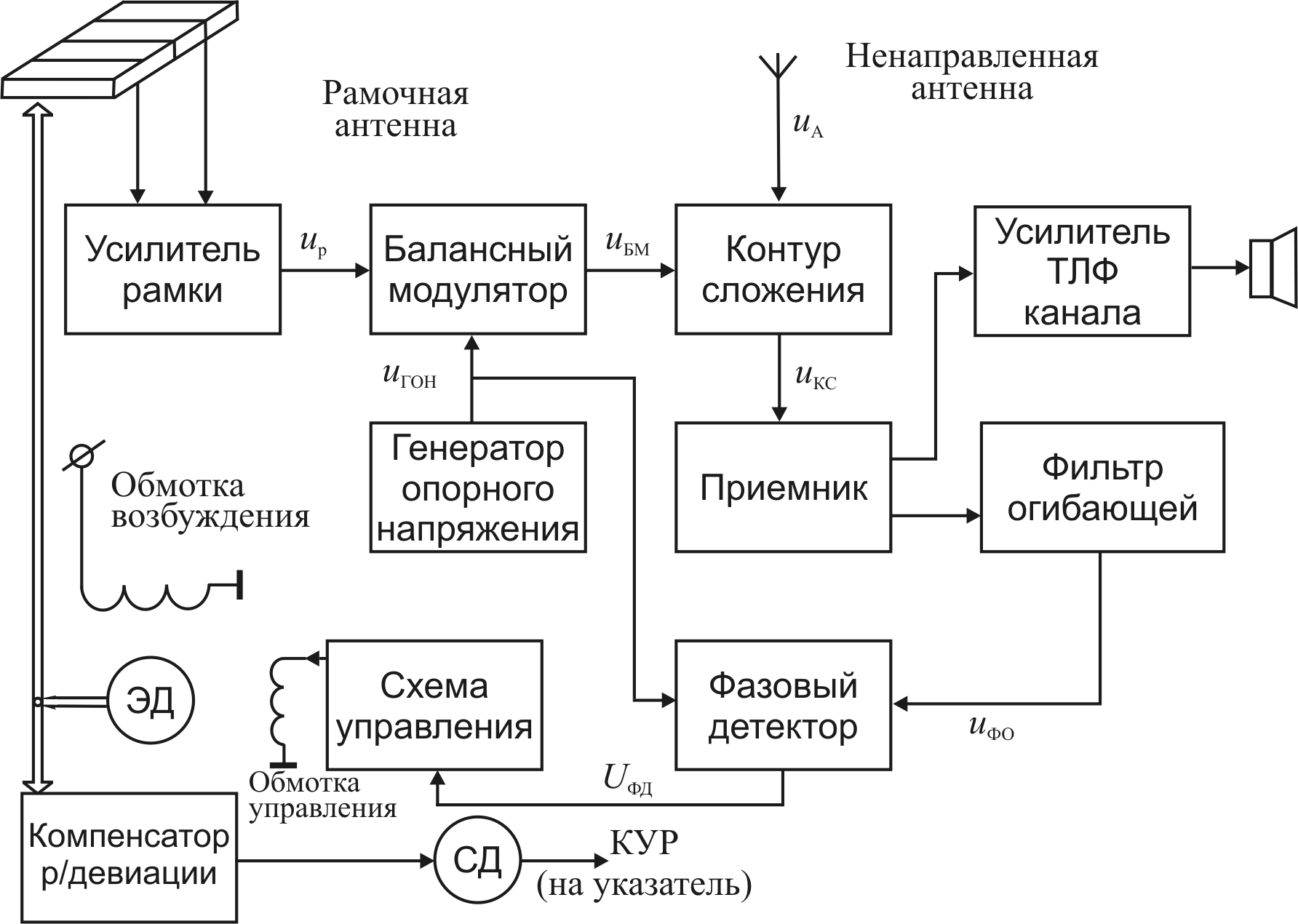
Рис. 2.21. Упрощенная структурная схема АРК с поворотной рамочной антенной (ЭД – электродвигатель, СД – сельсин-датчик)
Принятый по каналу рамочной антенны сигнал усиливается усилителем рамки и, как видно из графиков up, его амплитуда и фаза зависят от направления прихода радиоволны.
В то же время, амплитуда и фаза сигнала принятого ненаправленной антенной (графики uA), не зависят от направления прихода радиоволны.
Напряжение uA используют в качестве опорного для определения фазы сигнала рамки. С этой целью up подвергается балансной модуляции с помощью генератора опорного напряжения, который вырабатывает низкочастотное (Fгон – несколько десятков герц) опорное напряжение uгон. Из графиков на рис. 2.22 видно, что напряжение uБМ на выходе балансного модулятора меняет фазу на 180 при изменении полярности uгон.
Напряжение uБМ суммируется в контуре сложения с напряжением uА. Из графиков видно, что при совпадении фаз uБМ и uА имеет место увеличение суммарной амплитуды, а при противоположных фазах (φ =180) – уменьшение. Таким образом, на выходе контура сложения формируется амплитудно-модулированное напряжение uкс, причем глубина амплитудной модуляции пропорциональна величине отклонения нулевого направления приема рамки от направления на радиостанцию. Если эти направления совпадают (средние графики на рис. 2.22), то амплитудная модуляция отсутствует (из-за отсутствия сигнала на выходе рамки).
Из графиков также видно, что фазы напряжения uгон и огибающей напряжения uкс совпадают, если совпадают фазы напряжений up и uА. Если up и uА имеют противоположные фазы, то противоположны и фазы напряжений uгон и огибающей напряжения uкс.
