

14.Уравновешивание механизмов. Условия уравновешивания.
При работе машины её механизм оказывает воздействие на корпус машины (стойку), установленныйна специальном основании (фундаменте
Таким образом, воздействие механизма на основание складываются из двух составляющих :
1.
Создаваемой действием активных
сил и моментов
![]() ,
где
-
вес звеньев, условно не учтённый в
уравнениях (17,3) , (17,4).
,
где
-
вес звеньев, условно не учтённый в
уравнениях (17,3) , (17,4).
2.
Динамической,
вызванной ускоренным движением звеньев
и возникающими при этом их силами инерции
![]() и
моментами сил инерции
и
моментами сил инерции
![]() .
.
Динамическая составляющая изменяется циклически, вызывая вибрацию основания. Устранение этой составляющей называют уравновешиванием механизма. Условия уравновешенности запишутся в виде:
![]() (17.5)
(17.5)
![]() (17.6)
(17.6)
15.Уравновешивание механизмов. Статическое уравновешивание плоских механизмов.
Рассмотрим плоский четырёхзвенный механизм (рис.17.2).
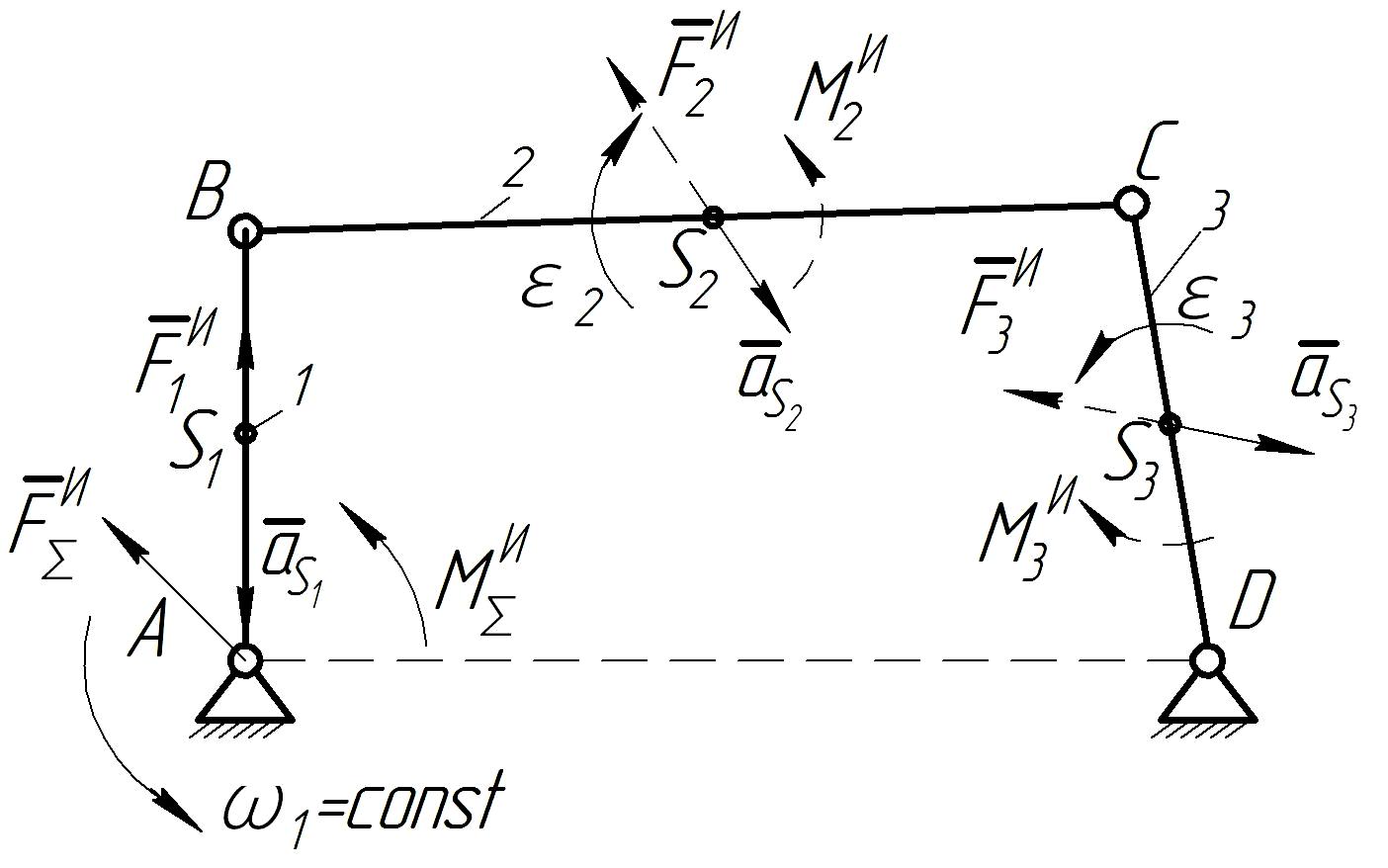
Рис. 17.2.
