

Вопрос № 1 Система отсчёта. Траектория, путь, перемещение. Средняя и мгновенная скорости. Вектор скорости, модуль вектора скорости. Вычисление пути.
Приступая к изучению движения какого-либо тела, нужно указать, по отношению к какому телу мы рассматриваем движение данного тела. Для измерения времени необходимо иметь часы. Роль часов может выполнять любое устройство, совершающее многократно один и тот же процесс.
Множество неподвижных относительно друг друга тел, по отношению к которым рассматривается движение, и отсчитывающих время часов образует систему отсчета.
Совокупность тел, выделенная для рассмотрения, называется механической системой.
Тело, размерами которого в условиях данной задачи можно пренебречь, называется материальной точкой.
Материальная точка при своем движении описывает некоторую линию - траекторию. В зависимости от формы траектории различают прямолинейное движение, движение по окружности, криволинейное движение и т. д.
Расстояние между начальным и конечным положением частицы, отсчитанное вдоль траектории, называется путем, пройденным частицей. Обозначается буквой s.
Прямолинейный отрезок, соединяющий начальное и конечное положение частицы, называется её перемещением.
В обыденной жизни под скоростью понимают путь, проходимый частицей за единицу времени. Если за равные, сколь угодно малые промежутки времени частица проходит одинаковые пути, движение частицы называют равномерным.
В физике под скоростью понимают векторную величину, характеризующую не только быстроту перемещения частицы по траектории, но и направление, в котором движется эта частица в каждый момент времени.
Радиус-вектор точки это вектор, проведенный из начала координат в данную точку. Его проекции на координатные оси равны координатам точки: rх =х, rу=у, rz = z.
Среднее значение скорости за время Δt это отношение Δ /Δt.
Если
брать все меньшие промежутки времени
Δt,
то это отношение в пределе даст скорость
в момент времени
t:

Если
брать отрезки пути Δs
и перемещения, соответствующие все
меньшим промежуткам времени Δt,
то их различие будет убывать и их
отношение в пределе станет равным
единице
Модуль
скорости
равен производной пути по времени. При
равномерном движении модуль скорости
остается неизменным, а направление
вектора изменяется произвольным
образом. Вектор скорости, можно представить
в виде

Чтобы
вычислить путь,
проходимый частицей с момента времени
t1
до момента t2,
нужно проинтегрировать формулу для
модуля скорости

Пройденный путь можно представить как площадь фигуры, ограниченной кривой u(t), осью t и прямыми t = t1 и t = t2.
Среднее значение модуля скорости за время от t1 до t2 по определению равно

Вопрос № 2 Ускорение. Нормальная и тангенциальная составляющие ускорения. Связь нормального ускорения с радиусом кривизны и скоростью.
Скорость
частицы может изменяться со временем,
как по модулю, так и по направлению.
Быстрота изменения вектора скорости,
определяется производной вектора по
t.
Обозначается буквой a
и
называется - ускорение.
Введём
орт касательной к траектории τ,
направленный также как и вектор скорости.
Следовательно,
вектор
 можно представить в виде суммы двух
составляющих. Одна из них коллинеарна
с
можно представить в виде суммы двух
составляющих. Одна из них коллинеарна
с
 , т. е. направлена по касательной к
траектории, и поэтому обозначается at
и называется тангенциальным
ускорением
, т. е. направлена по касательной к
траектории, и поэтому обозначается at
и называется тангенциальным
ускорением
Если
 > 0 (скорость увеличивается), вектор
> 0 (скорость увеличивается), вектор
 направлен в ту же сторону, что и
направлен в ту же сторону, что и
 Если
< 0 (скорость со временем уменьшается),
векторы
и
направлены в противоположные стороны.
При равномерном движении ускорение
равно 0 и, следовательно, тангенциального
ускорения нет.
Если
< 0 (скорость со временем уменьшается),
векторы
и
направлены в противоположные стороны.
При равномерном движении ускорение
равно 0 и, следовательно, тангенциального
ускорения нет.
Нормальное
ускорение
-
 -
центростремительное ускорение.
-
центростремительное ускорение.

