

Глава 4. Угломерно-дальномерные радионавигационные системы
4.1. Назначение и типы угломерно-дальномерных радионавигационных систем
Угломерно-дальномерные радионавигационные системы (УД РНС) предназначены для обеспечения ближней навигации, межсамолётной навигации и посадки самолётов в простых и сложных метеорологических условиях.
Они представляют собой систему, состоящую из наземных радиомаяков и бортового оборудования и обеспечивающую измерение азимута и дальности самолёта на его борту относительно радионавигационной точки, в которой установлена антенна радиомаяка и положение которой известно. Часто азимут и дальность самолёта определяются также и на радиомаяке (канал наземной индикации).
Угломерно-дальномерные радионавигационные системы часто называют радиотехническими системами ближней навигации (РСБН), в соответствии с дальностью их действия (несколько сотен километров) и кругом решаемых задач:
выполнение полёта по заданному маршруту;
непрерывное определение местоположения самолёта в заданной системе координат;
определение навигационных элементов полёта;
обеспечение встречи самолётов в воздухе и полёта в строю;
выполнение коррекции бортовых вычислительных устройств;
вывод самолётов в точку роспуска и снижение при пробивании облачности по заданной для данного типа самолёта траектории;
построение маневра для захода на посадку и вывод самолёта на взлётно-посадочную полосу по курсу посадки и глиссаде планирования с определением расстояния до точки приземления;
определение полярных координат самолётов на наземном индикаторе кругового обзора и их индивидуальное опознавание.
Угломерно-дальномерные системы имеют два основных информационных канала:
канал азимута – система, состоящая из наземного азимутального радиомаяка и бортового оборудования и обеспечивающая определение азимута самолёта относительно радиомаяка;
канал дальности – система, состоящая из наземного дальномерного радиомаяка и бортового оборудования и обеспечивающая определение дальности самолёта от радиомаяка.
Наибольшее распространение получили отечественные системы типа РСБН, зарубежные системы VOR/DME и TACAN.
В состав системы типа РСБН входит один азимутально-дальномерный радиомаяк и бортовое оборудование для получения информации об азимуте и дальности самолёта. РСБН также обеспечивает заход на посадку и наблюдение воздушной обстановки (с помощью дополнительного наземного и бортового оборудования).
В соответствии с решаемыми задачами различают:
радиотехнические системы ближней навигации;
радиотехнические системы ближней навигации и посадки;
радиотехнические системы ближней навигации, межсамолётной навигации и посадки.
Система VOR/DME предназначена для решения следующих задач: непрерывного и автоматического определения местоположения самолёта, привода самолёта в любую заданную точку в пределах зоны действия системы. Система VOR/DME образуется при территориальном совмещении азимутального радиомаяка VOR (VHF Omnidirectional Radio Range – всенаправленный радиомаяк УКВ диапазона) и дальномерного радиомаяка (ответчика дальномера) DME (Distanse Measurement Equipment – оборудование для измерения дальности). Радиомаяки VOR и DME используются и как самостоятельные средства навигации, образуя соответственно угломерные и дальномерные системы ближней навигации.
Система VOR/DME является стандартным средством ближней навигации на зарубежных воздушных линиях.
Система TACAN военного назначения и предназначена, в основном, для решения тех же задач, что и система VOR/DME.
4.2. Навигационные элементы, определяемые с помощью угломерно-дальномерных радионавигационных систем
В угломерно-дальномерных радионавигационных системах измеряемыми навигационными элементами являются:
расстояние между самолётами, от самолёта до наземного радиомаяка и до точки приземления D (рис. 4.1, 4.2);
азимут самолёта Аз относительно наземного радиомаяка (рис. 4.1);
положение самолёта относительно заданного направления (плоскости курса, глиссады планирования, направление на другой самолёт) (рис. 4.3).
Работа угломерно-дальномерных радионавигационных систем основана на излучении и приёме радиосигналов, в которых информация о навигационных элементах содержится в каком-либо параметре, характеризующем электромагнитную волну.
Однозначные функциональные зависимости между навигационными элементами и параметрами радиосигнала обуславливаются рядом закономерностей:
постоянством скорости распространения радиоволн (с3108 м/с);
прямолинейностью распространения радиоволн;
способностью радиоволн фокусироваться в узкие лучи (направленное излучение и направленный прием).
О
 бнаружение
и извлечение информации о навигационных
элементах из радиосигналов осуществляется
измерением того параметра принятого
сигнала, который содержит навигационное
сообщение.
бнаружение
и извлечение информации о навигационных
элементах из радиосигналов осуществляется
измерением того параметра принятого
сигнала, который содержит навигационное
сообщение.
Измерение расстояния осуществляется различными радиотехническими методами. Широкое применение в авиации находят методы, основанные на измерении времени распространения радиоволн. При постоянстве скорости и прямолинейности распространении радиоволн измерение расстояния сводится к измерению временного интервала tD между моментом излучения запросного сигнала и приемом ответного, переизлученного сигнала. Задержки в цепях самолетного и наземного оборудования известны и могут быть учтены, поэтому измеренное время рассчитываем по формуле: tD=2D/c, где D – измеряемое расстояние; с скорость распространения радиоволн.
Наиболее просто идея измерения расстояния реализуется при импульсном режиме работы дальномерного канала системы.
Для определения азимута самолёта используются свойства прямолинейности распространения и направленности излучения радиоволн. Антенна азимутального радиомаяка направленного действия вращается с постоянной частотой а. В момент совпадения оси диаграммы направленности с истинным меридианом в бортовом оборудовании формируется сигнал начала отсчёта азимута – «северный» сигнал. Фиксируя момент совпадения оси вращающейся диаграммы направленности антенны азимутального радиомаяка с направлением на самолёт, можно определить азимут самолёта (Аз) по временному интервалу tа между моментами формирования «северного» и приемом азимутального сигналов:
Аз= tа а.
Принцип определения положения самолёта относительно заданного направления основан на использовании направленного излучения радиоволн или их направленного приёма. В обоих случаях устанавливается зависимость углового навигационного элемента от уровня сигналов (уровня амплитуды сигнала на несущей частоте), либо от глубины их модуляции.
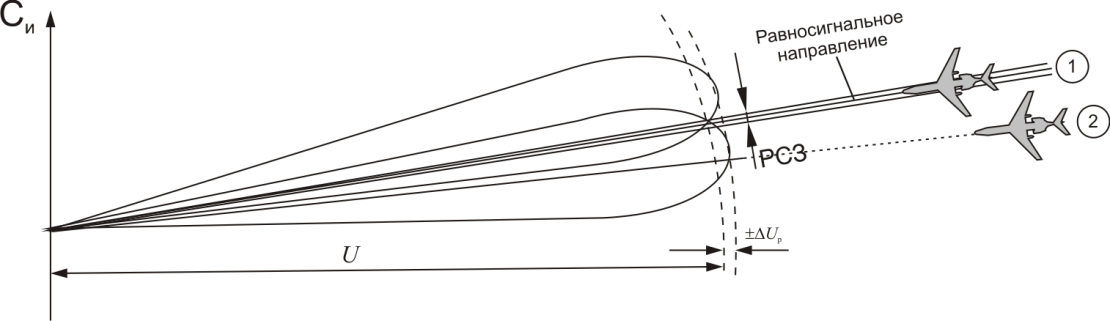
Рис. 4.3. Равносигнальный метод пеленгования
Фиксированное направление в пространстве может быть задано или определено равносигнальным методом. При равносигнальном методе сравниваются амплитуды сигналов, принимаемых по левому и правому лепесткам диаграммы направленности.
