

13.4. Классификация ракетных двигателей систем управления. Управление движением кла с помощью ракетного двигателя
Ракетные двигатели можно условно классифицировать по источнику используемой энергии, а также по агрегатному состоянию применяемого топлива.
Рис. 13.3. Классификация ракетных двигателей систем управления
Управление движением КЛА с помощью ракетного двигателя можно представить следующим образом.
Угловое положение КЛА относительно центра масс однозначно определяется тремя углами: углом курса, углом тангажа и углом крена.
Предположим, что в плоскости угла крена возник возмущающий момент, постоянный по времени, который приводит к отклонению КЛА с постоянным угловым ускорением по крену. Для компенсации этого возмущающего момента, очевидно, необходимо создать управляющий момент, равный возмущающему моменту по величине и противоположный по направлению. Этот момент можно создать включением двух соответствующих ракетных двигателей, которые своей тягой создают пару сил, образующих момент.
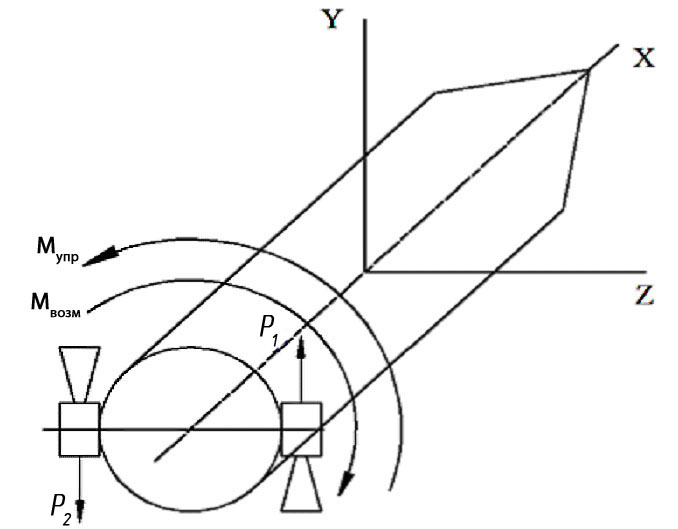
Рис. 13.4. Управление движением КЛА с помощью ракетных двигателей
Но как поступить, если возмущающий момент по величине стал меньше? Поскольку тяга ракетных двигателей постоянна (регулирование тяги ракетных двигателей представляет собой отдельную, довольно сложную для решения задачу) и установлены двигатели на КЛА определенным образом, т.е. «плечо» (расстояние между линиями действия сил тяги) тоже постоянно, то и управляющий момент, создаваемый двигателями постоянен.
Поэтому, если для компенсации меньшего возмущающего момента снова включить двигатели, то произойдет не только компенсация возмущающего момента, но начнется вращение КЛА в направлении действия управляющего момента.
Выход из создавшегося положения видится в импульсивном включении двигателей с определенными временами включений и пауз, что в среднем должно быть эквивалентно необходимому моменту для компенсации возмущающего момента.