На
звенья 1,2,3
механизма действуют силы инерции
![]() приложенные в центрах масс
приложенные в центрах масс
![]() звеньев, и моменты сил инерции
звеньев, и моменты сил инерции
![]()
Приведем эту систему силовых факторов к центру А. В результате получим главный вектор и главный момент сил инерции, нагружающих основание:
![]() (17.7)
(17.7)
![]() (17.8)
(17.8)
Возможны два варианта действия этих силовых факторов :
1.
![]() - механизм статически неуравновешен ;
- механизм статически неуравновешен ;
2.
![]() - механизм имеет моментную неуравновешенность.
- механизм имеет моментную неуравновешенность.
Статическое уравновешивание механизма.
Для
его реализации необходимо обеспечить
![]() ,
где
,
где
![]() -
масса системы всех «n»
подвижных звеньев механизма,
-
масса системы всех «n»
подвижных звеньев механизма,
![]() -
ускорение центра масс
-
ускорение центра масс
![]() этой
системы. Отсюда следует условие
уравновешенности
=0.
Его можно обеспечить, сделав
центр масс
этой
системы. Отсюда следует условие
уравновешенности
=0.
Его можно обеспечить, сделав
центр масс
![]() неподвижным.
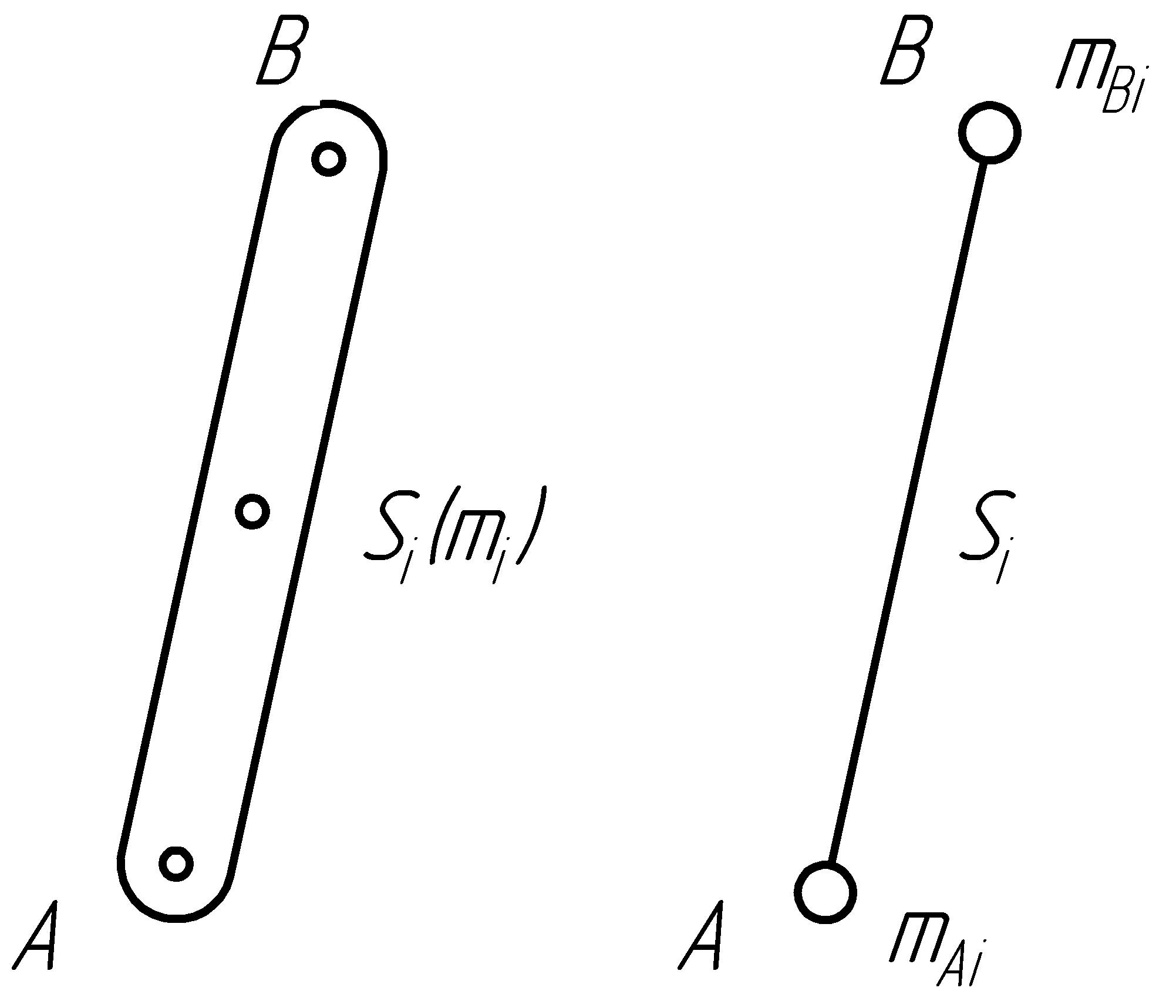
Для этого используют метод заменяющих
масс звеньев:
неподвижным.
Для этого используют метод заменяющих
масс звеньев:
-
каждое звено i
массой
![]() заменяют моделью из двух масс