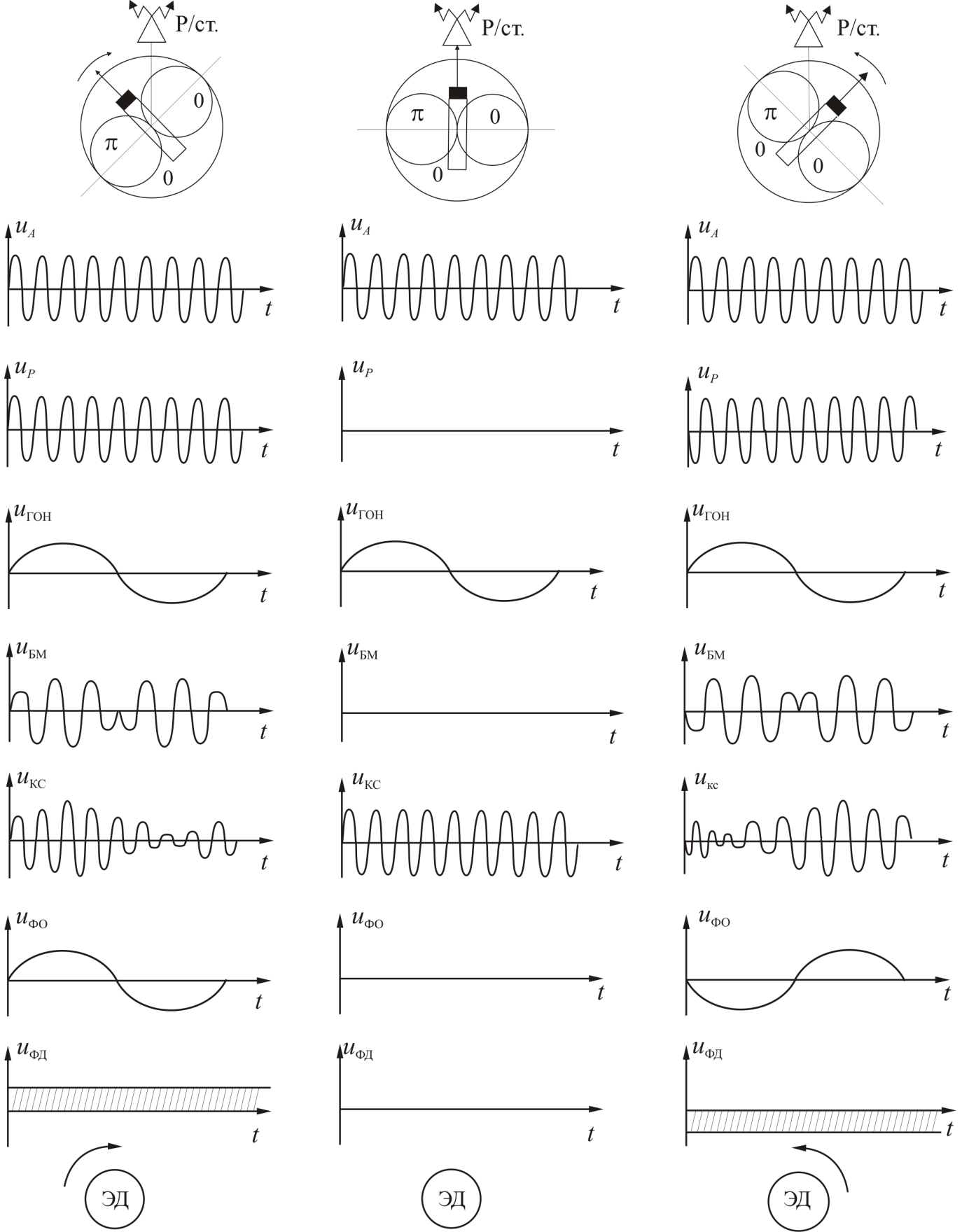
Рис. 2.22. Графики сигналов, поясняющие принцип действия АРК
Суммарный сигнал поступает в приемник, имеющий два выхода:
на телефонном выходе выделяется сигнал позывных приводной радиостанции, который можно прослушать с помощью телефонов;
на компасном выходе с помощью фильтра огибающей выделяется сигнал огибающей напряжения uкс, показанный на графиках uфо рис. 2.22.
Напряжения uгон и uфо, имеющие одинаковую частоту Fгон, поступают на фазовый детектор. Напряжение uфд на выходе фазового детектора положительно, если uгон и uфо совпадают по фазе, отрицательно, если uгон и uфо имеют противоположные фазы. Модуль ׀uфд׀ соответствует амплитуде сигнала uфо.
Таким образом, полярность напряжения на выходе фазового детектора определяется фазой сигнала на выходе рамочной антенны и указывает, фактически, каким лепестком диаграммы направленности рамочной антенны осуществляется приём.
Напряжение uфд преобразуется с помощью схемы управления в переменное напряжение частотой F = 400 Гц, фаза которого определяется полярностью uфд. Это напряжение подается на управляющую обмотку электродвигателя ЭД, который является асинхронным двигателем переменного тока. Направление его вращения определяется фазой напряжения на управляющей обмотке, то есть, как следует из вышесказанного, фазой сигнала на выходе рамочной антенны. Двигатель вращает рамочную антенну до тех пор, пока не станет равным нулю напряжение на управляющей обмотке, то есть пока напряжение на выходе рамки не станет равным нулю. При этом автоматически устраняется неоднозначность пеленгации (см. п. 2.2.).
Угловое положение антенны после компенсации радиодевиации в механическом компенсаторе радиодевиации через сельсин-датчик СД передается на стрелку указателя курсовых углов (КУР). Стрелка указателя КУР вращается синхронно с антенной и непрерывно отслеживает текущее значение КУР, который отсчитывается по соответствующей шкале указателя курсовых углов.
2.6.2. Принцип действия АРК с неповоротной рамочной антенной и гониометром
Принцип действия АРК отличается от изложенного выше практически только тем, что роль поворотной рамочной антенны выполняет роторная катушка гониометра. Упрощенная структурная схема такого АРК показана на рис. 2.23.
Из сравнения схем на рис. 2.21 и рис. 2.23 видно, что управление электродвигателем в более современном АРК с гониометром существенно упрощено. Частота опорного напряжения uгон такого АРК выше, чем в АРК с поворотной рамочной антенной, поэтому оказалось возможным запитывать электродвигатель непосредственно от генератора опорного напряжения и фильтра огибающей. При этом электродвигатель одновременно выполняет и функции фазового детектора: вращается в ту или другую сторону в зависимости от соотношения фаз напряжений на обмотках возбуждения и управления.
В остальном принцип действия АРК с гониометром аналогичен принципу действия АРК с поворотной рамочной антенной.
Рис. 2.23 Упрощенная
структурная схема АРК с неповоротной
рамочной антенной и гониометром
Передача углового положения ротора гониометра на указатель курсовых углов радиостанции осуществляется через вращающийся трансформатор (ВТ), аналогичный по своим функциям сельсин-датчику.
2.6.3. Принцип действия АРК с неповоротной рамочной антенной и квадратурной модуляцией сигналов
АРК этого типа являются наиболее современными и перспективными радиокомпасами. Измерительный тракт таких АРК не содержит механических элементов. Определение КУР осуществляется цифровыми методами с помощью специализированного цифрового вычислительного устройства, входящего в состав АРК. При этом обеспечивается выдача КУР в аналоговом виде (на стрелку указателя курсовых углов) и в цифровом виде – для автоматического использования в бортовой ЭВМ навигационного комплекса самолета.
Упрощенная структурная схема АРК с неповоротной рамочной антенной и квадратурной модуляцией сигналов показана на рис. 2.24.