Если самолёт находится на линии, проходящей через точку пересечения лепестков диаграммы направленности (рис. 4.3) наземного радиомаяка или передающего устройства другого самолёта (равносигнальном направлении), то амплитуды принятых самолётным оборудованием сигналов по левому и правому лепесткам (по несущим или модулирующим частотам) будут равны и разностный сигнал будет равен нулю.
При отклонении самолёта от равносигнального направления появляется разностный сигнал UpUp min, величина и знак которого определяется соответственно величиной и стороной отклонения. Наименьшее приращение разносного сигнала Up min регистрируемое оператором, зависит от физических свойств органов чувств операторов (слуха, зрения), физических и технических характеристик индикатора, условий наблюдения (величины сигналов, помех и т.д.). Угол, в пределах которого не может быть обнаружено приращение разностного сигнала Up, называется равносигнальной зоной (РСЗ). В дальнейшем, говоря о равносигнальном направлении, мы будем иметь в виду равносигнальную зону. Разностный сигнал используется для определения по визуальному индикатору положения самолёта относительно заданного направления или для автоматического управления полётом самолёта в заданном направлении.
Рассмотренные физические основы и методы радионавигационных измерений используется для построения трактов ближней навигации, межсамолётной навигации и посадки угломерно-дальномерных систем.
4.3. Состав радиотехнической системы ближней навигации
Каждый тип системы ближней навигации представляет собой комплекс наземного и самолётного оборудования. Состав самолётного оборудования зависит от типа самолёта, на котором оно установлено. Назовём некоторые варианты бортового оборудования системы: РСБН-ПКВ, РСБН-6С, РСБН-2С.
Состав наземного оборудования РСБН определяется его функциями и может включать:
азимутально-дальномерный радиомаяк;
радиомаяки посадочной радиомаячной группы (ПРМГ).
Оборудование азимутально-дальномерного радиомаяка РСБH выпускается в двух вариантах: РСБН-2Н и более позднего выпуска РСБН-4Н (рис. 4.4), аналогичного РСБН-2Н и отличающегося от него повышенной надежностью и увеличением количества рабочих каналов (88 вместо 40). Конструктивно оборудование радиомаяка состоит из аппаратной радиомаяка и источников питания.
а)
б)
в)
Рис. 4.4.
Азимутально-дальномерный всенаправленный
радиомаяк дециметрового
диапазона РСБН-4Н:
а)
внешний вид радиомаяка; б) вид аппаратной
радиомаяка; в) позиция на местности

В аппаратной размещаются азимутальный радиомаяк, ретранслятор дальномера, индикатор кругового обзора, средства связи, контрольно-измерительная аппаратура.
Азимутальный радиомаяк включает:
антенное устройство направленного действия передатчика азимутального сигнала;
антенное устройство всенаправленного действия передатчика опорных азимутальных «35» и «36» сигналов;
передатчик азимутальных сигналов П-200М;
передатчик опорных азимутальных «35» и «36» сигналов П-20А.
Ретранслятор дальномера включает:
антенное устройство всенаправленного действия наземного приемного устройства;
антенное устройство всенаправленного действия передатчика дальномерных сигналов;
наземное приёмное устройство (НПУ);
передатчик дальномерных сигналов П-20Д.
При
установке на местности наземный радиомаяк
![]() с большой точностью ориентируется
относительно истинного меридиана. При
размещении на аэродроме его устанавливают
на расстоянии 500…800 м от центра и оси
взлётно-посадочной полосы (рис. 4.5а).
с большой точностью ориентируется
относительно истинного меридиана. При
размещении на аэродроме его устанавливают
на расстоянии 500…800 м от центра и оси
взлётно-посадочной полосы (рис. 4.5а).
а)
б)
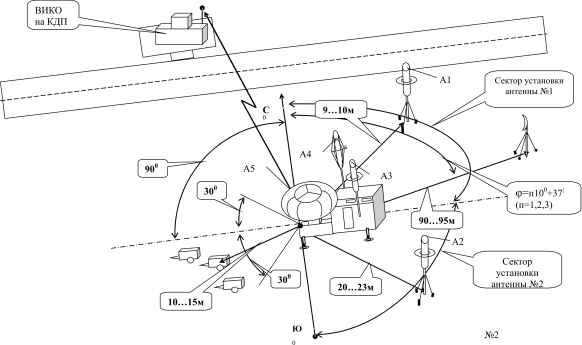
Рис. 4.5. Схема размещения радиотехнического оборудования на аэродроме:
а) план размещения и удаленность относительно ВПП;
б) состав оборудования, входящего в наземный радиомаяк РСБН-4Н:
Аппаратная РСБН-4Н – 1 шт.
Выносной индикатор кругового обзора Е-327 (ВИКО) – 1 шт.
Блок дистанционного управления ТУ-ТС – 1 шт.
Преобразователь сети 50/400 Гц ВПЛ-30 – 1 шт.
Резерв – дизельная электростанция ЭД-30 – 2 шт.
Контрольно-выносной пункт – 1 шт.
Приемная антенна нижних углов – 1 шт.
Приемная антенна верхних углов – 1 шт.
Передающая антенна дальномерных сигналов – 1 шт.
Передающая антенна азимутально-опорных сигналов – 2 шт.
Посадочная радиомаячная группа дециметрового диапазона волн выпускается в двух основных вариантах: ПРМГ-4 и более позднего выпуска ПPMГ-5 (рис. 4.6) и ПРМГ-76УМ (рис. 4.7).

а) б)
Рис. 4.6. Посадочная радиомаячная группа дециметрового диапазона волн ПРМГ-5:
а) внешний вид; б) аппаратура дистанционного контроля и управления

Рис. 4.7. Аппаратура дистанционного контроля и управления ПРМГ-76УМ


Рис. 4.8. Курсовой радиомаяк Рис. 4.9. Глиссадный радиомаяк
Состав
оборудования ПРМГ независимо от типа
и модификаций включает курсовой радиомаяк
![]() (КРМ) (рис. 4.8), глиссадный радиомаяк
(КРМ) (рис. 4.8), глиссадный радиомаяк
![]() (ГРМ) (рис. 4.9) и ретранслятор дальномера
(ГРМ) (рис. 4.9) и ретранслятор дальномера
![]() (РД) (табл. 4.1).
(РД) (табл. 4.1).