заменяют моделью из двух масс
![]() и
и
![]() .
.
- массы модели находят из уравнений:
![]()
Применив этот метод к звеньям 1,2,3 четырёхзвенника, получим эквивалентную модель на рисунке 17.3.
В
ней массы (![]() ),
(
),
(![]() ),
(
),
(![]() )
– это массы звеньев 1,2,3,
распределённые по точкам А,
В, С,
)
– это массы звеньев 1,2,3,
распределённые по точкам А,
В, С,
![]() .
.
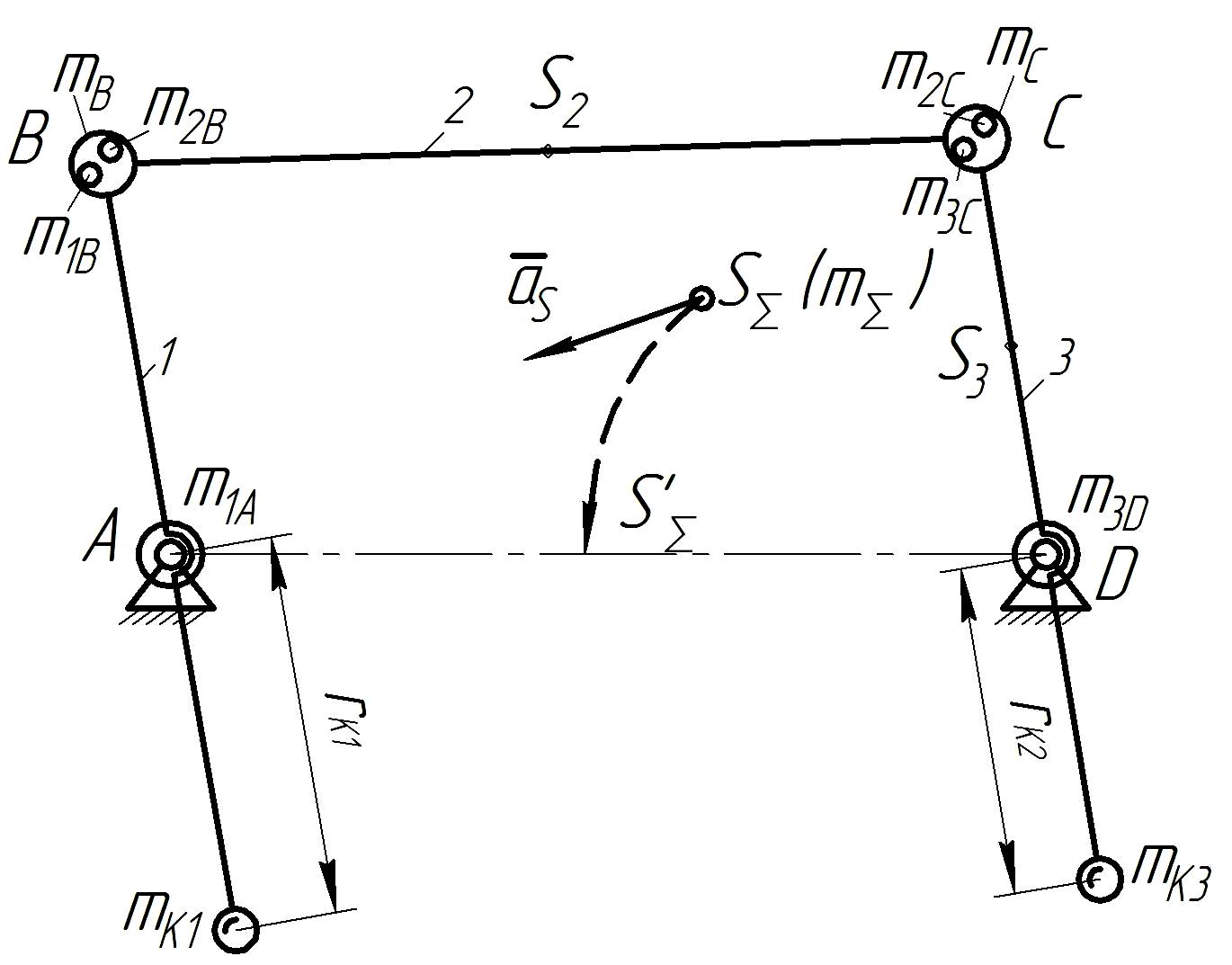
Рис. 17.3.
Теперь
для уравновешивания масс
![]() (относительно
осей вращения А
и
)
установим на звеньях 1
и 3
противовесы (корректирующие массы)
(относительно
осей вращения А
и
)
установим на звеньях 1
и 3
противовесы (корректирующие массы)
![]() и
и
![]() так,
чтобы выполнялись условия
так,
чтобы выполнялись условия
![]() ,
,
![]() Благодаря этому центр масс системы
Благодаря этому центр масс системы
![]() сместится в точку А
стойки, системы
сместится в точку А
стойки, системы
![]() - в точку
стойки, а всего механизма – в точку
- в точку
стойки, а всего механизма – в точку
![]() стойки.
Механизм
уравновешен.
стойки.
Механизм
уравновешен.
20.Синтез плоских рычажных механизмов с нкп. Условие существования кривошипа. Синтез плоских механизмов по средней скорости выходного звена.
Синтез состоит в проектировании механизма, отвечающего требуемым показателям. В целом процесс проектирования включает этапы:
1. Структурный синтез – разработка структурной схемы механизма. Кинематический синтез, включающий определение геометрических размеров (параметров) звеньев, обеспечивающих требуемые кинематические характеристики механизма и их воспроизведение с необходимой точностью.
2. Динамический синтез – выбор и определение инерционных параметров звеньев (масс, моментов инерции и др.), обеспечивающих требуемые динамические свойства механизма.
3. Разработка конструктивных форм составных частей механизма (звеньев и др.), обеспечивающих их прочность и долговечность.
4. Оценка технико-экономических показателей механизма.
Основная задача синтеза – разработка оптимального варианта проектируемого механизма, который должен иметь требуемые технико-экономические характеристики. Для этого составляют критерий оптимизации – целевую функцию как выражение основного условия синтеза, т.е. его качества.
Целевая функция должна содержать параметры синтеза:
входные: а) установленные техническим заданием на проектирование как обязательные; б) дополнительные, варьируемые в процессе синтеза как ограничения, например, на длины, массы и моменты инерции звеньев, на углы давления в кинематических парах и т.п.; в) конструктивные;
выходные, соответствующие оптимальному варианту механизма как цели его проектирования.
