

Глава 5
Метод последовательного исключения Гаусса
5.1. Левообратимые бинарные операции
Пусть E =< E, ⊥> - алгебра с носителем E и семейством левообратимых бинарных операций ⊥ на E.
Определение. Бинарная на E операция ⊥ называется левообратимой, если уравнение
x ⊥ a = b
имеет решение x ∈ E, и притом единственное ∀ a, b ∈ E.
Согласно определению, левообратимая операция ⊥ имеет левообратимую обратную операцию
x = b a
такую, что выполнены тождества
(5.1)
(5.2)
(b ⊥ a) a = b
(b a) ⊥ a = b
∀a, b ∈ E
(5.3)
5.2. Двоякое понимание условия разрешимости
Условия существования и единственности уравнения (5.1) в реализованном аспекте могут пониматься двояко (в
узком и широком смыслах):
· как явная (формальная) разрешимость уравнения (5.1) относительно переменных
· как алгоритмическая (численная) разрешимость уравнения (5.1), то есть как существование алгоритма, который
по значениям a и b вычисляет значение переменной x, удовлетворяющее уравнению (5.1)
Очевидно, оба эти толкования разрешимости содержатся, как частные случаи, в более общем функциональном
толковании, то есть как функция y = x ⊥ a, биективно отображающая E на E для каждого значения "параметра"a ∈
E.
5.3. Пример левообратимой бинарной операции
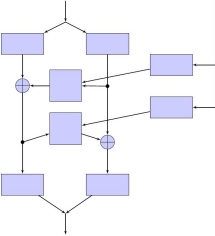
Две последовательных цикловых (раундовых) фукнции шифра Фейстеля описываются следующим уравнением:
y1 = x1 ⊥ Φ(x2, k1)
y2 = x2 ⊥ Φ(x1 ⊥ Φ(x2, k1), k2)
или
y1 = x1 ⊥ Φ(x2, k1)
y2 = x2 ⊥ Φ(y1, k2)
Последнее преобразование можно понимать как новую левообратимую операцию ⊥ над E × E:
(y1, y2) = (x1, x2)⊥(k1, k2)
(x1, x2) = (y1, y2) ¯ (k1, k2)
или
y = xk
x = yk
(5.4)
(5.5)
(5.6)
(5.7)
(5.8)
(5.9)
(5.10)
(5.11)
:
5. Метод последовательного исключения Гаусса
5.4. Пример левообратимой бинарной операции
X1
X
X2
K
K1
Φ
K2
Φ
Y1
Y
Y2
(y1, y2) = (x1, x2)(k1, k2)
(x1, x2) = (y1, y2)(k1, k2)
5.5. Последовательное исключение переменных
Определение. Независимая переменная системы уравнений
(5.12)
(5.13)
F :
yi = fi(x1, x2, . . . , xn)
1 ≤ i ≤ n
(5.14)
называется ведущей относительно остальных переменных, если:
· во-первых, система () имеет в своем составе хотя бы одно уравнение, явно разрешимое относительно указанной
перменной
· во-вторых, редуцированная система, полученная исключением указанной переменной из остальных уравнений
системы (), вновь имеет в своем составе хотя бы одно уравнение, явно разрешимое относительно некоторой из
своих независимых переменных
Утверждение. Система F допускает последовательное исключение переменных тогда и только тогда, когда она
характеризуется некоторым порядком ее независимых переменных, в котором каждая переменная оказывается веду-
щей относительно всех последующих.
Определение. Систему F будем называть гауссовой, если она допускает последовательное исключение перемен-
ных. Гауссову систему F , допускающую последовательное исключение переменных в порядке x1, x2, . . . , xn будем
называть номинальной.
Утверждение. Всякая гауссова система элементарными преобразованиями может быть приведена к номинальной
форме.