Таблица 4.1
Тип и модификация ПРМГ |
Курсовой радиомаяк |
Глиссадный радиомаяк |
Ретранслятор дальномера |
ПРМГ-4 |
КРМ-4 |
ГРМ-4 |
РД-4 |
ПРМГ-4К |
КРМ-4К |
ГРМ-4К |
РД-4К |
ПРМГ-4М |
КРМ-4М |
ГРМ-4М |
РД-4М |
ПРМГ-4КМ |
КРМ-4КМ |
ГРМ-4КМ |
РД-4КМ |
ПРМГ-5 |
КРМ |
ГРМ |
РД |
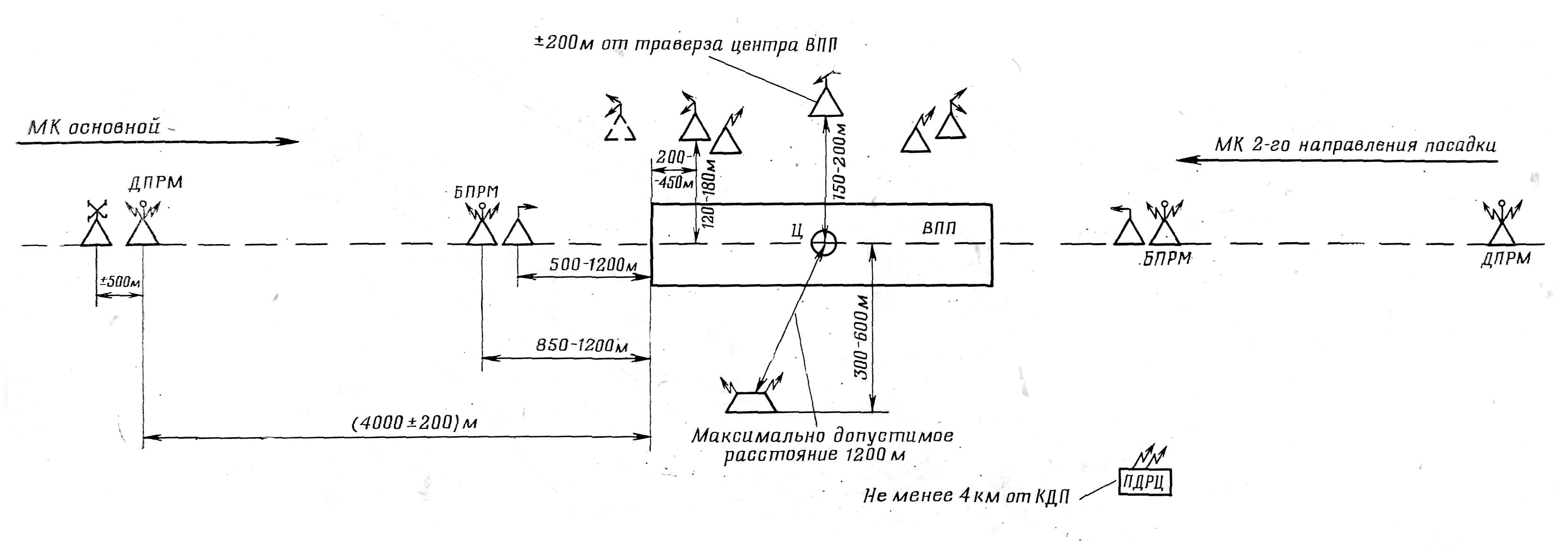
Радиомаяки ПРМГ выпускаются в подвижном или упаковочном вариантах. Антенная система ГРМ устанавливается в стороне от взлётно-посадочной полосы на удалении 200...450 м от начала полосы и 120...180 м от её оси (обычно слева, если смотреть с заходящего на посадку самолёта) (см. рис. 4.4а). КРМ устанавливается по оси взлётно-посадочной полосы на расстоянии 500...1200 м от её конца. Ретранслятор дальномера комплектуется либо с КРМ, либо с ГРМ, в зависимости от модификации ПРМГ (рис. 4.10).
Рис. 4.10. Схема расположения системы посадки ПРМГ-76УМ на местности
4.4. Параметры угломерно-дальномерных радионавигационных систем
В качестве основных параметров в угломерно-дальномерных радионавигационных системах рассматривают следующие:
зона действия;
дальность действия;
точность;
пропускная способность.
Зона действия – это область пространства, в пределах которой система обеспечивает получение информации о местоположении воздушного судна в виде азимута и дальности с заданной точностью и вероятностью (рис. 4.11).
Зона действия над радиомаяком ограничена нерабочей зоной, представляющей собой область пространства в виде телесного угла с вершиной в точке размещения антенны радиомаяка, в пределах которой невозможно определение местоположения воздушного судна по сигналам данного радиомаяка (рис. 4.11б). Размеры нерабочей зоны измеряются в градусах телесного угла и зависят от диаграммы направленности антенной системы радиомаяка.
Зона действия вдали от радиомаяка ограничена рабочей зоной радиусом Dмакс, т.е. частью плоскости, в пределах которой погрешность местоопределения Д1, 1 с определённой вероятностью не превосходит заданного значения Д2, 2. Рабочая зона ограничена окружностью с центром в точке установки радиомаяка (рис. 4.11а).
Дальность действия Dмакс – максимальное расстояние от радиомаяка до летательного аппарата, на котором обеспечивается получение информации о местоположении летательного аппарата в виде азимута и дальности с заданной точностью и вероятностью (рис. 4.11а).
а) б)
Рис. 4.11. К пояснению зоны действия угломерно-дальномерной системы:
а) вид зоны действия УДРНС в горизонтальной плоскости (горизонтальная штриховка);
б) ограничение зоны действия УДРНС в вертикальной плоскости
Для
систем, работающих в диапазоне метровых
и дециметровых волн, ухудшение точности
с ростом дальности определяется, главным
образом уменьшением отношения сигнал/шум
на входе приёмника. С другой стороны,
устойчивая связь в УКВ диапазоне имеет
место в пределах дальности прямой
видимости D0,
которая зависит от высоты подъёма
приёмной и передающей антенн над земной
поверхностью: D0 =
3,57(![]() +
+![]() ),
где [D0]=км, [h]=м.
),
где [D0]=км, [h]=м.
Если Dмакс>D0, то дальность действия системы определяется дальностью прямой видимости D0.
Точность – это способность системы измерять азимут и дальность с погрешностью, суммарная величина которой в пределах зоны действия не превышает заданного значения.
Пропускная способность – максимальное количество летательных аппаратов, одновременно обслуживаемых одним радиомаяком. Пропускная способность канала азимута не ограничена. Канал дальности работает по принципу «запрос-ответ». Поэтому пропускная способность ограничивается некоторым максимальным количеством ответов, на которые способен ответчик дальности без его перегрузки.
4.5. Принцип действия канала азимута систем типа РСБН
Канал азимута и канал дальности РСБН образуют совместно тракт ближней навигации, упрощенная структурная схема которого показана на рис. 4.12.
В канале азимута систем типа РСБН применяется импульсный (временной) метод измерения азимута самолёта, т.е. измеряется временной интервал между моментами совмещения вращающейся антенны азимутального радиомаяка с направлением на север истинный и с направлением на самолёт.