Рис. 13.5. Компенсация возмущающего момента
Именно это обстоятельство – импульсный режим работы двигателей в системе управления – является самым существенным отличием ЖРД малой тяги от маршевого ЖРД.
13.5. Динамические характеристики жрдмт
Жидкостной ракетный двигатель представляет собой изделие, в состав которого входит один или два клапана, которые служат для подачи компонентов топлива во внутренние полости форсуночной головки. Чаще всего привод клапана выполняют электромагнитным.
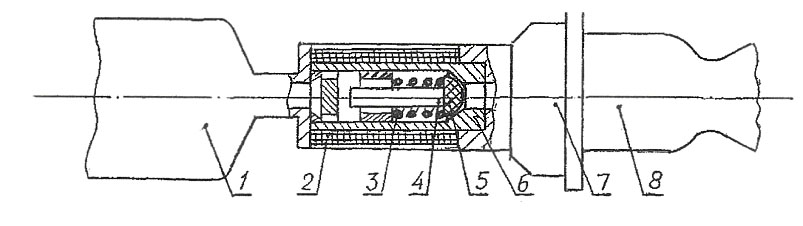
Рис. 13.6. Схема электромагнитного клапана
1 – бак компонента топлива; 2 – электромагнит клапана; 3 – пружина; 4 – якорь; 5 – запорный элемент; 6 – седло; 7 – форсуночная головка двигателя; 8 – двигатель
Электромагнитный клапан предназначен для сообщения полостей форсуночной головки с топливоподводящими магистралями во время работы двигателя и герметичного их разобщения во время пауз. Электромагнитный клапан нормально закрыт.
При подаче напряжения на клапан обмотка электромагнита создает магнитное поле, воздействующее на якорь. Якорь, преодолевая усилие пружины и усилие от давления компонента топлива, перемещается вместе с запорным элементом на величину хода. Запорный элемент отходит от седла, открывая через отверстие в седле доступ топлива в форсуночную головку.
При снятии напряжения с электромагнита якорь вместе с запорным элементом перемещается к седлу и перекрывает отверстие для подачи компонента в форсуночную головку двигателя.
Идеальный ЖРДМТ должен выдавать импульс тяги прямоугольной формы, равный по длительности электрической команде от логически-преобразующего блока. Однако, реальный импульс тяги значительно отличается от идеального.
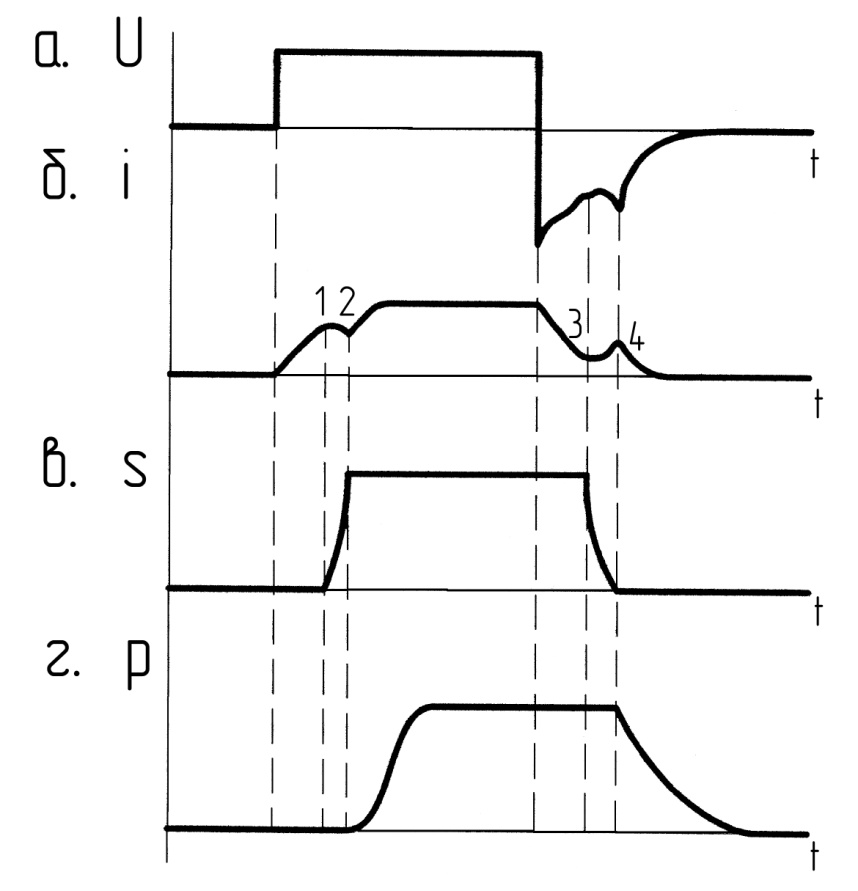
Рис. 13.7. Временные диаграммы изменения параметров ЖРДМТ:
а – зависимость напряжения питания от времени;
б – зависимость тока электроклапана от времени;
в – зависимость хода клапана от времени;
г – зависимость давления в камере от времени;
1 – начало движения якоря при открытии;
2 – посадка якоря на «стоп» при открытии;
3 – начало движения якоря при закрытии;
4 – посадка запорного элемента на седло при закрытии
При подаче команды на электроклапан двигателя в виде электрического импульса напряжения ток в обмотке электромагнита вследствие явления электромагнитной индукции нарастает постепенно, пока не станет равным силе тока трогания. Начинается движения якоря, при этом сила тока несколько падает до момента посадки якоря на «стоп», а затем вновь возрастает до стационарного значения. Интервал времени, отмеченный точками 1 и 2, соответствует времени движения якоря. В момент снятия электрического напряжения с клапана также возникает ЭДС самоиндукции. В связи с этим ток в обмотке электромагнита не исчезает мгновенно, а движение клапана начинается лишь тогда, когда сила тока достигает такой величины, когда усилия электромагнита уже недостаточно для удержания клапана в открытом положении.
Давление в камере сгорания при пуске двигателя начинает возрастать через некоторое время после открытия клапана. Это время необходимо для заполнения заклапанных объемов. Очевидно, чем меньше время заполнения заклапанных объемов, тем быстрее начинается рост давления в камере, и тем меньше отличие реального импульса от идеального.
При останове двигателя давление в камере сгорания остается неизменным до момента закрытия клапана. Падение давления в камере сгорания до нуля после закрытия клапана происходит не мгновенно, а в течение некоторого времени, за которое происходит опорожнение заклапанных объемов. Так как тяга двигателя прямо пропорциональна давлению в камере сгорания, то при снятии напряжения питания с электромагнитного клапана тяга двигателя также падает до нуля в течение того же времени. Это время называется временем последействия, а выдаваемый двигателем за это время импульс тяги называется импульсом последействия.
Для оценки времени выхода двигателя на режим при пуске вводится время t0.9, которое определяется временем набора давления в камере сгорания (или тяги) до уровня, равного 90% от номинального значения с момента подачи командного сигнала на электроклапаны двигателя. При этом под номинальным уровнем давления в камере сгорания (тяги) понимается давление в камере сгорания (тяги) двигателя при установившемся режиме работы.
Аналогично,
при выключении двигателя вводится время

 ,
которое определяется временем спада
давления в камере сгорания (или тяга)
до уровня, равного 10% от номинального
значения с момента снятия командного
сигнала с электроклапанов двигателя.
,
которое определяется временем спада
давления в камере сгорания (или тяга)
до уровня, равного 10% от номинального
значения с момента снятия командного
сигнала с электроклапанов двигателя.
Вместо
90% и 10% уровней давления в камере сгорания
(тяги) пользуются соответственно 95% и
5%, а также 70% и 20% и другими уровнями.
Тогда время обозначают t0.95 и
и

 ,
а также t0.7
,
а также t0.7 и
и

 или другими соответствующими обозначениями.
или другими соответствующими обозначениями.
Указанные
времена t0.9
и
 являются основными динамическими
параметрами, характеризующими
приемистость, или быстродействие,
двигателя. Очевидно, что система
управления КЛА будет работать более
эффективно, если времена t0.9
и
будут минимальны, т.е. быстродействие
двигателя максимальным.
являются основными динамическими
параметрами, характеризующими
приемистость, или быстродействие,
двигателя. Очевидно, что система
управления КЛА будет работать более
эффективно, если времена t0.9
и
будут минимальны, т.е. быстродействие
двигателя максимальным.
Это одно из основных требований к ЖРДМТ.