При синтезе могут использоваться дополнительные критерии качества в составе целевой функции.
Метод кинематического синтеза определяется видом механизма. По принципу использования выделяют:
1. Передаточные механизмы – реализуют заданную функциональную зависимость между положениями и перемещениями входного и выходного звеньев.
2. Направляющие механизмы – реализуют заданную траекторию движения выходного звена или его отдельной точки.
Условие существования кривошипа
При синтезе механизма необходимо обеспечить проворачиваемость его звеньев.
1. Рассмотрим плоский шарнирный четырехзвенник OABC (рис. 7.1)
Чтобы звено OA могло быть кривошипом, оно при вращении должно пройти через крайние положения ОА1 и ОА2.
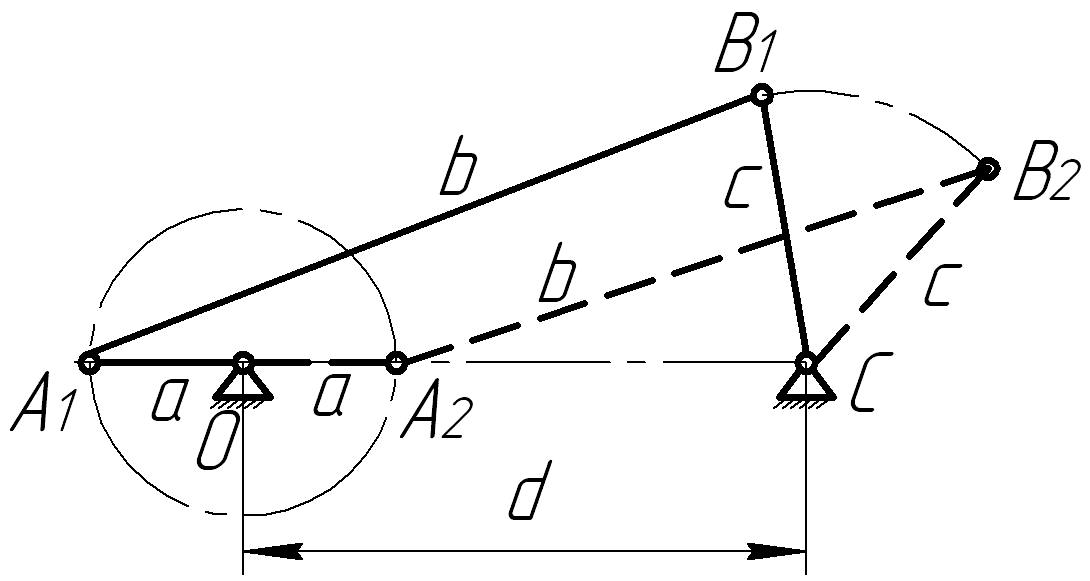
Рис. 7.1.
Полагаем, что а – длина самого короткого звена четырехзвенника, d – самого длинного. Используя известное соотношение между длинами сторон треугольника, запишем неравенства:
из
![]()
![]() ;
(7.1)
;
(7.1)
из
![]()
![]() .
. (7.2)
.
. (7.2)
Неравенство (7.1) всегда обеспечит выполнение неравенства (7.2). Если самым длинным будет звено AB или BC, то неравенство (7.1) также выполняется. Поэтому справедливо правило: «самое короткое звено четырехзвенника может быть кривошипом, если сумма длин самого длинного и самого короткого звеньев меньше суммы длин остальных звеньев». Соотношение (7.1) выражает это правило Грасгофа.
В зависимости от соотношения длин звеньев, четырехзвенник может быть:
кривошипно-коромысловым механизмом, если выполняется неравенство (7.1). В нем звено BC – коромысло, а звено OC – стойка;
двухкривошипным механизмом, если выполняется неравенство (7.1), но за стойку принято самое короткое звено OA. В нем звенья AB и OC – кривошипы.
двухкоромысловым механизмом, если неравенство (7.1) не выполняется. В нем звенья OA и BC будут коромыслами.
