

Рычаг Жуковского
Этот метод позволяет определить величину уравновешивающей силы или момента без определения реакций в кинематических парах, т.е. без выполнения силового расчета групп Ассура.
1. Строим план скоростей для рабочего положения, повернутый на 90˚;
2. Прикладываем к концам соответствующих векторов внешние силы:
G2’,G3, G4, Fи2’, Fи3, Fи4.
3. Моменты Mu3 и M преобразуем в моменты М’u3 и М:
![]()
![]()
4.Cоставляем уравнение равновесия:
![]()
5.Плечи сил находим из плана:
![]()
![]()
![]()
![]()
![]()
6. Момент на 2-ом колесе равен:
![]()
![]()
7. Уравновешивающий момент на 1-ом колесе равен:
![]()
9.Погрешность

Расчет КПД механизма
Радиусы цапф для всех вращательных пар механизма:
Моменты трения во вращательных парах:
Мощность трения в кинематических парах:
Полная мощность трения:
![]()
Полезная мощность:
![]()
КПД механизма:
![]()
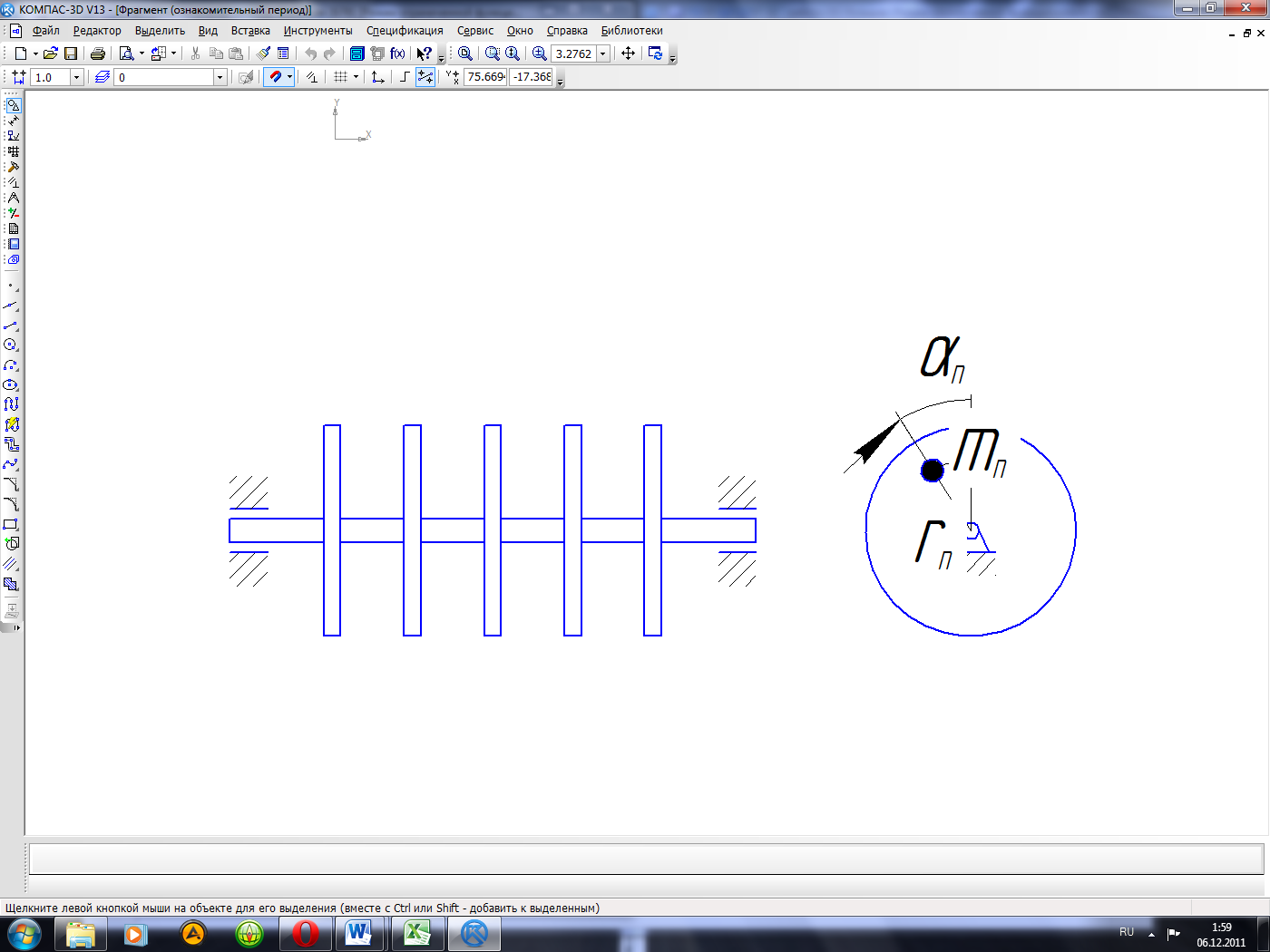
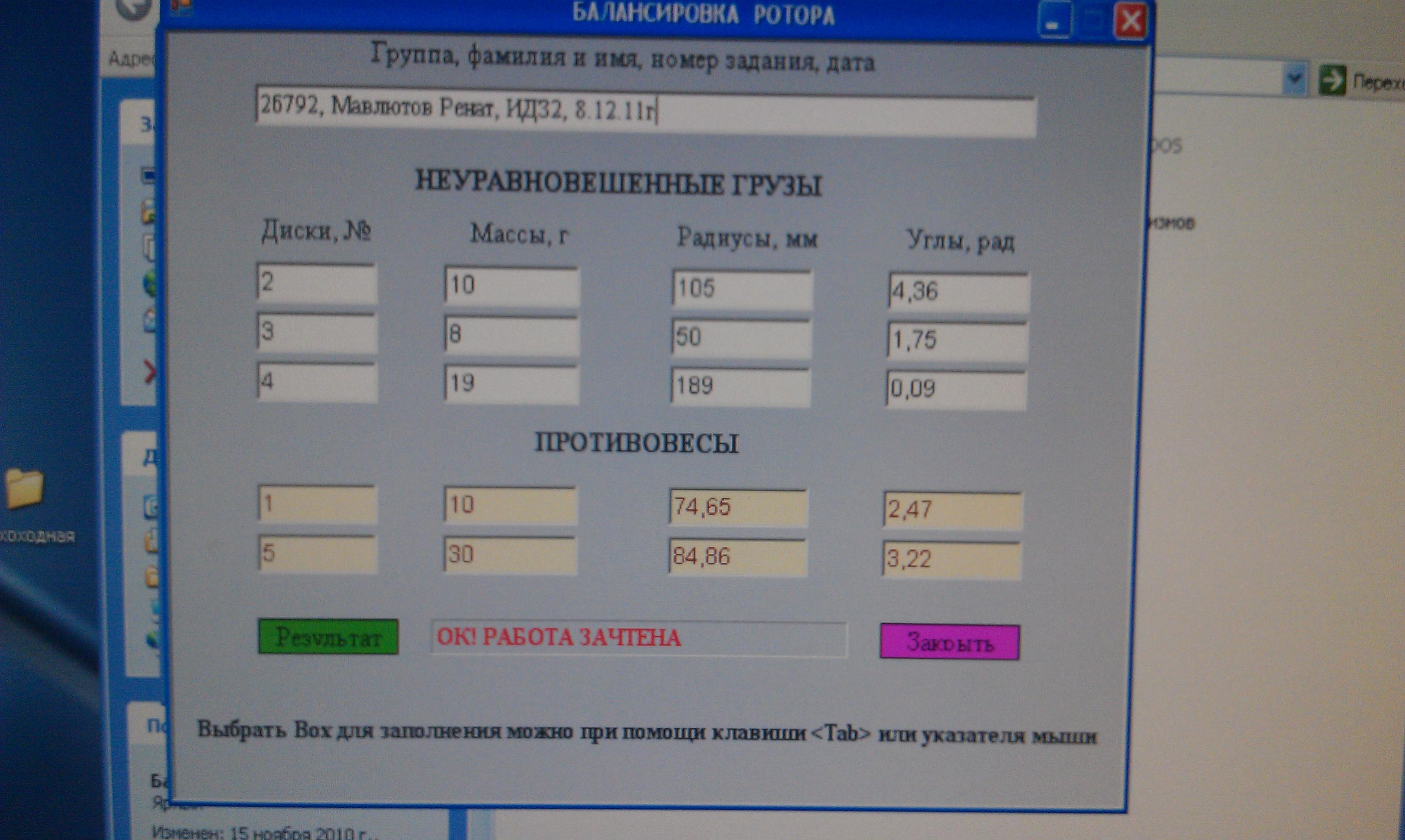
Балансировка ротора Вариант 6.8.
На валу неподвижно на одинаковом расстоянии друг от друга установлены пять дисков. Диаметры дисков равны D. На трех дисках закреплены неуравновешенные массы mn с координатам центров масс αn и rn, где n – порядковый номер диска. Определить наименьшие корректирующие массы mk , ml и координаты их центров αk, rk, αl, rl, устанавливаемые на двух свободных дисках, для выполнения условия динамической уравновешенности системы.
