

36.Эвольвентные профили зубьев колёс. Эвольвента и её уравнение (Билет №37).
Любой паре центроид Ц1 и Ц2 соответствует множество сопряжённых профилей - , обеспечивающих заданное передаточное отношение . Конструктор выбирает эти профили исходя из:
— технологии изготовления профилей: метода изготовления, станочного оборудования, режущего инструмента и т.д.;
— работоспособности передачи: долговечности и надёжности, нагрузочной (несущей) способности, КПД и т.п.;
— чувствительности передачи к погрешностям профилей - , перекосу осей , колёс и т.д.
При передаточном отношении в машиностроении, приборостроении наиболее часто профили зубьев - выполняют по эвольвентам окружностей. Эвольвентное зацепление было предложено Л. Эйлером в 1760 году. Оно имеет ряд преимуществ по сравнению с другими видами зацеплений:
1. Допускает изменение межосевого расстояния , сохраняя .
2. Обладает хорошими эксплуатационными качествами: надёжно и долговечно, КПД до 99% и др.
3. Технологично, т.е. изготовление эвольвентных профилей и инструмент для их нарезания достаточно просты.
37.Основные элементы и размеры зубьев колёс. ( Билет 42) Эвольвента и её уравнение.
Эвольвента окружности – кривая, центры кривизны которой лежат на основной окружности колеса (эволюте).
Производящая прямая n-n перекатывается без скольжения по основной окружности « » радиуса (рис. 9.3).
Точки прямой, например точка М, опишут эвольвенты Э. Проводим касательную t-t к эвольвенте в точке М. Эта касательная перпендикулярна к n-n, так как NM – радиус кривизны эвольвенты в точке М. Параметры эвольвенты:
– угол профиля; – полярный (эвольвентный) угол; – полярный радиус-вектор.
Рис. 9.3.
Из условия получения эвольвенты имеем . Находим эти величины:
— из ONM ; — .
Тогда , откуда
– эвольвентная функция.
Полярный радиус-вектор .
Таким образом, уравнения эвольвенты в параметрической форме имеют вид:
,
. (9.3)
Свойства эвольвенты:
1. Нормаль в любой точке эвольвенты касательна к основной окружности.
2. В текущей точке радиус кривизны эвольвенты равен отрезку и он увеличивается с удалением точки от основной окружности «b».
3. В пределе при эвольвента преобразуется в прямую линию.
38.Определение начального радиуса r0 кулачка для механизмов с коромысловым толкателем.
Задачей
синтеза в данном случае является
определение минимального начального
радиуса
![]() кулачка и расстояния
кулачка и расстояния
![]() между осями вращения кулачка и толкателя,
при которых угол передачи движения во
всех положениях кулачка и толкателя
будет составлять
между осями вращения кулачка и толкателя,
при которых угол передачи движения во
всех положениях кулачка и толкателя
будет составлять
![]() .
Диаграмму аналога скорости
в выбранном масштабе
строят для перемещения центра «B»
ролика толкателя на дуге ab
(рис.16.2) в последовательности:
.