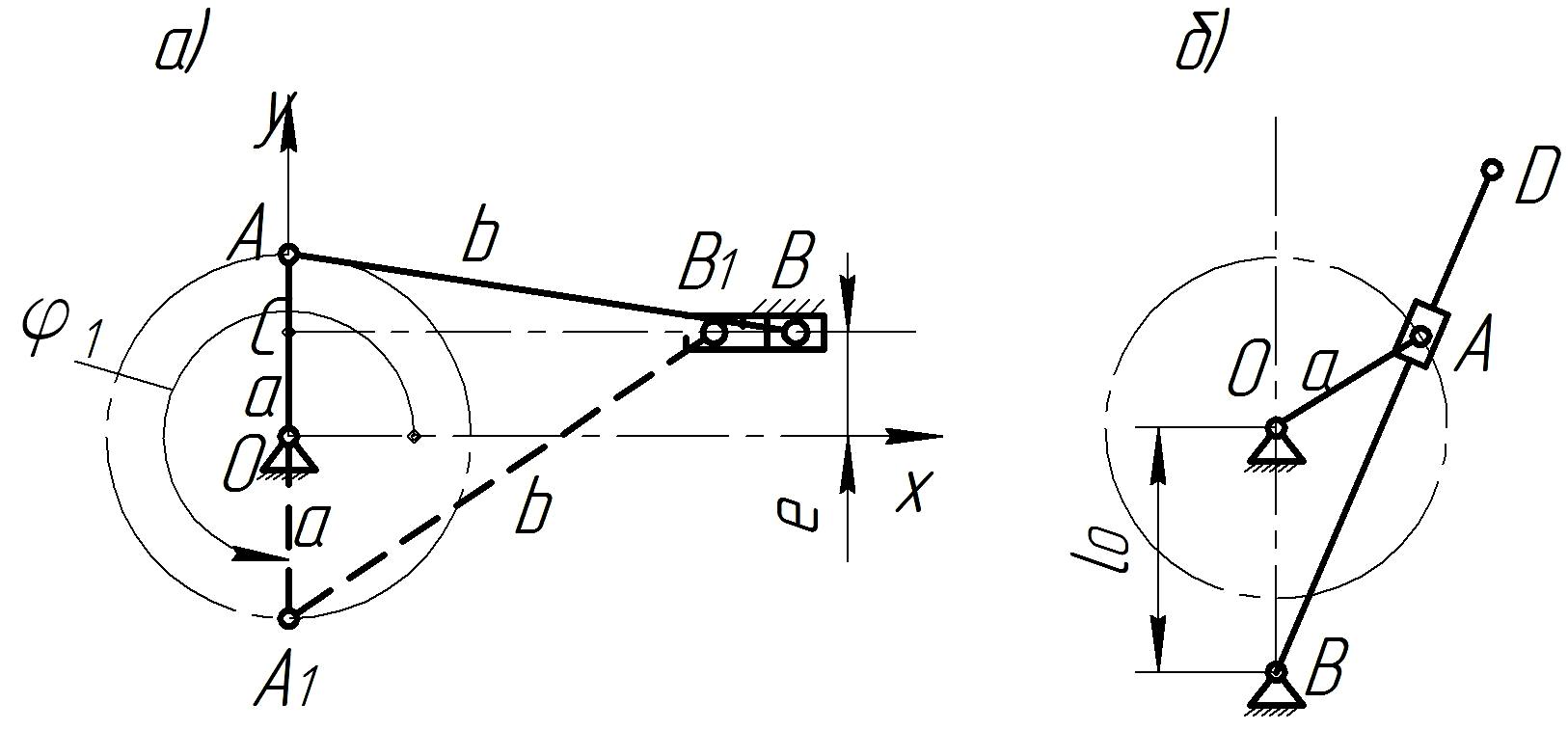
2.
Определим условие существования
кривошипа для внеосного кривошипно-ползунного
(рис.7.2,![]() )
и кулисного (рис.7.2,
)
и кулисного (рис.7.2,![]() )
механизмов.
)
механизмов.
Из
Из
Из
условия (7.4) получим
При
|
Рис.7.2, . 1. звено ОА –всегда кривошип;
2.
при
коромыслом;
3. при
|

Поэтому при постоянной скорости вращения кривошипа время перехода из одного крайнего положения в другое оказывается различным. Соответственно различной оказывается и средняя угловая скорость коромысла.