Азимутальный радиомаяк содержит в своём составе два передатчика (рис. 4.12), один из которых (П-20А) имеет всенаправленную антенную систему (изотропное излучение) и предназначен для излучения опорных «35» и «36» сигналов. Другой (П-200м), имеет антенную систему, диаграмма направленности которой в горизонтальной плоскости состоит из двух лепестков и вращается с угловой скоростью а = 100 об/мин (600 град/с), что соответствует частоте вращения Fвр = а/360 = 1,66 Гц. Передатчик П-200М работает в режиме излучения непрерывных немодулированных колебаний. Применение антенны с двухлепестковой диаграммой направленности позволяет с высокой точностью зафиксировать момент времени, когда ось симметрии диаграммы направленности, соответствующая минимуму между лепестками, направлена на самолёт.
На оси вращающейся антенны установлены магнитоэлектрические датчики опорных сигналов «35» и «36» (количество опорных импульсов за один оборот антенны равно, соответственно, 35 и 36). Опорными сигналами запускается передатчик П-20А, вырабатывающий кодированную двухимпульсную посылку на каждый опорный импульс (табл. 4.2). Датчики «35» и «36» установлены таким образом, что в момент совмещения оси диаграммы направленности вращающейся (азимутальной) антенны ДНА1 (рис. 4.13а) с истинным меридианом опорные импульсы «35» и «36» совпадают по времени (рис. 4.13б).
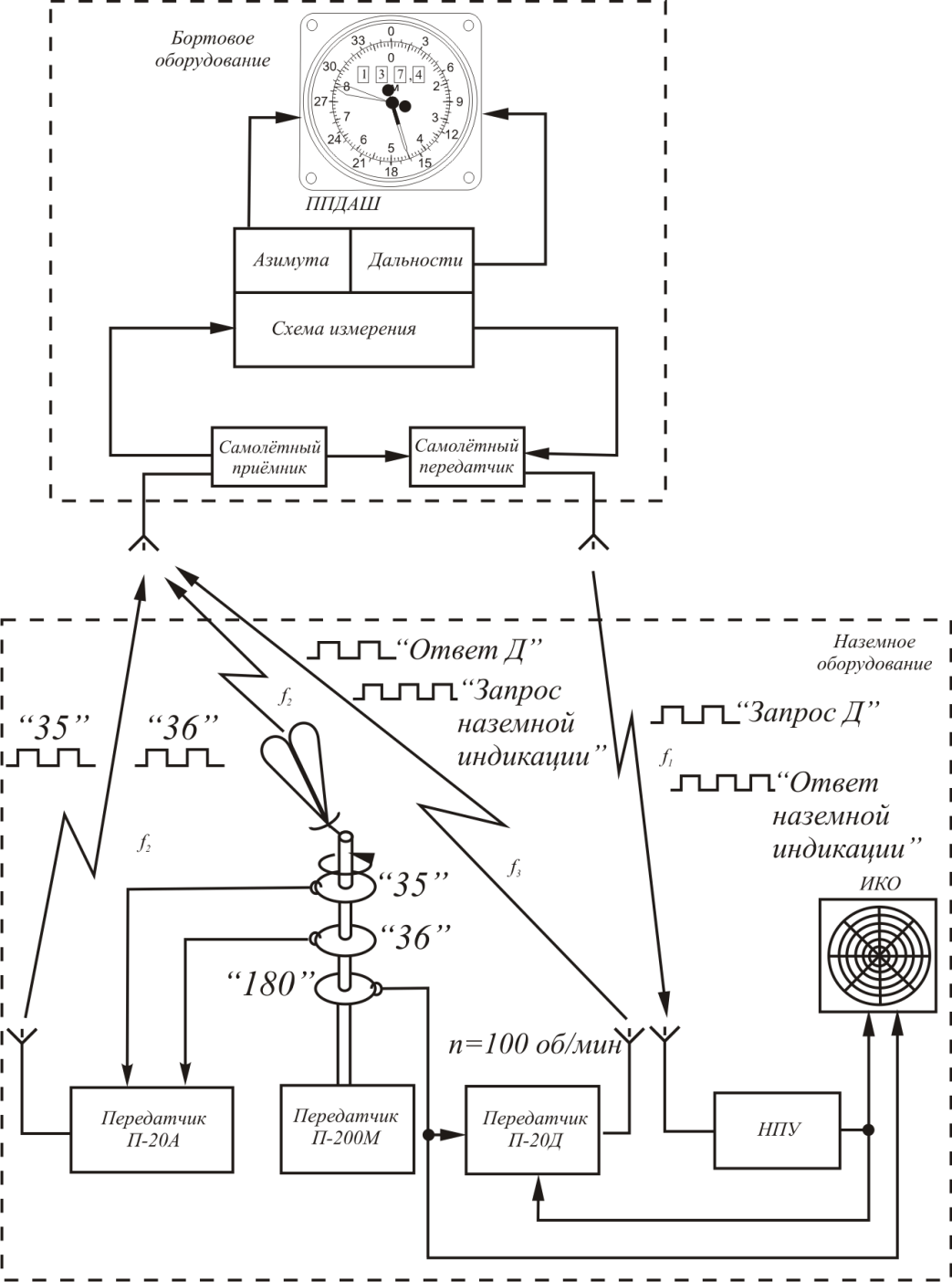
Рис. 4.12. Упрощенная структурная схема тракта ближней навигации
В момент совпадения во времени принятых бортовым приёмником опорных импульсов «35» и «36», в нём вырабатывается импульс («северный» сигнал или импульс северного совпадения), который запускает схему измерения азимута. Остановка схемы измерения (отсчёт азимута) происходит по приходу азимутального импульса (рис. 4.13б), который вырабатывается в бортовом приёмнике в момент совпадения оси вращающейся диаграммы направленности с направлением на самолёт (рис. 4.13а) и соответствует «провалу» азимутального сигнала. Азимутальные сигналы, принимаемые на борту самолёта, имеют форму сдвоенного колоколообразного импульса. Это определяется диаграммой направленности вращающейся антенны, состоящей из двух узких лепестков. «Азимутальный импульс» при азимуте точки приёма, равном Аз, запаздывает на время
tА = Аз/а
Рис. 4.13. К пояснению
принципа действия канала азимута РСБН:
а)
диаграммы направленности антенн ДНА1
и ДНА2 азимутального радиомаяка; б)
графики основных сигналов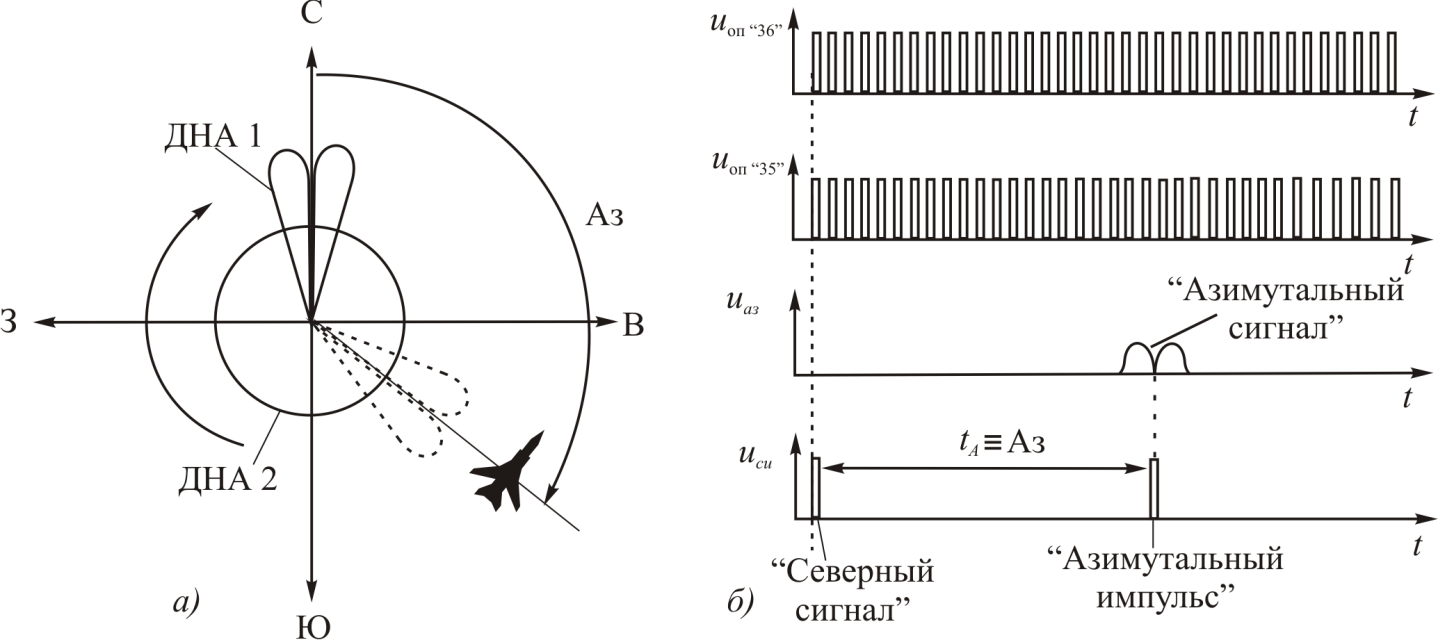
относительно «северного» сигнала. Именно это время измеряется с помощью схемы измерения азимута. Время tА прямо пропорционально азимуту самолёта. После преобразования осуществляется выдача измеренного азимута на индикатор и в другие устройства (например, вычислители).
4.6. Принцип действия канала дальности систем типа РСБН
Канал
дальности РСБН работает по принципу
«Запрос-ответ» и реализует импульсный
(временной) метод определения дальности.
Информация о дальности заключена в
интервале времени tD
между моментом излучения с самолёта
сигнала запроса дальности и моментом
приёма сигнала ответа дальности с
наземного дальномерного радиомаяка.
Этот метод основан на таких свойствах
радиоволн, как прямолинейность и
постоянство скорости распространения.
Так, если дальность от самолёта до
радиомаяка равна D,
то время tD
распространения радиоволны «туда и
обратно» равна
![]() ,
где с
3108 м/с –
скорость распространения радиоволны,
t3 – аппаратурная
задержка (известна).
,
где с