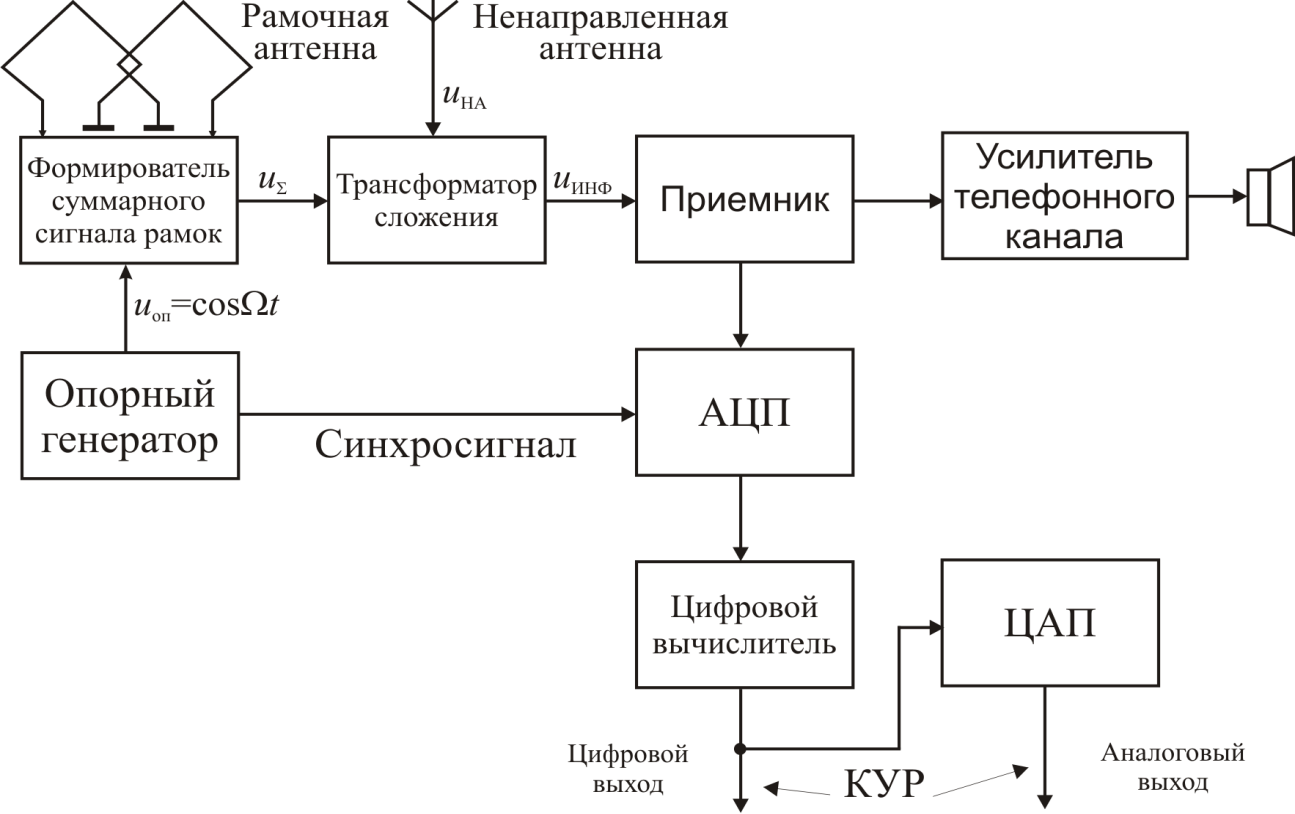
Рис. 2.24. Упрощенная структурная схема АРК с неповоротной рамочной антенной и квадратурной модуляцией
Как
видно из рис. 2.24, радиокомпас построен
по разомкнутой схеме определения
направления прихода принимаемого
сигнала (отсутствует обратная связь по
курсовому углу). Основным принципом
работы такой схемы является формирование
на входе приёмника радиокомпаса
модулированного информационного
сигнала, фазовый сдвиг низкочастотной
огибающей которого относительно опорного
сигнала uoп
равен КУР. Информационный сигнал uинф
образуется в трансформаторе сложения
как сумма сигнала от ненаправленной
антенны
![]() и суммарного сигнала рамок uΣ
(2.1):
и суммарного сигнала рамок uΣ
(2.1):
uинф = А1sin(Ωt + КУР) cosct + А2cosct = А2(1 + msin(Ωt + КУР)) cosct, (2.2)
где m = А1/А2 – коэффициент амплитудной модуляции.
Следовательно, информационный сигнал uинф образуется также, как суммарный сигнал uкс в описанных выше радиокомпасах. Этим обеспечивается учет сигнала ненаправленной антенны, фаза которого не зависит от направления прихода радиоволны, необходимого для автоматического устранения неоднозначности пеленгации. Отличие состоит в том, что огибающая сигнала uкс совпадает или противоположна по фазе с опорным сигналом uгон (см. рис. 2.22). В то же время, огибающая сигнала uинф, как видно из выражения (2.2), сдвинута по фазе относительно опорного напряжения sinΩt на угол, равный КУР. Это объясняется применением другого метода формирования рамочного сигнала.
После прохождения приёмо-усилительного тракта и детектирования сигнал низкочастотной огибающей (курсовой сигнал) преобразуется с помощью аналого-цифрового преобразователя (АЦП) в цифровую форму и поступает в цифровой вычислитель.
В цифровом вычислителе по специальным программам обеспечивается выполнение процедур фазового измерения КУР, коррекции радиодевиационной ошибки, управления, контроля за работой всех функциональных узлов радиокомпаса и др. Измеренное значение КУР в цифровой форме выдается в бортовую ЭВМ навигационного комплекса самолета. Кроме того, после преобразования в аналоговую форму в цифро-аналоговом преобразователе (ЦАП), значение КУР выдается на соответствующий стрелочный указатель.
Так же, как и в рассмотренных ранее радиокомпасах, на телефонном выходе приёмника выделяется сигнал позывных приводной радиостанции, который можно прослушать с помощью телефонов.
2.7. Наземные средства угломерных систем
2.7.1. Приводные аэродромные станции
Приводные радиостанции являются наземным оборудованием радиокомпасной угломерной радионавигационной системы и представляют собой радиопередающее устройства, работающие в диапазоне средних волн (СВ).
Приводные радиостанции предназначены для совместной работы с автоматическими радиокомпасами.
В зависимости от решаемых задач и расположения на местности приводные радиостанции подразделяются на: отдельные и аэродромные посадочные.
Отдельные приводные радиостанция устанавливаются в определенных точках на местности, маркирующих входы и выходы воздушных коридоров, воздушных зон или пунктов излома воздушных трасс, и предназначены для самолетовождения на маршрутах и привода самолетов в соответствующие радионавигационные точки.
Аэродромные посадочные приводные радиостанции устанавливаются в зоне аэродрома на продолжении оси взлетно-посадочной полосы и предназначены для привода самолетов на аэродром посадки и обеспечения последующего предпосадочного маневра с выдерживанием посадочного курса.
Аэродромные посадочные приводные радиостанции (ПАР) входят в состав оборудования системы посадки (ОСП), изучаемой в учебной дисциплине «Связь и радиосветотехническое оборудование аэродромов». Различают дальние и ближние приводные радиостанции (ДПРС и БПРС), которые размещаются на удалениях от начала взлетно-посадочной полосы (4 000 ± 200 м) и (850…1 200 м), соответственно, как показано на рис. 2.25.
Современные приводные радиостанции различаются по уровню излучаемой мощности, степени стабилизации несущей частоты и уровню автоматизации. По уровню излучаемой мощности их можно условно разделить на три группы:
большой мощности;
средней мощности;
малой мощности.
