

3.2. Подсистемы машинной графики (мг)
и геометрического моделирования (ГМ)
Подсистемы МГ и ГМ – занимают центральное место в САПР маши-
ностроения.
Геометрическая модель – математический объект, отражающий фор- му деталей, состав сборочных узлов и до- полнительные параметры (масса, момент инерции, цвет…). В памяти ЭВМ модели обычно хранятся в векторной форме, т.е. в виде координат сово- купности точек, задающих элементы модели.
Процедуры в подсистемах МГ и ГМ:
− получение проектного решения (концепция)
− представление решения в виде геометрической модели
− визуализация
− корректировка (при необходимости)
Разновидности математического обеспечения МГ и ГМ
2D - моделирование:
− чертежная документация;
− технологические схемы
3D - моделирование:
− синтез конструкции;
− представление кинематики;
− инженерный анализ (прочность, жесткость…)
Виды 3D - моделей:
Каркасная модель:
− представляет форму деталей в виде конечного множества линий. Для каждой линии известны координаты концевых точек и функция ли-
нии (используется редко в специальных задачах).
Поверхностная модель:
− представляет форму деталей с помощью ограничивающих ее по-
верхностей (данные о гранях, вершинах, ребрах, функции поверхно- стей) (особое место - в моделировании транспорта, корпуса аэроди- намических поверхностей, лопатки, обшивки фюзеляжа…)
Объемные модели:
− дополнительно содержат в явной форме сведения о принадлежности элементов внутреннему или внешнему по отношению к детали про- странству.
38
3.3. Подходы к построению геометрических моделей
1. Задание граничных элементов – граней, ребер, вершин.
2. Позиционный подход – рассматриваемое пространство разбивают на ячейки (позиции). Деталь задают массивом индексов принадлеж- ности ячеек детали.
3. Метод конструктивной геометрии – представление сложной дета- ли в виде совокупности базовых элементов формы и выполнения над ними теоретико-множественных (логических) операций. Основ- ной способ конструирования в машиностроении.
Базовые элементы формы – заранее разработанные модели простых тел:

Теоретико-множественные (логические) операции:

− пересечение
− вычитание (разность).
4. Кинематический метод – задают траектории перемещения двумер- ных контуров (объектов) След перемещения контура принимают в качестве поверхности детали. Разновидности:
А) выдавливание (экструзия) Б) вращение

39
3.4. Параметризация
ПАРАМЕТРИЧЕСКОЕ моделирование – метод описания формы объекта путем задания параметров разме- ров, формы расположения и других характеристик, в виде числовых значений или других связей.
Наличие параметризации обеспечивает:
Возможность эскизного проектирования: без задания точных окончательных размеров во время первоначального построе- ния эскиза. Указание точных требуемых размеров и других параметров в более позднее время позволяет получить точ- ную деталь с любыми желаемыми вариантами размеров.
Позволяет в любое время получить новую модификацию из- делия с новыми параметрами. Используется одна и та же кон- цепт модель.
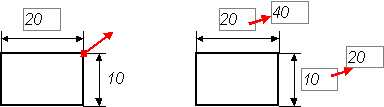
Наличие двунаправленной ассоциативной связи между гео-
метрической моделью и размерами.
1) Смещение узла приводит к измене-
нию образмеривания:
2) Изменение числового значения размера приводит к смещению узла геометрии:
Возможность задания размеров в виде именованных пара-
метров (буквенно-цифровых) и задания для них значений либо числовых, либо в виде уравнения связи с какими-либо
другими параметрами.
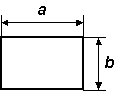
Если изменится «a», то сразу же изменит-
ся «b».
40
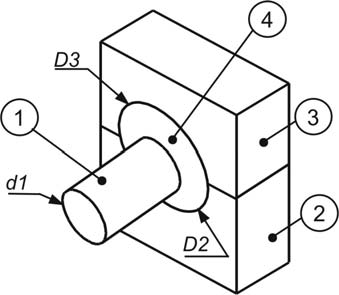
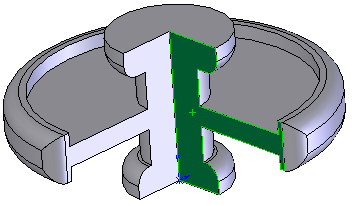
Для дет.2: D2=60
Для дет.3: D3=D2
Для дет.4: dvnutr=d1; Dnar=D2
Какую бы комбинацию вала и корпуса не задали, втулка (или подшипник) при- мет принудительно нужную форму.
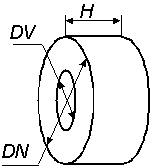
Возможность получать сразу много конфигураций детали, имея одну концепт-модель и таблицу (базу данных) параметров.
Концепт модель Таблица параметров
Name
H
DV
DN
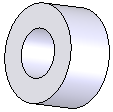
Mod1
50
25
50
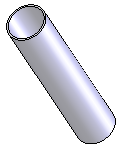
Mod2
1000
48
50
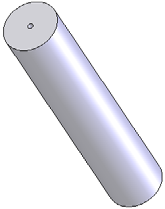
Mod3
2
10
100
Mod4
1000
1
50
Mod1 |
Mod3 |
Mod4 |
Mod2 |
|
|
|
|
АДАПТИВНАЯ параметризация – создается модель без первона- чальных позиционных ограничений на ее конструк- тивные элементы. Затем можно быстро и оперативно вносить изменения в модель, активизируя парамет- ры. Можно просмотреть различные варианты. На любом этапе можно модифицировать модель и вы- брать окончательный вариант.
ПРИНУДИТЕЛЬНАЯ параметризация – предполагает описание ха- рактеристик математическими соотношениями, или отношениями совокупности связанных между собой геометрических элементов конструкции.
41