3108 м/с –
скорость распространения радиоволны,
t3 – аппаратурная
задержка (известна).
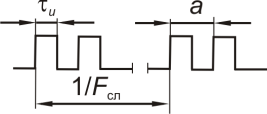
Схема измерения дальности (см. рис. 4.12) вырабатывает импульсы запуска самолётного передатчика (запросчика дальномера), который с приходом каждого запускающего импульса формирует кодированный сигнал запроса дальности (двухимпульсные посылки «Запрос Д»). Одновременно с излучением сигнала запроса дальности запускается измеритель времени в схеме измерения дальности.
Сигнал запроса дальности излучается через всенаправленную антенну на частоте f1 и принимается наземным приемным устройством (НПУ).
Наземный передатчик ответных сигналов дальности П-20Д на каждый запрос вырабатывает кодированный ответный сигнал дальности (двухимпульсные посылки «Ответ Д») (табл. 4.2), который излучает через всенаправленную антенну на частоте f3 (см. рис. 4.12). Этот сигнал принимается самолётным приёмником, декодируется и используется для выключения (остановки) измерителя времени. Измеренное время tD прямо пропорционально дальности от самолёта до наземного радиомаяка (время аппаратурной задержки в цепях бортового и наземного оборудования постоянно и учитывается при калибровке оборудования). Это время преобразуется в измеряемую дальность, которая поступает на индикаторы и вычислители.
Таблица 4.2
Таблица кодовых интервалов сигналов, применяемых в РСБН
Сигнал |
Вид кодированного сигнала |
|
Fсл, Гц |
Кодовые интервалы, мкс |
||||
1 |
2 |
3 |
4 |
|||||
Радиолиния «земля – борт» |
||||||||
Опорный «35» |
|
5,5 |
58,3 |
a=58 |
68 |
78 |
88 |
|
Опорный «36» |
|
5,5 |
60 |
a=18 |
28 |
38 |
48 |
|
«Ответ Д» |
|
1,5 |
30 |
a=14 |
16 |
18 |
20 |
|
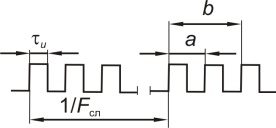
Запрос индикации |
|
1,5 |
300 |
a=6 b=12 |
8 14 |
10 16 |
12 18 |
|
Позывной |
|
1,5 |
300 |
a=6 b=12 c=16 |
8 14 18 |
10 16 20 |
12 18 22 |
|
Радиолиния «борт – земля» |
||||||||
«Запрос Д» |
|
1,5 |
30 |
a=25 |
19 |
21 |
23 |
|
Ответ индикации |
|
1,5 |
1,67 |
a=9 b=16 |
5 14 |
5 16 |
9 14 |
|
Опознавание |
Двухкратное повторение кода ответа индикации с интервалом 50…100 мкс |
|||||||
Применение различных частот и кодов для сигналов запроса дальности и ответа дальности повышает помехоустойчивость запросчиков к сигналам запроса дальности других ВС и предотвращает запуск дальномерного радиомаяка собственными сигналами, отраженными от местных предметов.
Кодирование состоит в задании определенных кодовых интервалов между импульсами двухимпульсной посылки (табл. 4.2). Величина кодового интервала определяется рабочим каналом.
Так как наземный дальномерный радиомаяк излучает ответные сигналы дальности через всенаправленную антенну всем запрашивающим самолетам на одной и той же частоте f3 и с одним и тем же кодом, то необходимо обеспечить прием на борту только «своих» ответных сигналов. Приём только «своих» ответных сигналов основывается на том факте, что задержка td практически не изменяется за один период ТП следования запросных сигналов (смещением самолёта за время нескольких периодов запроса можно пренебречь). С помощью специальной схемы осуществляется слежение за теми импульсами, задержка которых относительно запросных изменяется медленно. Именно эти импульсы используются для измерения дальности. Кроме того, период ТП следования запросных сигналов изменяется по случайному закону, поэтому «чужие» ответные сигналы дальности, являющиеся помехами, появляются в случайные моменты времени и не мешают измерению.