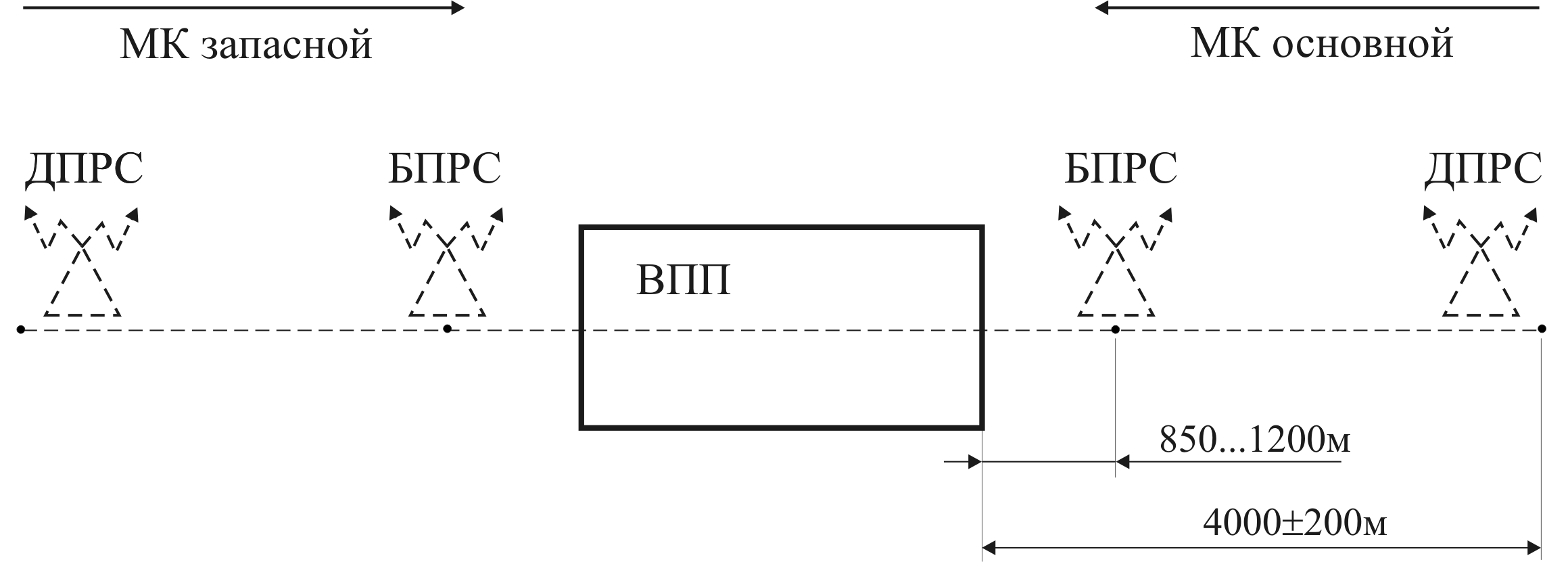
Рис. 2.25. Размещение ДПРС и БПРС на аэродроме (МК – магнитный курс)
Приводные радиостанции большой мощности конструируются в стационарном варианте. Их роль могут выполнять широковещательные радиостанции (ШВРС). При работе в качестве приводных радиостанций они периодически (один раз в минуту) передают тональный телеграфный сигнал, наложенный на вещательную программу.
Приводные радиостанции средней мощности выпускаются в стационарном и подвижном вариантах. К ним относятся приводные радиостанции типов ПАР-8С, ПАР-8СА, ПАР-8СС, ПАР-9М2, ПАР-10.
Приводные радиостанции малой мощности выпускаются, в основном, в подвижном варианте и используются, преимущественно, в качестве БПРС. К ним относятся проводные радиостанции типов ПАР-9М, ПАР-9МА.
Основу любой приводной радиостанции составляют передатчик и ненаправленная антенна. В состав автоматизированных приводных радиостанций входят два передатчика, один из которых является резервным и включается при отказе основного передатчика с помощью специальной аппаратуры автоматики.
Упрощенная структурная схема приводной радиостанции показана на рис. 2.26. Передатчик состоит из высокочастотного тракта и тракта звуковой частоты. Элементы управления, контроля и автоматики на схеме не показаны. Тракт высокой частоты обеспечивает формирование сетки рабочих частот в заданном диапазоне и формирование номинального уровня выходной мощности излучаемого сигнала.
Тракт звуковой частоты предназначен для модуляции и манипуляции высокочастотных колебаний от автомата позывных сигналов, телеграфного ключа, магнитофона, которые подключаются к модулятору с помощью коммутатора в соответствующем режиме работы приводной радиостанции. Тональный генератор обеспечивает получение синусоидальных колебаний низкой частоты в момент нажатия телеграфного ключа или срабатывания автомата позывных сигналов. С помощью тракта звуковой частоты обеспечивается формирование позывных сигналов или другой информации, которую необходимо передать с помощью приводной радиостанции.
Приводные радиостанции могут работать на привод и на связь. основным режимом является работа на привод, которая осуществляется в телеграфном или телефонном режиме. В телеграфном режиме обеспечивается большая дальность действия благодаря более полному использованию мощности передатчика.
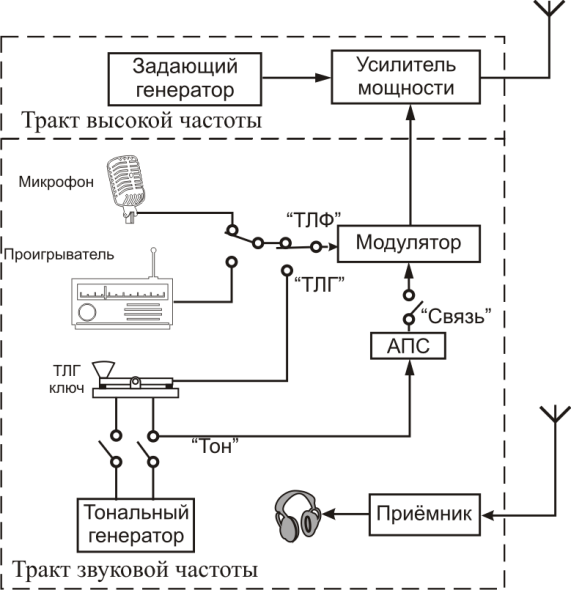
Рис. 2.26. Упрощенная структурная схема приводной радиостанции
В зависимости от режима излучения (телеграф или телефон) должен быть включён и соответствующий режим работы автоматического радиокомпаса («ТЛГ» или «ТЛФ»).
При работе на привод в любом режиме колебания несущей частоты не прерываются, что обеспечивает устойчивую работу АРК.
Работа на связь используется для передачи информации на самолёты в случае отказа самолётных или наземных командных радиостанций. Этот канал связи называется «ПРС-АРК». При работе на связь передатчик приводной радиостанции может работать в телеграфном режиме (с разрывом несущей) или в телефонном режиме.
Наличие в составе приводной радиостанции приёмника средневолнового диапазона и УКВ командной радиостанции позволяет использовать её в качестве связной радиостанции средневолнового диапазона для передачи и приёма информации между штабами, а также для ретрансляции команд с командно-диспетчерского пункта (КДП) на борт летательного аппарата при отказе бортовой командной радиостанции самолёта.
Назначение и задачи, решаемые аэродромной посадочной приводной радиостанцией
Приводной аэродромной радиостанцией называется радиостанция с точно известным местоположением, предназначенная для определения направления на неё с помощью радиокомпаса.
Приводные радиостанции совместно с самолетными радиопеленгаторами позволяют решать следующие задачи:
вывод самолёта на аэродром;
расчёт захода на посадку самолёта в сложных условиях;
определение места самолёта;
полёт по заданному маршруту;
обозначение контрольных ориентиров.
Кроме того, приводная радиостанция может использоваться в качестве запасной связной радиостанции и для передачи метеосводок.