Утверждение. Номинальная система F , отображающая E1 × E2 × . . . × En на себя, процедурой последовательного
исключения переменных преобразуется к равносильной системе G:
G :
yi = gi(y1, . . . , yi−1, xi, xi+1, . . . , xn)
1 ≤ i ≤ n
(5.15)
где каждое i-е уравнение явно разрешимо относительно i-й переменной xi, при этом рекурсивно порождается отобра-
жение
18
5.6. Последовательное исключение переменных
G−1 :
−1
yi = gi (y1, . . . , yi−1, xi, xi+1, . . . , xn)
1 ≤ i ≤ n
(5.16)
где каждое i-е уравнение явно разрешимо относительно i-й переменной и система G−1 является обращением системы
G.
5.6. Последовательное исключение переменных
В результате последовательного исключения переменных из номинальной системы F синхронно (пошагово) гене-
рируются две системы G и G−1:
G :
y1 = g1(x1, x2, x3, . . . , xn)
y2 = g2(x1, x2, x3, . . . , xn)
y = g3(x1, x2, x3, . . . , xn)
...
yn = gn(x1, x2, x3, . . . , xn)
(5.17)
G :
−1
x1 = gn (y1, y2, y3, . . . , yn)
x2 = gn−1(y1, y2, y3, . . . , yn)
−1
x3 = gn−2(y1, y2, y3, . . . , yn) .
(5.18)
...
xn = g−1(y1, y2, y3, . . . , yn)
Система G равнозначна исходной системе F . При этом каждое i-е уравнение системы G явно разрешимо относи-
тельно i-й переменной, благодаря чему возникает вторая система G−1.
Определение. Системы вида G и G−1, в которых каждое i-е уравнение является биективной функцией по i-й
переменной при любых допустимых значениях других переменных, будем называть g-треугольными (соответственно
номинальной и кономинальной) порядка n × n.
5.7. Выводы по методу последовательного исключения переменных
1. Любая гауссова система F , то есть система, допускающая последовательное исключение переменных, переста-
новкой уравнений и соответствующим преобозначением переменных, может быть преобразована к номинальной
форме.
2. Любая номинальная гауссова система F равнозначна номинальной g-треугольной системе; обращением g-треугольной
номинальной системы служит кономинальная g-треугольная система.
3. Понятие g-треугольных систем не требует (хотя и не исключает) выполнения условий явной разрешимости их
относительно соответствующих независимых переменных. Тем самым понятие g-треугольных систем обобщает
понятие гауссовых систем.
5.8. Метод Гаусса-Зейделя
Дана система F . Требуется найти неподвижную точку отображения F , то есть решить систему уравнений:
x1 = f1(x1, x2, . . . , xn)
x2 = f2(x1, x2, . . . , xn)
. . .
xn = fn(x1, x2, . . . , xn)
(5.19)
В вычислительной математике широко распространены два метода итераций - метод простой итерации и метод
Гаусса-Зейделя.
· Решение системы методом простой итерации. Задается начальное приближение (x0, x0, . . . , xn). Последующие
приближения строятся согласно итерациям:
= fi(xk , xk , . . . , xn)
1 ≤ i ≤ n
(5.20)
k = 0, 1, 2, . . .
· Решение системы методом Гаусса-Зейделя. При тех же начальных данных последующие приближения строятся
согласно итерациям:
19
3
−1
01 2
(k+1)
xi
k1 2
5. Метод последовательного исключения Гаусса
(k+1) (k+1)
xi = fi(x1
1 ≤ i ≤ n
(k+1)
, . . . , xi−1 , xk , xi+1, . . . , xn)
(5.21)
k = 0, 1, 2, . . .