4.7. Принцип действия канала посадки систем типа РСБН
Канал посадки предназначен для определения угловых отклонений самолёта от линии курса (оси ВПП) в горизонтальной плоскости и от линии глиссады (номинальной траектории снижения) в вертикальной плоскости. Наземное оборудование канала посадки состоит из курсового (КРМ), глиссадного (ГРМ) и дальномерного (ДРМ) радиомаяков. КРМ обеспечивает получение на борту самолёта информации об отклонении от заданного курса посадки, ГРМ – об отклонении от заданной глиссады планирования, ДРМ обеспечивает измерение дальности до точки приземления. Курсовой радиомаяк работает на частотах канала азимута РСБН, а глиссадный и дальномерный радиомаяки – на частотах канала дальности.
Упрощенная
структурная схема тракта посадки
показана на рис. 4.14.
Рис. 4.14. Упрощенная
структурная схема тракта посадки
Принцип действия курсового и глиссадного радиомаяков аналогичен. Антенные устройства КРМ и ГРМ формируют по два луча (левый и правый – КРМ, верхний и нижний – ГРМ). Пересекаясь в пространстве, эти лучи образуют равносигнальные направления (РСН) в горизонтальной и вертикальной плоскостях соответственно (рис. 4.15) – плоскости курса и глиссады. Излучение производится поочередно левым и правым лучом в КРМ и верхним или нижним лучом в ГРМ. Частота коммутации лучей равна 12,5 Гц.
С целью различения лучей одновременно с их переключением изменяется частота модуляции излучаемых сигналов (частоты модуляции Fm указаны на рис. 4.14). Из рис. 4.15 видно, что если самолёт находится вблизи РСН, то уровень сигналов, принимаемых от обоих лепестков одинаков, как показано на рис. 4.16а. Если же самолёт отклоняется от РСН на некоторый угол εк по курсу (εг по глиссаде), то уровень сигналов, принимаемых по одному лепестку несколько увеличивается, а по другому – уменьшается. На рис. 4.16б показано такое измерение, для случая отклонения самолёта от РСН, показанного на рис. 4.15, уровень сигналов с частотой модуляции Fm = 2 100 Гц больше, чем с частотой модуляции Fm = 1 300 Гц.
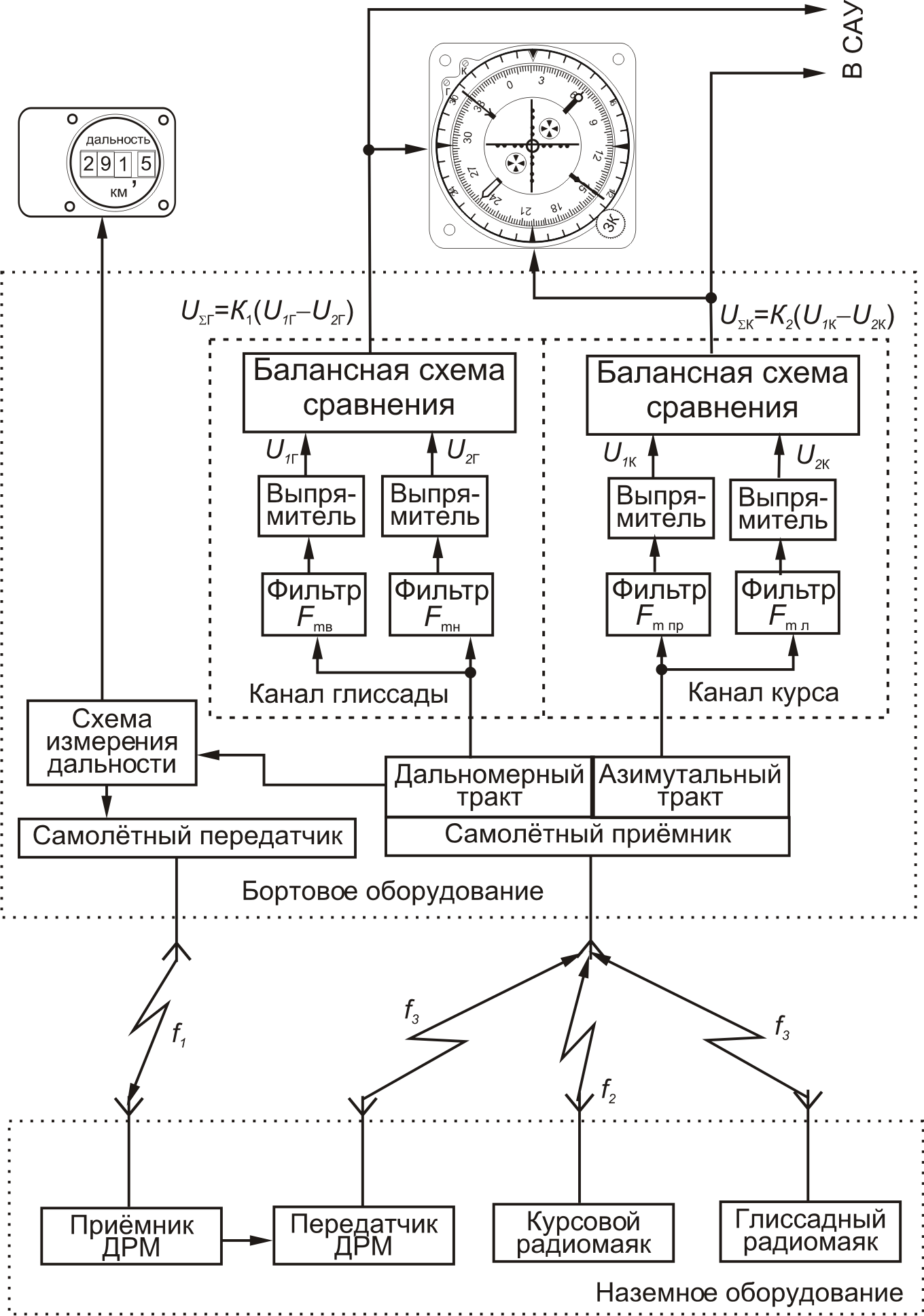
Рис. 4.14. Упрощенная
структурная схема тракта посадки
где U1 и U2 – амплитуды сигналов с частотами модуляции 1 300 Гц и 2 100 Гц.