Диаграмму аналога скорости
в выбранном масштабе
строят для перемещения центра «B»
ролика толкателя на дуге ab
(рис.16.2) в последовательности:
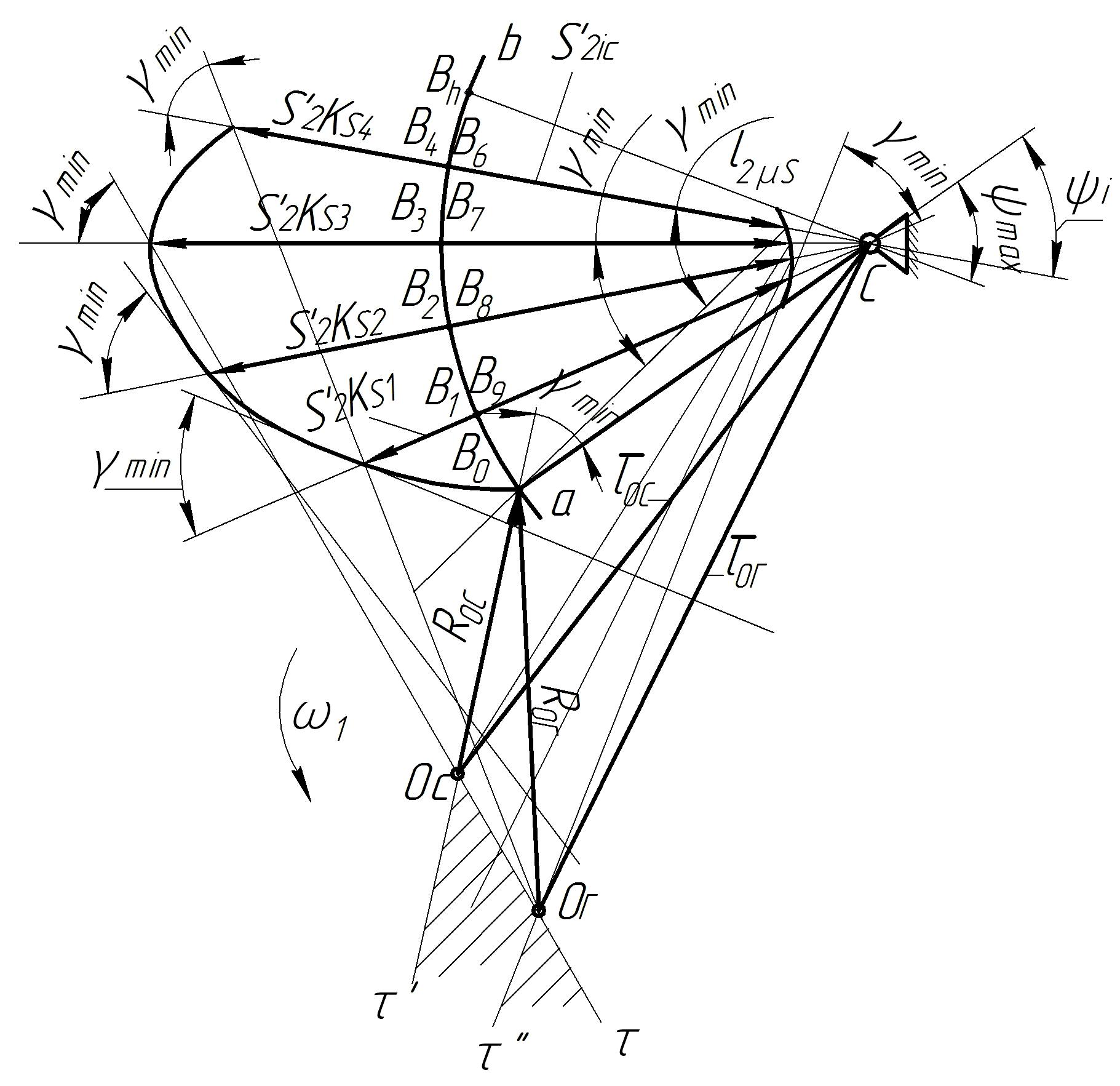
1.
Взяв точку С
как ось вращения толкателя строят его
крайние положения, отстоящие друг от
друга на заданный угол поворота
:
нижнее
![]() и верхнее
и верхнее
![]() .
.
2.
Для принятого закона перемещения
толкателя
рассчитывают на фазе удаления углы его
поворота
![]() от положения
,
соответствующие выбранному ряду значений
относительного угла поворота кулачка
от положения
,
соответствующие выбранному ряду значений
относительного угла поворота кулачка
![]() :
:
![]() ,
,
![]() …
Используя углы
,
строят положения толкателя
…
Используя углы
,
строят положения толкателя
![]() .
.
3.
Для значений относительного угла
![]() рассчитывают аналоги скоростей
рассчитывают аналоги скоростей
![]() ролика толкателя и наносят их на диаграмму
в масштабе
ролика толкателя и наносят их на диаграмму
в масштабе
![]() в виде векторов
в виде векторов
![]() ,
,
![]() ,..
,..![]() откладывая их от точек
откладывая их от точек
![]() .
.
4.
Через концы векторов
![]() под углом
под углом
![]() проводят лучи. Через точку
также проводят луч под углом
.
Пересечение этих лучей даёт острый угол
проводят лучи. Через точку
также проводят луч под углом
.
Пересечение этих лучей даёт острый угол
![]() (заштрихован) как геометрическое место
точек возможного расположения оси
вращения кулачка.
(заштрихован) как геометрическое место
точек возможного расположения оси
вращения кулачка.
5.
Точке
![]() соответствует начальный радиус кулачка
соответствует начальный радиус кулачка
![]() и
межосевое расстояние
и
межосевое расстояние
![]() при силовом
замыкании механизма.
при силовом
замыкании механизма.
6.
При геометрическом замыкании механизма
выполняют дополнительные
построения для фазы сближения
![]() толкателя. Для этого рассчитывают углы
толкателя. Для этого рассчитывают углы
![]() поворота толкателя, соответствующие
ряду значений относительного угла
поворота кулачка на этой фазе
поворота толкателя, соответствующие
ряду значений относительного угла
поворота кулачка на этой фазе
![]() .
Используя рассчитанные углы поворота
и откладывая их от верхнего положения
,
строят положения толкателя
.
Используя рассчитанные углы поворота
и откладывая их от верхнего положения
,
строят положения толкателя
![]() .
На эти положения наносят в масштабе
.
На эти положения наносят в масштабе
![]() рассчитанные для фазы
рассчитанные для фазы
![]() длины векторов-аналогов скорости
длины векторов-аналогов скорости
![]() толкателя для фазы сближения. Точке
толкателя для фазы сближения. Точке
![]() на рис.16.2 соответствует начальный радиус
кулачка
на рис.16.2 соответствует начальный радиус
кулачка
![]() и межосевое расстояние
и межосевое расстояние
![]() .
.