Приводные радиостанции бывают стационарными и подвижными (подвижные обычно монтируются на автомашинах).
Приводные радиостанции работают по специальному расписанию. Время работы ПАР указывается в перечнях аэродромов и регламентах аэронавигационной информации по воздушным трассам (раздел «Средства управления и радиотехнического обеспечения полётов»). В нерабочее время ПАР может быть включена по специальной заявке с борта самолёта.
Каждой приводной радиостанции присваивается позывной, передаваемый в эфир кодом Морзе. Позывной состоит из двух букв для дальней ПАР (например, МЗ) и одной буквы для ближней ПАР (обычно первой буквы позывного дальней приводной, например, М).
Принцип действия и режимы работы
Принцип действия. Приводная радиостанция представляет собой передающее устройство с антенной ненаправленного излучения (рис. 2.26).
При включении аппаратуры задающий генератор вырабатывает высокочастотные колебания, которые усиливаются в усилителе мощности и излучаются антенной. Обычно в ПАР используются Т-образные антенны, состоящие из горизонтальных проводников и вертикального снижения, подключаемого к передатчику. Излучаемый высокочастотный сигнал модулируется или манипулируется низкочастотным напряжением, вырабатываемым в модуляторе. Работа модулятора в свою очередь управляется от автомата позывных сигналов (АПС) или от телеграфного ключа, магнитофона, микрофона.
Режимы работы. Станция может работать на привод и на связь.
Работа на привод осуществляется в телеграфном или телефонном режиме в одном из следующих родов работы (рис. 2.27):
телеграфном 1 незатухающими колебаниями с коммутацией уровня несущей. В регламентах аэронавигационной информации этот род работы ПАР условно обозначен А1. Для прослушивания позывных в радиокомпасе необходимо включить режим ТЛГ;
телефонном 2 тонально-модулированными колебаниями с подачей позывных от АПС без коммутации уровня несущей. На несущую частоту, излучаемую непрерывно, накладывается звуковая частота генератора во время подачи позывного. В регламентах аэронавигационной информации этот род работы обозначен А2;
телефонном 3 при работе от электропроигрывателя или магнитофона. В этом режиме на программу передачи от микрофона или электропроигрывателя накладываются позывные от АПС. В регламентах аэронавигационной информации этот род работы обозначен A3;
телеграфном 4 методом частотной манипуляции (ЧМ) с подачей позывных от АПС;
телефонном 5 методом частотной манипуляции с подачей позывных от АПС.
Работа на связь возможна телеграфным ключом незатухающими колебаниями, тонально-модулированными колебаниями или методом частотной модуляции, а также через микрофон в телефонном режиме.
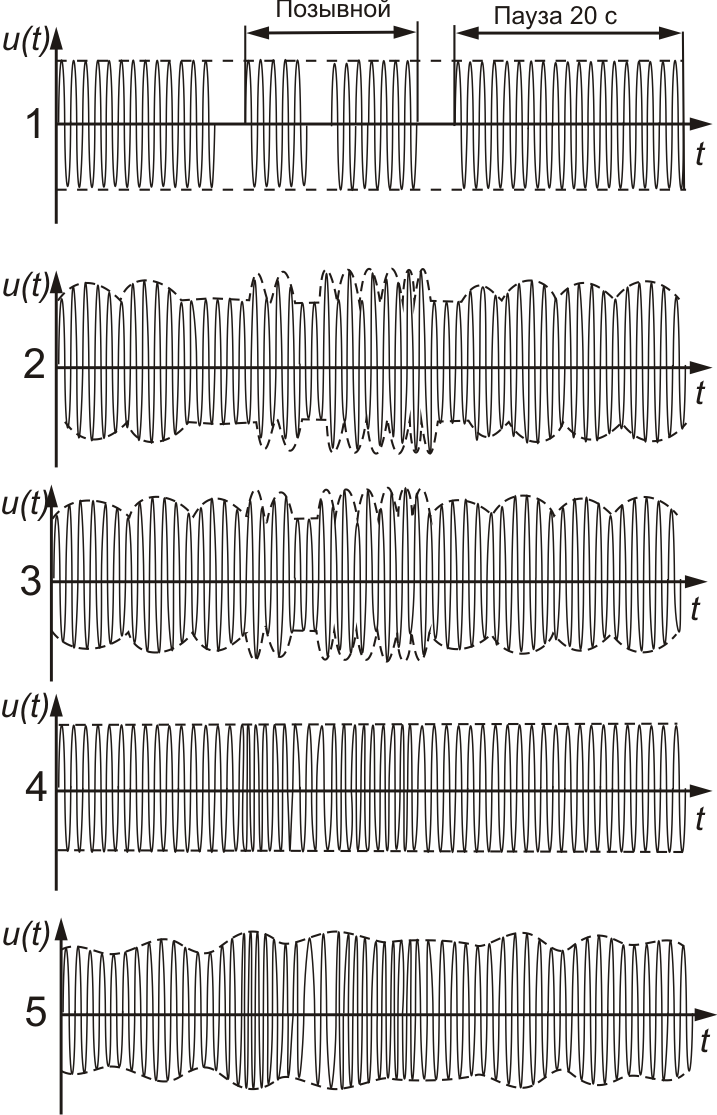
Рис. 2.27. Временные диаграммы сигналов, излучаемых ПАР в различных режимах работы (1 – род А1; 2 – род А2; 3 – род А3; 4 – телеграфный ЧМ; 5 – телефонный ЧМ)
2.7.2. Автоматические радиопеленгаторы
Назначение и решаемые задачи
Наземный радиопеленгатор (НРП) предназначен для определения направления на передающую радиостанцию. А так как передающая радиостанция устанавливается на самолёте, то НРП фактически определяют направление на самолёт. Наземные радиопеленгаторы могут быть ультракоротковолновыми (УКВ НРП) и коротковолновыми (KB НРП).
Наземный радиопеленгатор и самолётная связная радиостанция образуют радиопеленгаторную угломерную систему, в которой НРП используется в качестве радионавигационной точки.
Угломерная радиопеленгаторная система обеспечивает решение следующих задач:
контроль пути определением линии положения или места самолёта;
выполнение полёта на радиопеленгатор или от него;
определение навигационных элементов полёта;
ведение контроля за самолетами, находящимися в воздухе;
выход на аэродром посадки, построение посадочного маневра и выдерживание посадочного курса.
Особенности принципа действия автоматического радиопеленгатора
Особенности пеленгования в диапазонах KB и УКВ. Пеленгование в указанных диапазонах волн имеет ряд особенностей. Короткие волны распространяются поверхностным и пространственным лучами. На расстоянии до 150 км связь ведется в основном за счет приёма поверхностной волны. Передача сигналов на расстояние свыше 300 км производится пространственным лучом. На участке 150–300 км прием сигналов коротковолнового диапазона осуществляется неустойчиво. Размеры зоны неуверенного приёма изменяются в зависимости от длины волны, времени суток и года и т. д.