Рис. 4.16. Вид
сигналов, принимаемых от КРМ (ГРМ): а)
при нахождении на РСН; б) при нахождении
левее (ниже) РСН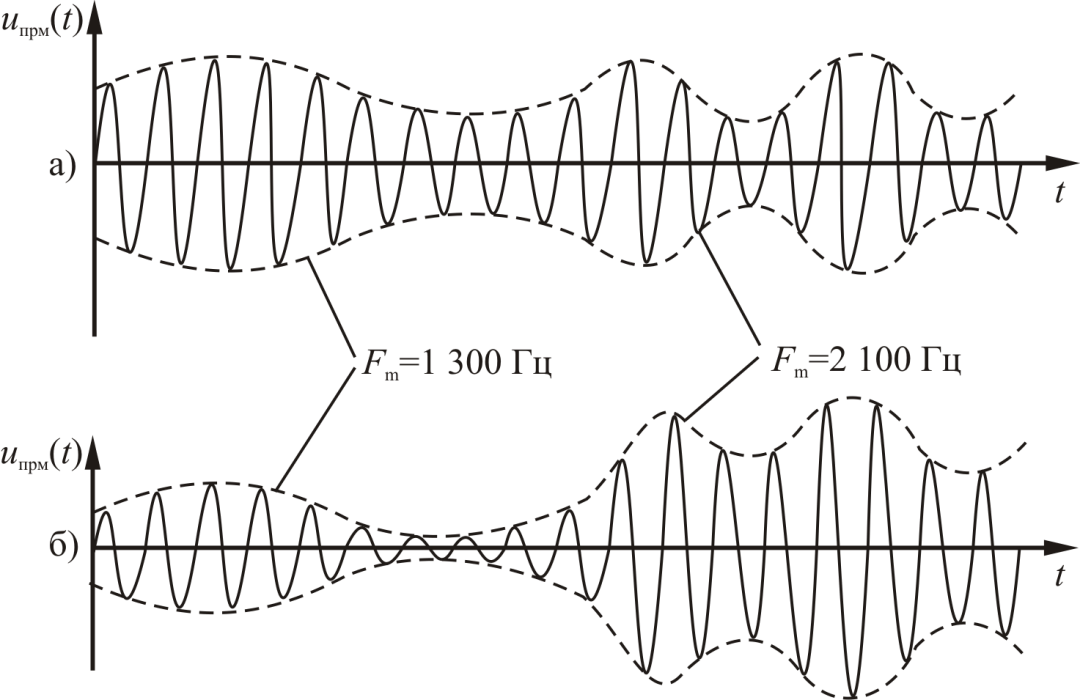
Величина
напряжения
![]() пропорциональна степени отклонения от
РСН (углу ε), а знак – определяет сторону
отклонения от РСН. Эти напряжения
выдаются в систему автоматического
управления (САУ) и, соответственно, в
курсовую (глиссадную) систему пилотажных
приборов.
пропорциональна степени отклонения от
РСН (углу ε), а знак – определяет сторону
отклонения от РСН. Эти напряжения
выдаются в систему автоматического
управления (САУ) и, соответственно, в
курсовую (глиссадную) систему пилотажных
приборов.
При посадке по пилотажным приборам положение самолёта относительно плоскости курса (глиссады) определяется по курсовой (глиссадной) планке, которая показывает положение соответствующей плоскости относительно самолета (кружок в центре прибора). Планки указывают направление доворота самолёта для возврата его на заданный курс (глиссаду). При правильном заходе на посадку обе планки должны проходить через центр пилотажного прибора (рис. 4.17).
4.8. Принцип действия канала наземной индикации систем типа РСБН
Координаты самолёта (азимут и дальность) в РСБН (см. рис. 4.1) могут определяться одновременно на борту и по наземному индикатору кругового обзора. Принцип действия наземного индикатора аналогичен принципу действия системы радиолокационного наблюдения с активным ответом. Функции запросчика выполняет наземное оборудование, а ответчика – самолётное оборудование (см. рис. 4.12).
Запросный сигнал индикации состоит из двух частей. В качестве запросного сигнала азимута используется азимутальный сигнал, излучаемый антенной передатчика П-200М, т.е. никакого специального запроса по азимуту не производится. Запросный сигнал дальности представляет собой трёхимпульсную посылку, излучаемую через передатчик П-20Д. Запускающие импульсы запроса дальности вырабатываются с помощью 180 магнитоэлектрических датчиков, установленных на оси антенны передатчика азимутального сигнала П-200М через каждые 2 по окружности, поэтому за один оборот антенны формируется 180 запускающих импульсов запроса дальности. Запросный сигнал дальности излучается всенаправлено через антенну передатчика П-20Д на частоте f3 при прохождении азимутальной антенной значений азимута, кратных 2.
На борту самолёта в приёмнике запросный сигнал дешифрируется и, при совпадении по времени азимутального сигнала и запросного сигнала дальности, формируется запускающий импульс ответа дальности. Самолётный передатчик с приходом каждого запускающего импульса вырабатывает трёхимпульсный ответный сигнал дальности. Таким образом, несмотря на то, что запросный сигнал дальности излучается непрерывно, отвечать на запрос будут не все самолеты сразу, а только тот, на который в данный момент направлена ось диаграммы направленности антенны передатчика азимутального сигнала П-200М. За счет этого и определяется азимут самолёта на земле. Дальность же определяется также как и на борту – по задержке ответного сигнала.
Одновременно с излучением запросного сигнала дальности запускается радиальная развертка индикатора кругового обзора (ИКО), положение которой по азимуту соответствует положению оси диаграммы направленности азимутальной антенны относительно истинного меридиана. Линия радиальной развертки ИКО вращается синхронно с азимутальной антенной. При поступлении на ИКО ответного сигнала дальности на его экране формируется яркостная отметка.
Так как экран ИКО проградуирован по азимуту и дальности, то легко определить соответствующие координаты самолётов (рис. 4.18).
Кроме определения координат самолётов имеется также дополнительная возможность индивидуального опознавания самолётов. Для опознавания оператор наземного радиомаяка РСБН по УКВ радиостанции дает указания летчику нажать кнопку ОПОЗНАВАНИЕ. При нажатии кнопки бортовой передатчик РСБН автоматически вырабатывает двойную трёхимпульсную кодовую посылку ответного сигнала. Задержка излучения повторного ответного сигнала в режиме «Опознавание» составляет 30…60 мкс, поэтому метка опознавания появляется на одном азимуте с меткой положения самолёта, но на несколько большей дальности (рис. 4.18).
 Каждому
наземному радиомаяку РСБН присваивается
двухбуквенный позывной, который
излучается непрерывно со скоростью 20
знаков в минуту с помощью запросных
сигналов дальности путем дополнительной
манипуляции запросных сигналов дальности
соответствующим телеграфным сигналом.
Каждому
наземному радиомаяку РСБН присваивается
двухбуквенный позывной, который
излучается непрерывно со скоростью 20
знаков в минуту с помощью запросных
сигналов дальности путем дополнительной
манипуляции запросных сигналов дальности
соответствующим телеграфным сигналом.
В бортовом приёмнике позывные выделяются и подаются в сеть внутренней связи. Позывные служат для идентификации радиомаяка РСБН и позволяют проконтролировать правильность настройки на заданный рабочий канал РСБН.
4.9. Принцип действия тракта межсамолётной навигации
Самолетная аппаратура некоторых типов РСБН обеспечивает измерение и непрерывную индикацию дальности до другого самолёта, а также определение направления на него относительно продольной оси самолёта (см. рис. 4.2). Упрощенная структурная схема тракта межсамолётной навигации (МСН) показана на рис. 4.19.