Метод итераций Гаусса-Зейделя алгоритмически равнозначен методу простой итерации:
x1 = f1(x1, x2, . . . , xn)
F : x2 = f2(x1, x2, . . . , xn)
. . .
xn = fn(x1, x2, . . . , xn)
(5.22)
Определение. Пусть задана последовательность g-треугольных систем G1, G2, . . . , Gt, отображающих E1 × E2 ×
. . . × En на себя. Композицию этих отображений
GZi := Gt ◦ Gt−1 ◦ . . . ◦ G2 ◦ G1
(5.23)
будем называть отображением Гаусса-Зейделя ранга t, t ∈ N
Если Gi = G ∀t, то GZi = Gt, и, трактуя параметр t как дискретное время, последовательность x0, x1, . . . , xi, . . .,
где xt = Gt(x0), обычно понимается как траектория системы G.
Вывод: GZ-отображения, построенные на базе g-треугольных систем расширяют класс обратимых отображений
на E1 × E2 × . . . × En.
5.9. G-треугольные системы как левообратимые бинарные операци на
декартовом произведении множеств
Пусть задано произвольное отображение F множества E1 × E2 × . . . × En на себя:
F :
yi = fi(x1, x2, . . . , xn)
1 ≤ i ≤ n
(5.24)
и пусть на каждом множестве Ei(1 ≤ i ≤ n) определена левообратимая бинарная операция ⊥i, пусть, далее, (a1, a2, . . . , an)
- произвольный элемент декартового произведения E1 × E2 × . . . × En. Образуем новую систему:
G :
yi = xi ⊥i fi(y1, . . . , yi−1, ai, xi+1, . . . , xn)
1 ≤ i ≤ n
(5.25)
Очевидно, эта система g-треугольна. Синтезированную на базе произвольной системы F g-треугольную систему G
можно
рассматривать на E1
× E2
× . . . × En
как левообратимую бинарную операцию
⊥F
в базисе F :
¯
= x⊥F
a
(5.26)
Отметим, что при E1 = E2 = . . . = En = E, пересталяя уравнения системы F, а также используя бинарные
операции {⊥i}i=1 в различных порядках, можно получить (n!)3, вообще говоря, различных g-треугольных систем
(бинарных операций на E n).
5.10. Применение G-треугольных систем в криптографии
G-треугольные системы обобщают сети Фейстеля
Форма 1 сбалансированной системы
...
z1 = y1 ⊥1 ϕ1(t1, . . . , tn) = x1 ⊥2 f1(k1, x2, . . . , xn)
z2 = y2 ⊥1 ϕ2(y1, t2, . . . , tn) = x2 ⊥2 f2(y1, k2, x3, . . . , xn)
z3 = y3 ⊥1 ϕ3(y1, y2, t3, . . . , tn) = x3 ⊥2 f3(y1, y2, k3, x4, . . . , xn)
(5.27)
(5.30)
zn = yn ⊥1 ϕn(y1, y2, . . . , yn−1, tn) = xn ⊥2 fn(k1, x2, . . . , xn)
Сбалансированная система биективно отображает E n на E n. Здесь: (x1, x2, . . . , xn) - входные переменные; (z1, z2, . . . , zn)
- выходные переменные; (t1, t2, . . . , tn) - свободные переменные (т.е. параметры).
Алгоритм прямого преобразования (первая форма)
Вход
1 шаг
(x1, x2, . . . , xn)
(t1, t2, . . . , tn)
Выход (z1, z2, . . . , zn)
20
ki k
˜
y ¯ ¯
n
(5.28)
(5.29)
(5.31)
5.10. Применение G-треугольных систем в криптографии
z1 = x1 ⊥2 f1(k1, x2, . . . , xn){на выход}
y1 = z1 1ϕ1(t1, t2, . . . , tn){промежуточное состояние}
2 шаг
z2 = x2 ⊥2 f2(y1, k2, x3, . . . , xn){на выход}
y2 = z2 1ϕ2(y1, t2, . . . , tn){промежуточное состояние}
...
