

Базис в r2 и r3
Проекция вектора на ось
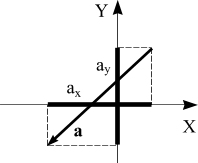
Проекцией вектора на ось называется вектор, который получается в результате перемножения скалярной проекции вектора на эту ось и единичного вектора этой оси. Например, если аx – скалярная проекция вектора а на ось X, то аx·i - его векторная проекция на эту ось.
Обозначим векторную проекцию также,
как и сам вектор, но с индексом той оси
на которую вектор проектируется. Так,
векторную проекцию вектора а на ось Х
обозначим аx (жирная буква, обозначающая
вектор и нижний индекс названия оси)
или
![]() (нежирная буква, обозначающая вектор,
но со стрелкой наверху (!) и нижний индекс
названия оси).
(нежирная буква, обозначающая вектор,
но со стрелкой наверху (!) и нижний индекс
названия оси).

Скалярной проекцией вектора на ось называется число, абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между проекциями точки начала и точки конца вектора. Обычно вместо выражения скалярная проекция говорят просто – проекция. Проекция обозначается той же буквой, что и проектируемый вектор (в обычном, нежирном написании), с нижним (как правило) индексом названия оси, на которую этот вектор проектируется. Например, если на ось Х проектируется вектора, то его проекция обозначается аx. При проектировании этого же вектора на другую ось, если ось Y , его проекция будет обозначаться аy .
Чтобы вычислить проекцию вектора на ось (например, ось X) надо из координаты точки его конца вычесть координату точки начала, то есть аx = хк − xн.
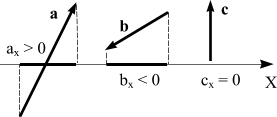
Проекция вектора на ось - это число. Причем, проекция может быть положительной, если величина хк больше величины хн, отрицательной, если величина хк меньше величины хн и равной нулю, если хк равно хн .
Проекцию вектора на ось можно также найти, зная модуль вектора и угол, который он составляет с этой осью.
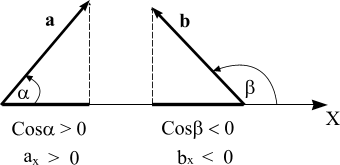
Из рисунка видно, что аx = а Cos α
то есть, проекция вектора на ось равна произведению модуля вектора на косинус угла между направлением оси и направлением вектора. Если угол острый, то
Cos α > 0 и аx > 0, а, если тупой, то косинус тупого угла отрицателен, и проекция вектора на ось тоже будет отрицательна.
Углы, отсчитываемые от оси против хода часовой стрелки, принято считать положительными, а по ходу - отрицательными. Однако, поскольку косинус – функция четная, то есть, Cos α = Cos (− α), то при вычислении проекций углы можно отсчитывать как по ходу часовой стрелки, так и против.
Чтобы найти проекцию вектора на ось надо модуль этого вектора умножить на косинус угла между направлением оси и направлением вектора.
11.Ортонормированный базис. Декартовы координаты вектора.
Определение. Базис называется ортонормированным, если его векторы попарно ортогональны и равны единице.
Определение. Декартова система координат, базис которой ортонормирован называется декартовой прямоугольной системой координат.
Пример. Даны векторы
![]() (1;
2; 3),
(1;
2; 3),
![]() (-1;
0; 3),
(-1;
0; 3),
![]() (2;
1; -1) и
(2;
1; -1) и
![]() (3;
2; 2) в некотором базисе. Показать, что
векторы
,
и
образуют базис и найти координаты
вектора
в этом базисе.
(3;
2; 2) в некотором базисе. Показать, что
векторы
,
и
образуют базис и найти координаты
вектора
в этом базисе.
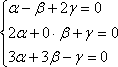
Векторы образуют базис, если они линейно независимы, другими словами, если уравнения, входящие в систему:
 линейно независимы.
линейно независимы.
Тогда
![]()
Это условие выполняется, если определитель матрицы системы отличен от нуля.



 Для решения этой системы
воспользуемся методом Крамера.
Для решения этой системы
воспользуемся методом Крамера.
D1 =

![]()
D2 =

![]()
D3 =

![]()
Итого, координаты вектора в базисе , , : { -1/4, 7/4, 5/2}.
12.Скалярное произведение векторов
Теория: http://a-geometry.narod.ru/theory/theory_31.htm
13. Векторное произведение векторов
Теория: http://a-geometry.narod.ru/theory/theory_32.htm
14. Смешанное произведение векторов
Теория: http://a-geometry.narod.ru/theory/theory_33.htm
15. Общее уравнение прямой на плоскости
Ах + Ву + С = 0 где A, B и C — произвольные постоянные, причем постоянные A и B не равны нулю одновременно. Вектор с координатами (A,B) называется нормальным вектором и он перпендикулярен прямой. Вектор с координатами (-B,A) или (B,-A) называется направляющим вектором.
При C = 0 прямая проходит через начало координат. Также уравнение можно переписать в виде :
А( х – х0 ) + В( у – у0 ) = 0
В зависимости от значений постоянных А,В и С возможны следующие частные случаи:
• C = 0, А ≠0, В ≠ 0 – прямая проходит через начало координат
• А = 0, В ≠0, С ≠0 { By + C = 0}- прямая параллельна оси Ох
• В = 0, А ≠0, С ≠ 0 { Ax + C = 0} – прямая параллельна оси Оу
• В = С = 0, А ≠0 – прямая совпадает с осью Оу
• А = С = 0, В ≠0 – прямая совпадает с осью Ох