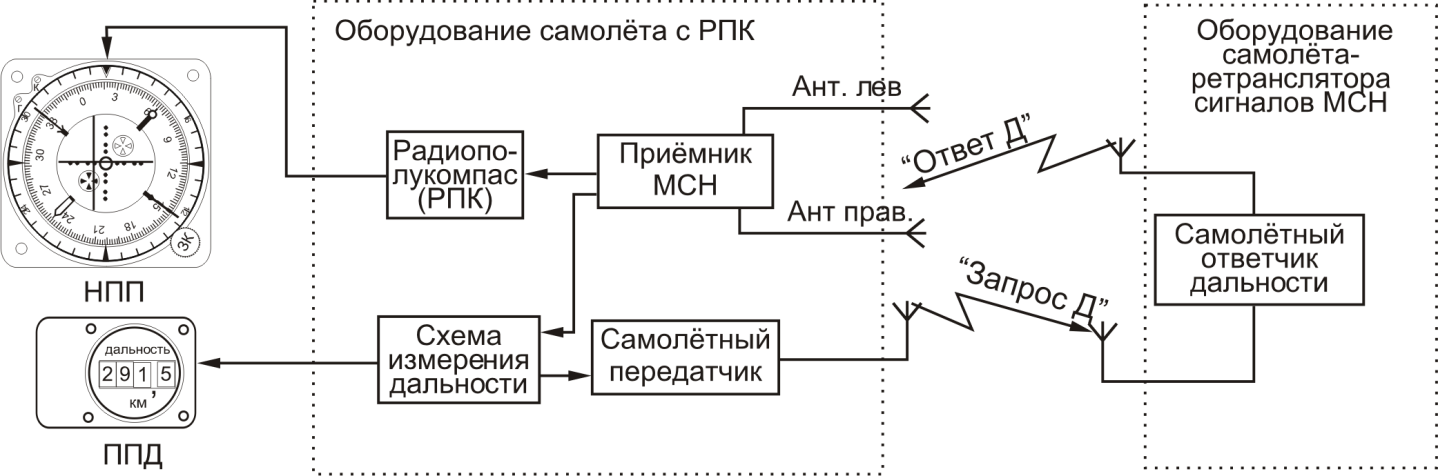
Рис. 4.19. Упрощенная
структурная схема тракта межсамолётной
навигации
Кроме того, ответные сигналы с приёмника МСН поступают на радиополукомпас (РПК), предназначенный для определения направления на самолёт-ретранслятор относительно продольной оси пеленгующего самолёта. Определение направления на другой самолёт основано на сравнении амплитуд ответных сигналов, принимаемых на две (правую и левую) антенны направленного действия. Диаграммы направленности этих приёмных антенн в горизонтальной плоскости представляют собой кардиоиды (рис. 4.20), ориентированные так, что точки их пересечения лежат на линии, совпадающей с продольной осью самолёта.
В результате такого пересечения диаграмм направленности образуется равносигнальная зона (РСЗ), совпадающая с продольной осью самолёта. Схема радиополукомпаса работает одновременно со схемой измерения дальности.
Поскольку ответные сигналы, принятые правой и левой антеннами поступают в общий приёмный тракт приёмника МСН, то для их разделения применяется временная коммутация антенн. Антенны подключаются к входу приёмника МСН поочередно с помощью антенного коммутатора. Режим коммутации организуется так, что если в момент прихода некоторого ответного сигнала подключена левая антенна, то в момент прихода следующего будет подключена правая, а левая отключена т.д. Антенны коммутируются только при устойчивом измерении дальности. Таким образом, половина ответных импульсов uотв поступает в приёмный тракт от левой антенны, другая половина – от правой, как показано на рис. 4.20.
Рис. 4.20. К пояснению
принципа действия тракта межсамолётной
навигации:
а)
пеленгуемый самолёт справа от РСЗ;
б)
пеленгуемый самолёт на РСЗ;
в)
пеленгуемый самолёт слева от РСЗ
Благодаря направленным свойствам антенн амплитуда сигналов uлев и uпр зависит от углового положения самолёта-ретранслятора относительно продольной оси пеленгующего самолёта (от угла εрпк). При расположении ретранслятора справа от продольной оси (рис. 4.20а) ипр>илев, при расположении его слева (рис. 4.20в) ипр<илев. Если же направление на ретранслятор совпадает с продольной осью пеленгующего самолёта (рис. 4.20б), то ипр = илев.
Схема РПК формирует напряжение иε рпк пропорциональное разности амплитуд сигналов антенн, а значит и величине отклонения от оси εрп. Полярность иε рпк определяет сторону отклонения (вправо или влево). Это напряжение подаётся на отклоняющую систему курсовой планки пилотажных приборов. Положение планки (рис. 4.20) соответствует положению пеленгуемого самолёта относительно продольной оси пеленгующего самолёта.
При нахождении пеленгуемого самолёта на продолжении продольной оси пеленгующего самолёта курсовая планка должна находиться в центре шкалы прибора (рис. 4.20б).
4.10. Угломерно-дальномерная радионавигационная система VOR/DME
В качестве угломерной системы распространение в странах организации ICAO получила система VOR (Very high frequency Omni directional Range beacon) и дальномерная система DME (Distance Measuring Equipment), которые могут быть использованы раздельно и совместно. Система VOR/DME предназначена для непрерывного и автоматического определения азимута относительно наземной станции системы и дальности от станции до самолёта.
В азимутальный и дальномерный каналы входит наземное и бортовое оборудование. Каждый канал работает на разных частотах и представляет собой самостоятельные радионавигационные устройства, которые могут использоваться совместно и раздельно. На самолётах, где установлена бортовая аппаратура «Курс-МП», возможно непрерывное и автоматическое измерение азимута самолёта относительно наземного маяка VOR. При наличии на борту самолёта дальномерного оборудования (самый распространённый – самолётный дальномер СД-67) возможно непрерывное и автоматическое измерение дальности до наземного радиомаяка (при совместно работающих маяках VOR/DME).
Наземный радиомаяк VOR. Используются несколько разновидностей азимутальных радиомаяков VOR: трассовый радиомаяк категории А (предназначен для обеспечения полётов по воздушным трассам), маяк категории В (устанавливается на аэродромах для обеспечения привода самолётов в район аэродрома и построения манёвра захода на посадку). Маяки обеих категорий могут быть стандартными (рис. 4.21а), двухполосными доплеровскими DVOR (Doppler Very high frequency Omni directional Range beacon) (рис. 4.21б) и прецизионными (точными) PDVOR (Precision Doppler Very high frequency Omni directional Range beacon).

а) б)
Рис. 4.21. Наземный радиомаяк VOR:
а) стандартный радиомаяк;
б) двухполосный доплеровский радиомаяк DVOR
На некоторых аэродромах устанавливаются комбинированные маяки, объединяющие первые два вида (рис. 4.22). Основные тактико-технические характеристики маяков VOR/DME представлены в табл. 4.3.
Таблица 4.3