n-й шаг
zn = xn ⊥2 fn(y1, . . . , yn−1, kn){на выход
Алгоритм обратного преобразования (первая форма)
Вход
(z1, z2, . . . , zn)
(t1, t2, . . . , tn)
Выход (x1, x2, . . . , xn)
1 этап
Вход: (z1, z2, . . . , zn); (t1, t2, . . . , tn) - параметр
Выход: (y1, y2, . . . , yn−1)
1 шаг y1 = z1 1ϕ1(t1, t2, . . . , tn)
2 шаг y2 = z2 2ϕ1(y1, t2, . . . , tn)
...
n-й шаг yn = zn 1ϕn(y1, . . . , yn−1, tn)
2 этап
Вход: (z1, z2, . . . , zn); (y1, y2, . . . , yn)
Выход: (x1, x2, . . . , xn)
1 шаг xn = zn 2fn(y1, y2, . . . , yn−1, kn) { на выход }
2 шаг xn−1 = zn−1 2fn−1(y1, y2, . . . , yn−2, kn−1, xn) { на выход }
...
(n-1)-й шаг x2 = z2 2f2(y1, k2, x3, . . . , xn) { на выход }
n-й шаг x1 = z1 2f1(k1, x2, . . . , xn) { на выход }
Все входные состояния не хранятся после декодирования.
Форма 2 сбалансированной системы
z1 = y1 ⊥1 ϕ1(t1, . . . , tn) = x1 ⊥2 f1(k1, x2, . . . , xn)
z2 = y2 ⊥1 ϕ2(y1, t2, . . . , tn) = x2 ⊥2 f2(y1, k2, x3, . . . , xn)
z3 = y3 ⊥1 ϕ3(y1, y2, t3, . . . , tn) = x3 ⊥2 f3(y1, y2, k3, x4, . . . , xn)
...
zn = yn ⊥1 ϕn(y1, y2, . . . , yn−1, tn) = xn ⊥2 fn(k1, x2, . . . , xn)
Здесь те же входные, выходные и свободные переменные, что и в форме 1.
Алгоритм прямого преобразования (вторая форма)
(5.32)
(5.35)
Вход
(x1, x2, . . . , xn)
(t1, t2, . . . , tn)
Выход (z1, z2, . . . , zn)
1 шаг
z1 = x1 ⊥2 f1(k1, x2, . . . , xn){на выход}
y1 = z1 1ϕ1(t1, t2, . . . , tn){промежуточное состояние}
2 шаг
z2 = x2 ⊥2 f2(y1, k2, x3, . . . , xn){на выход}
y2 = z2 1ϕ2(y1, t2, . . . , tn){промежуточное состояние}
...
n-й шаг
zn = x2 ⊥2 fn(y1, . . . , yn−1, kn){на выход
Алгоритм обратного преобразования (вторая форма)
Вход
(z1, z2, . . . , zn)
(t1, t2, . . . , tn)
Выход (x1, x2, . . . , xn)
1 этап
Вход: (z1, z2, . . . , zn); (t1, t2, . . . , tn) - параметр
Выход: (y1, y2, . . . , yn−1)
1 шаг y1 = z1 1ϕ1(t1, t2, . . . , tn)
2 шаг y2 = z2 2ϕ1(y1, t2, . . . , tn)
...
n-й шаг yn = zn 1ϕn(y1, . . . , yn−1, tn)
2 этап
Вход: (z1, z2, . . . , zn); (y1, y2, . . . , yn)
Выход: (x1, x2, . . . , xn)
21
(5.33)
(5.34)
(5.36)
5. Метод последовательного исключения Гаусса
1 шаг xn = zn 2fn(y1, y2, . . . , yn−1, kn) { на выход }
2 шаг xn−1 = zn−1 2fn−1(y1, y2, . . . , yn−2, kn−1, xn) { на выход }
...
(n-1)-й шаг x2 = z2 2f2(y1, k2, x3, . . . , xn) { на выход }
n-й шаг x1 = z1 2f1(k1, x2, . . . , xn) { на выход }
22