Исходные данные:
|
Диски |
Массы, г |
Радиусы, мм |
Углы, рад. |
|
Неуравновешенные грузы |
|||
|
2 |
10 |
105 |
4,36 |
|
3 |
8 |
50 |
1,75 |
|
4 |
19 |
189 |
0,09 |
Ответ:
|
Диски |
Массы, г |
Радиусы, мм |
Углы, рад. |
|
Противовесы |
|||
|
1 |
10 |
74,65 |
2,47 |
|
5 |
30 |
84,86 |
3,22 |
-
Рассмотрим плоскость XOZ:
Уравнение моментов относительно точки A
![]()
![]()
![]()

У![]() равнение
сил
равнение
сил
![]()
![]()
.
-
Рассмотрим плоскость YOZ:
Уравнение моментов относительно точки A
![]()
![]()
![]()
![]()
Уравнение сил
![]()
![]()
![]()
-
Определение дисбаланса:
-
Расчет углов при противовесах:
-
Подберем массу и радиус для первого и пятого противовесов:
Масса (40 ÷ 120) с интервалом 10 г
Р адиус
(50 ÷
120) мм
адиус
(50 ÷
120) мм
Пусть масса тогда ;
, ;
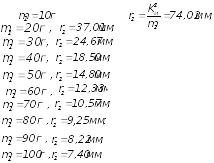
Пусть масса , тогда.
![]()
Кинематический анализ зубчатых механизмов.
Схема №1

Литература
-
Пашков Е.Н. Курс лекций по теории машин и механизмов / от 2.09.2011 до 14.11.2011г.
-
В.Т.Горбенко, М.В.Горбенко. Теория механизмов и машин. Курсовое проектирование: учебное пособие/ Изд. 2-е, испр. и дополн. – Томск: Изд-во Томского политехнического университета, 2007. – 144с., вкладка 4с.