Особенностью пеленгования в диапазоне УКВ является то, что радиопеленгаторы, работающие в данном диапазоне, имеют дальность действия, определяемую из условий прямой видимости. Незначительная длина волны УКВ пеленгатора (2–3 м) приводит к появлению на рабочей площадке радиопеленгатора значительного количества эффективных вторичных излучателей, искажающих диаграмму направленности антенной системы. Это предъявляет определенные требования к выбору рабочей площадки и обусловливает необходимость облёта НРП после установки для определения точности пеленгования.
Порядок запроса радиопеленгов. Радиообмен между самолётом и наземным радиопеленгатором осуществляется в такой последовательности: производится запрос пеленга с самолёта, следует ответ с НРП, после чего экипаж самолёта подтверждает прием пеленга.
Для использования наземных радиопеленгаторов экипаж самолёта должен знать его местоположение, позывной, рабочую частоту, режим работы и условное обозначение для заказа [7].
Запрос пеленга при работе с коротковолновыми радиопеленгаторами производится с помощью Щ-кода. Кодовые фразы и сигналы передаются без повторений в такой последовательности [7]:
позывной вызываемого пеленгатора;
слово ДЕ (означает «Я»);
телеграфный позывной своей радиостанции;
кодовая фраза ЩТЕ? («Каков мой истинный пеленг?»);
сигнал для пеленгования (два тире, передается двукратным нажатием ключа по десять секунд каждое);
позывной своей радиостанции;
кодовая фраза К (знак окончания передачи).
Пример. Запрос: «РМНГ ДЕ РПЛДН ЩТЕ? (нажатие ключа дважды по 10 с) РПЛДН К».
Ответ: «РПЛДН ДЕ РМНГ 12 10 ЩТЕ 142 К» (12 10 время снятия пеленга; 142 значение пеленга в градусах).
Квитанция (подтверждение приема пеленга): «РПЛДН ОК 12 10 ЩТЕ 142 СК» (ОК кодовое выражение «понял»; СК конец связи).
Телефонный перевод квитанции: «Я понял 12 10 ИПС 142, связь кончаю».
В некоторых случаях запрос пеленга у коротковолнового пеленгатора может производиться в телефонном режиме. При запросе пеленга в этом режиме используется кодовая фраза «Прибой», в ответ экипажу сообщается магнитный пеленг радиопеленгатора.
Радиообмен производится следующим образом. Запрос: «Памир – Пеленг, я двадцать восемь триста двадцать четыре, дайте Прибой, дайте Прибой».
Ответ: «Двадцать восемь триста двадцать четыре, я Памир – Пеленг, ваш Прибой сто сорок пять».
Квитанция: «Я двадцать восемь триста двадцать четыре, понял сто сорок пять».
Ультракоротковолновые радиопеленгаторы запрашиваются только в телефонном режиме. При обеспечении полётов авиационной части радиопеленгаторы работают на частотах канала стартовой связи и пользуются позывным командной радиостанции с добавлением индекса радиопеленгатора.
В случае потери ориентировки с самолёта подается сигнал ЩЖЙ в телеграфном режиме или кодовая фраза «Полюс» в телефонном режиме. По сигналу ЩЖЙ на самолёт сообщается истинный пеленг самолёта, по кодовой фразе «Полюс» – магнитный пеленг радиопеленгатора.
Запрос места самолёта у радиопеленгаторных баз производится в телеграфном режиме кодовой фразой ЩТФ. Место самолёта сообщается в градусах долготы и широты.
Пример. Запрос: «РРНГ ДЕ РПЛДН ЩТФ? (Нажатие ключа дважды по 10 с) РПЛДН К».
Ответ: «РПЛДН ДЕ РРНГ 12 40 ЩТФ 50 45 149 30 ОК» (50 45 – широта в градусах и минутах; 149 30 — долгота в градусах и минутах).
Квитанция: «РПЛДН ОК ЩТФ 50 45 149 30 СК».
Примечание. Более подробно правила ведения радиосвязи на различных этапах выполнения полёта будут изучаться в теме №6 «Основы организации и правила ведения воздушной радиосвязи в авиационном полку» дисциплины «Связь и радиосветотехническое оборудование аэродромов» в 6 семестре и освещены в литературе [7].
2.7.3. Радиопеленгаторная база
Для обеспечения дальних перелетов используются автономные радиопеленгаторные пункты и радиопеленгаторные базы. Радиопеленгаторный пункт состоит из радиопеленгатора и связной радиостанции. Радиопеленгаторная база включает в себя несколько радиопеленгаторных пунктов, работающих на одной волне. Радиопеленгаторная база, как правило, состоит из командного и двух радиопеленгаторных пунктов.
Во время запроса пеленга происходит пеленгование самолёта одновременно всеми радиопеленгаторными пунктами. Эти данные по радио сообщаются на командный радиопеленгаторный пункт, где определяется место самолёта и сообщается по радио на самолёт. На радиопеленгаторных пунктах обычно устанавливаются коротковолновые радиопеленгаторы типа Р-301, которые работают в диапазоне частот 1,512 МГц, имеют дальность действия 2 000 км и точность определения пеленга 2°.
2.7.4. Веерные радиомаяки
Веерные (секторные) радиомаяки предназначены для определения места самолёта. Эта задача решается совместно с самолётным радиокомпасом.
В качестве радиомаяков применяются маяки типа ВРМ-5.
Веерные радиомаяки работают по расписанию, объявленному в извещениях мореплавателей.
Основные тактико-технические данные
Веерный радиомаяк ВРМ-5 имеет следующие основные тактико-технические данные:
дальность действия от 40 до 2 000 км;
точность пеленгования зависит от положения самолёта относительно радиомаяка и составляет:
днем ±(0,3…0,5)°;
ночью ±(l…2)°;
ошибка в определении места самолета по двум пеленгам 4…18 км;
время, необходимое для пеленгования, при использовании специальной карты 5 мин.
Принцип действия
ВРМ-5 представляет собой радиомаяк направленного излучения с веером вращающихся равносигнальных зон (рис. 2.28). Определение линии положения самолёта основано на измерении угла поворота оси равносигнальной зоны из исходного положения до направления маяк – самолёт. Величина угла поворота определяется по числу соответствующих сигналов, принятых экипажем (штурманом).
В передатчике вырабатывается напряжение высокой частоты (например, 364 кГц), которое поступает на коммутатор фазы, первый фазовращатель и манипулятор позывного сигнала. С манипулятора высокочастотное напряжение подается на центральную антенну, которая излучает незатухающие колебания с периодической подачей позывного сигнала путем коммутации уровня несущей. Левый вибратор антенной системы запитывается высокочастотным напряжением, фаза которого медленно изменяется при повороте ротора первого фазовращателя (рис. 2.28б). Правый вибратор питается аналогичным напряжением, которое дополнительно меняет периодически фазу на 180° за счет работы коммутатора. Работа коммутатора фазы в свою очередь управляется несимметричным триггером.