Всякий бесконечно малый участок траектории FABG в окрестностях точки А можно рассматривать как дугу окружности О радиусом R. Его называют радиусом кривизны траектории в точке А, а центр O такой окружности — центром кривизны.

При

 и
β
=π/2+Δα/2
®π/2.
Следовательно, вектор нормален к вектору
скорости и направлен к центру O
кривизны траектории. Поэтому его называют
нормальным (центростремительным)
ускорением. Итак, вектор ускорения при
движении частицы по плоской кривой
определяется следующим выражением:
и
β
=π/2+Δα/2
®π/2.
Следовательно, вектор нормален к вектору
скорости и направлен к центру O
кривизны траектории. Поэтому его называют
нормальным (центростремительным)
ускорением. Итак, вектор ускорения при
движении частицы по плоской кривой
определяется следующим выражением:
Вопрос № 3
Вращательное движение. Угловая скорость, период обращения, угловое ускорение. Связь векторов линейной и угловой скорости. Нормальное и тангенциальное ускорение – связь с радиусом, угловой скоростью и угловым ускорением.
При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения
Поворот тела на некоторый угол φ можно задать в виде отрезка, длина которого равна φ, а направление совпадает с осью, вокруг которой производится поворот. Для того чтобы указать, в какую сторону совершается поворот вокруг данной оси, связывают направления поворота и изображающего его отрезка.
Правило правого винта: направление отрезка должно быть таким, чтобы, глядя вдоль него, мы видели поворот совершающимся по часовой стрелке (вращая головку правого винта по часовой стрелке, мы вызовем его перемещение от себя).
Угловой
скоростью
тела называется векторная величина,
модуль которой определяется формулой
 .
Угловая скорость ω
направлена вдоль оси, вокруг которой
вращается тело, в сторону, определяемую
правилом правого винта. Вращение с
постоянной угловой скоростью называется
равномерным.
.
Угловая скорость ω
направлена вдоль оси, вокруг которой
вращается тело, в сторону, определяемую
правилом правого винта. Вращение с
постоянной угловой скоростью называется
равномерным.
Изменение
вектора угловой скорости со временем
характеризуется величиной которую
называют угловым
ускорением.
Если ось вращение неподвижна, то: если w возрастает, то E и w сонаправлены, если w убывает, то E и w направлены в противоположные стороны.
О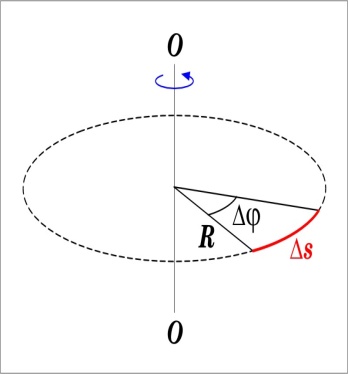 тдельные
точки вращающегося тела имеют различные
линейные скорости. Скорость каждой из
точек изменяет свое направление. Модуль
скорости определяется скоростью
вращения тела и расстоянием R
рассматриваемой точки от оси вращения.
тдельные
точки вращающегося тела имеют различные
линейные скорости. Скорость каждой из
точек изменяет свое направление. Модуль
скорости определяется скоростью
вращения тела и расстоянием R
рассматриваемой точки от оси вращения.
Пусть за малый промежуток времени тело повернулось
на угол Δφ. Точка, находящаяся на расстоянии R от оси,
проходит при этом путь Δs = RΔφ. Линейная скорость точки


Из
рисунка видно, что векторное произведение
 совпадает
по направлению с вектором скорости и
имеет модуль, равный ωrsinα=ωR.
совпадает
по направлению с вектором скорости и
имеет модуль, равный ωrsinα=ωR.

Модуль
нормального ускорения точек вращающегося
тела равен
 = υ2/R
= ω2R
= υ2/R
= ω2R 
Предположим,
что ось вращения тела не поворачивается
в пространстве. Модуль тангенциального
ускорения равен |dυ/dt|.
Учтем, что расстояние точки тела от оси
вращения R
= const, тогда