Рис. 2.28. Принцип
действия веерного радиомаяка:
а)
структурная схема; б)
временные
диаграммы работы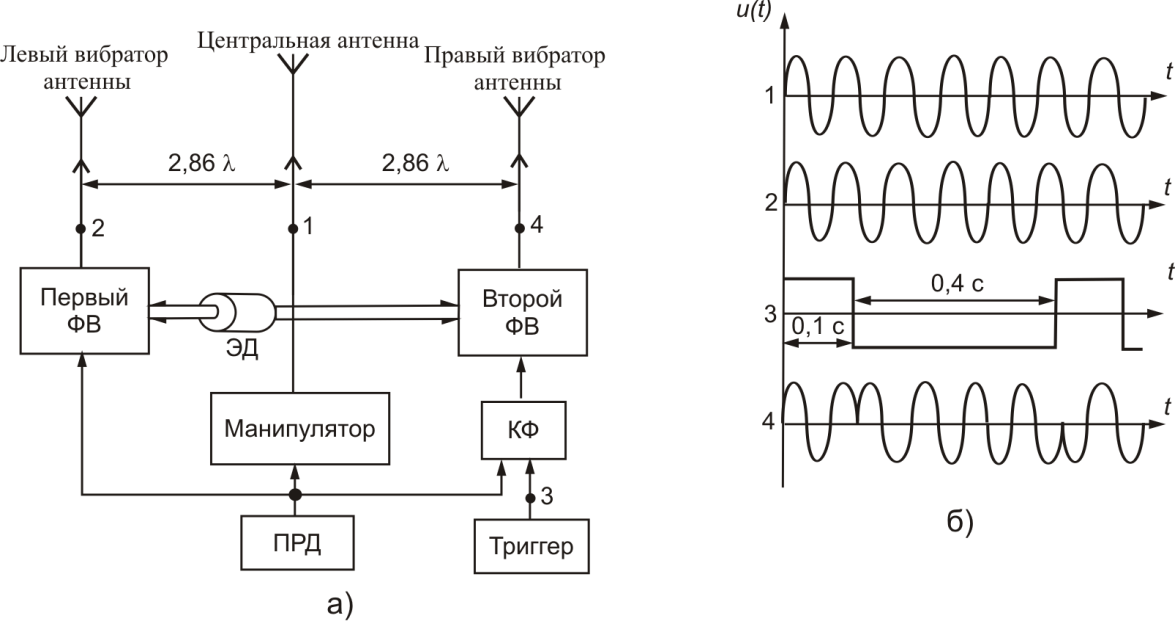
Все три антенны установлены на одной линии, носящей название базовой. Базовое расстояние между боковыми антеннами равно 5,72λ. Антенны представляют собой свободностоящие стальные мачты, которые запитываются высокочастотным напряжением по подземному кабелю. Две боковые антенны являются вибраторами Н-образной антенны.
Вид характеристики направленности такой антенны зависит от расстояния между вибраторами и может иметь многолепестковый характер. Количество лепестков определяется по формуле
![]() ,
,
где n – число лепестков;
m – число полуволн, укладывающихся между вибраторами.
Расположение лепестков характеристики излучения зависит от схемы питания антенны. Если попеременно осуществлять запитывание боковых антенн синфазным или противофазным напряжением, то диаграмма направленности излучения антенной системы будет изменяться (рис. 2.29). Время, в течение которого вибраторы запитываются в фазе, соответствует по длительности точке t = 0,1 с, а время питания вибратора в противофазе соответствует длительности тире t = 0,4 с. Таким образом, в какой-то момент времени формируются лепестки диаграммы направленности антенной системы 1, 3, 5, ..., 19, 21 и т. д., а в следующий момент времени — лепестки 2, 4, 6, ..., 18, 20, 22 и т. д.
Рис. 2.29. Характеристика
направленности антенн радиомаяка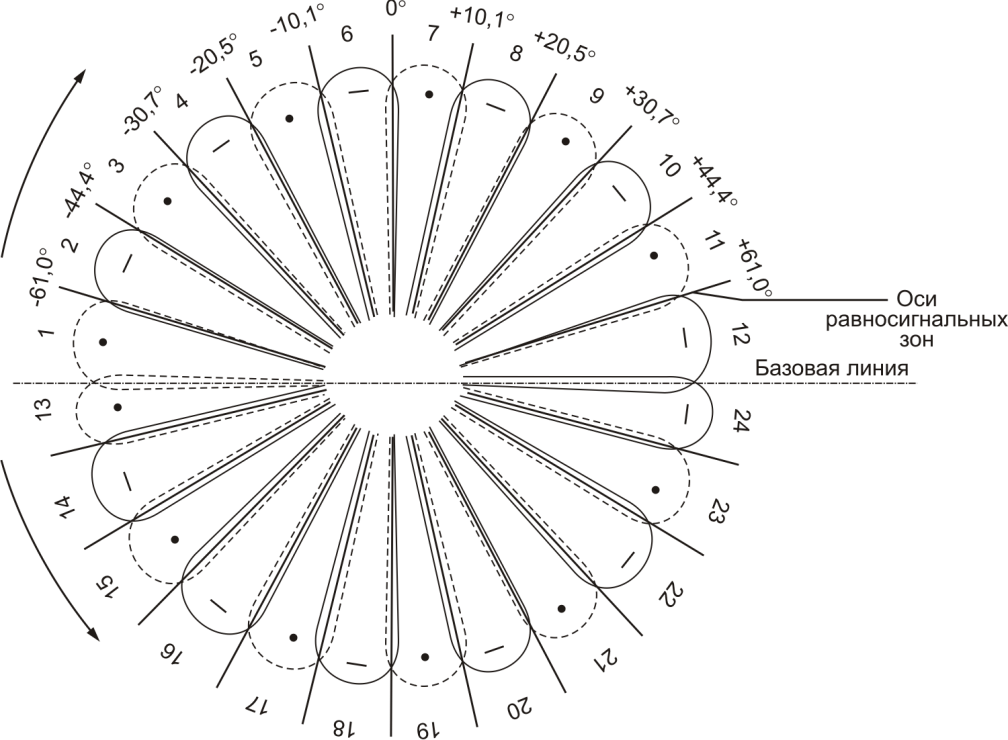
Из рис. 2.29 видно, что в определенных местах лепестки характеристики направленности антенной системы пересекаются, т. е. образуются так называемые равносигнальные зоны. При нахождении в таких зонах наблюдатель будет слышать сплошной тон. При отклонении самолёта вправо или влево от равносигнальной зоны будут слышны точки или тире.
Пеленгование с помощью радиомаяка становится возможным благодаря плавному изменению фазы напряжений в боковых антеннах с помощью фазовращателей. В этом случае лепестки диаграммы направленности, а вместе с ними и равносигнальные зоны будут плавно вращаться так, что, в конце концов, лепестки тире займут место лепестков точек, а равносигнальные зоны переместятся от одной границы сектора к другой. За время одного указанного перемещения радиомаяком излучится 60 знаков (тире и точек).
Недостатком радиомаяка является то, что равносигнальные зоны похожи друг на друга и требуются побочные средства для определения района, в котором находится самолёт.
Режим работы
Полный цикл работы радиомаяка ВРМ-5 составляет 60 с. Первые 30 с радиомаяк работает как обычный передатчик с ненаправленным излучением. В этом случае излучение сигнала осуществляется только через центральную антенну (рис. 2.30а). За это время передаются позывные маяка и длинное тире – 10 с для настройки приёмника и приближенного определения пеленга.
В последующие 30 с осуществляется направленное излучение радиомаяка с использованием всех трёх антенн. Экипажи самолётов, находящиеся над различными точками земной поверхности, услышат сигналы точек и тире в различных комбинациях. Это позволяет определить угловое положение самолётов относительно ВРМ-5.
Рис. 2.30. Характер
сигнала ВРМ-5:
а)
излучаемый сигнал;
б)
принимаемый сигнал в различных точках
пространства
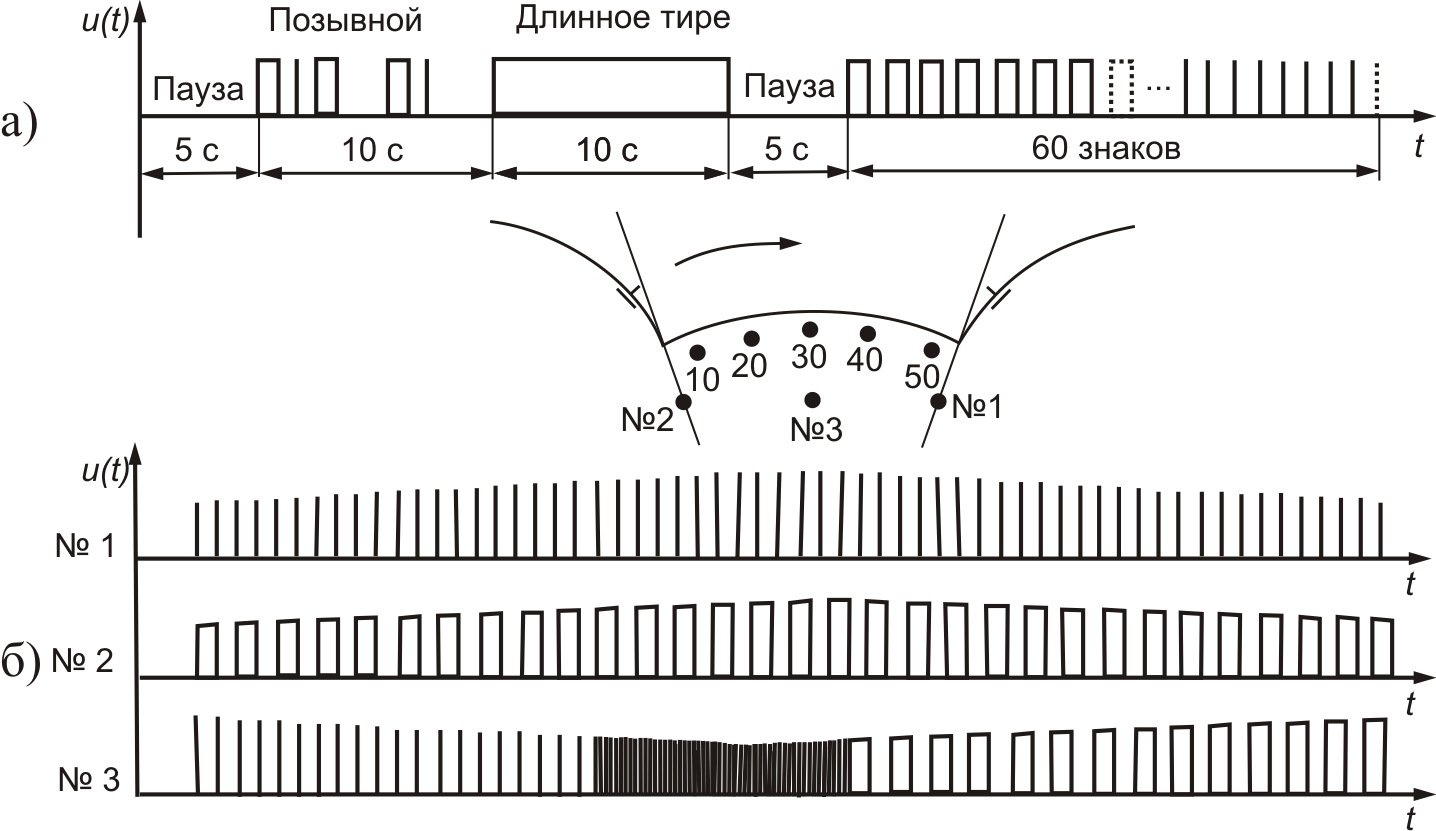
Например, при нахождении наблюдателя в точке № 1 (рис. 2.30б) первоначально будет прослушиваться сплошной тон, что соответствует нахождению в равносигнальной зоне, а затем точки. Если наблюдатель находится в точке № 3, то им первоначально будет услышано около 30 точек, затем тональный сигнал и далее около 30 тире.
Порядок работы при определении направления на радиомаяк
Для определения пеленга на радиомаяк необходимо настроить радиокомпас в режиме «Антенна» на частоту ВРМ-5 и прослушать его позывные. Затем перейти в режим «Компас» и грубо определить пеленг и зону радиомаяка.
Далее в режиме «Антенна» сосчитать количество точек и тире и точно определить направление на ВРМ-5. Подсчет знаков производится несколько раз. После этого необходимо с полученными данными войти в специально подготовленную карту и определить пеленг или место самолёта. Как известно, сумма точек и тире всегда равна 60. Если часть точек или тире не прослушивается за счет потери в равносигнальной зоне и сумма их меньше 60, то недостающее число знаков делится пополам и полученное число прибавляется к числу точек и тире.
2.7.5. Береговые радиомаяки
При полётах над морем в районе Дальнего Востока возможно использование береговых радиомаяков (БРМ). Для их использования необходимо знать расписание работы, местоположение радиомаяков, их позывные.
Принцип определения местоположения самолёта с помощью БРМ заключается в следующем. Группа из 56 маяков, расположенных в пределах небольшого участка побережья Тихого океана (150…200 морских миль), работают на одной несущей частоте в диапазоне СВ (частично в ДВ) и имеют индивидуальные двухбуквенные позывные (аналогично ДПРС на аэродроме). Кроме этого, частота тона модуляции у разных маяков может изменяться. Каждый маяк излучает свой позывной в течение определённого времени в соответствии с расписанием работы. Штурман настраивает АРК на рабочую частоту данной цепочки радиомаяков и прослушивает позывные с целью опознавания маяка, работающего в данный момент. Затем по прибору (например, УШ) определяется КУР или пеленг радиомаяка. На карте с нанесёнными точками стояния БРМ откладывается измеренное значение пеленга самолёта от соответствующего радиомаяка. По нескольким (минимум двум) значениям пеленгов от радиомаяков определяется местоположение самолёта. Пример позывных и расписания работы нескольких цепочек БРМ приведён в табл. 2.1.
Таблица 2.1
Позывные и расписание работы нескольких цепочек БРМ
Название радиомаяка |
Позывной |
Дальность действия день/ночь, миль |
Рабочая частота, кГц |
Частота модуляции тона, Гц |
Расписание |
Гамова Поворотный Островной Низменный Егорова Аскольд |
ГМ ПО ОР НЗ ЕО АД |
150/80 150/80 150/80 100/80 150/80 80/80 |
306,5 |
900 752 500 700 700 500 |
|
Брюса |
БЮ |
15 |
300,5 |
А1 |
1' (минута) работа, 2' (мину-ты) пауза |
Скрыплев Находка |
СВ НХ |
80 30 |
291,5 |
500 900 |
|
