

Содержание
Структурный анализ зубчато-рычажного механизма…………………………………………………………………3
Кинематическое исследование механизма методом планов в рабочем положении…….6
Построение плана скоростей рабочего положения. ……………………...............................................8
Построение плана ускорений………………………………………………………………………………………………………9
Силовой расчет механизма…………………………………………………………………………………………………………………….…11
Определение сил, действующих на звенья механизма…………………………………………………12
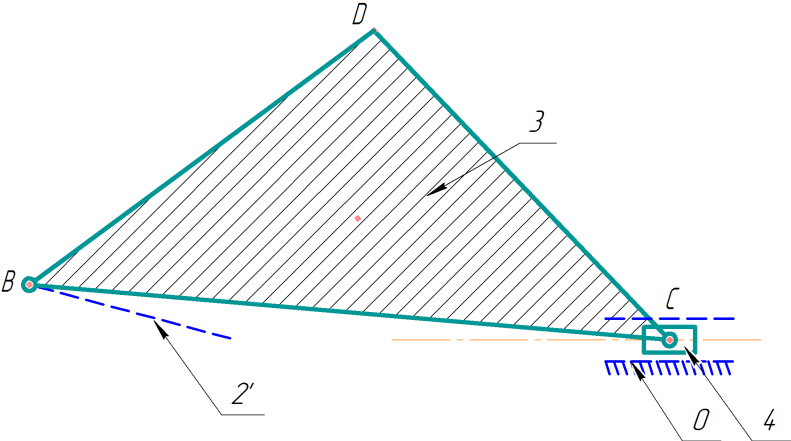
Силовой расчет группы 3-4 [В23-В34-П40]…………………………………………………………………………….13
Силовой расчет группы 2-2’[ВП12-В02]…………………………………………………………………………………..14 Силовой расчет начального механизма В01………………………………………………………………………..16
Рычаг Жуковского…….…………………………………………………………………………………………………………………………………17
Расчет КПД механизма. …………………………………………………………………………………………………………………………..18
Балансировка ротора ……………………………………………………………………………………………………………………………….19
Кинематический анализ зубчатых механизмов.………………………………………….…………………………………23
Литература……………………………………………………………………………………………………………………………………………………25
Структурный анализ зубчато-рычажного механизма
Цель структурного анализа – выявить строение (структуру) механизма.
При этом необходимо:
-
определить число звеньев механизма и назвать каждое из них;
-
определить число кинематических пар и дать характеристику (соединения каких звеньев, вид (вращательная, поступательная), характер соприкосновения звеньев (низшая или высшая кинематическая пара), число степеней свободы(класс));
-
выявить структурные группы (группы Ассура), входящие в состав механизма; привести схемы групп, назвать их, определить класс группы, написать формулу строения;
-
определить степень подвижности механизма(по формуле П.Л.Чебышева);
-
привести формулу строения механизма(в общем и развернутом виде).
Структурный анализ механизма
|
Подвижные звенья |
К |
||||||
|
Схема |
Название |
Схема |
Вид |
Степ. Подв. |
Символ |
Класс пары |
Высш.. или Низш. |
|
|
Шестер-ня-ведущее звено
|
|
Вращ.
|
1 |
В01 |
Р5
|
Низш. |
|
|
Вращ.-поступ.
|
2 |
ВП12 |
Р4
|
Высш. |
||
|
|
Зубчатое колесо-кривошип
|
||||||
|
|
Вращ.
|
1 |
В02 |
Р5
|
Низш. |
||
|
|
Шатун |
|
Вращ..
|
1 |
В2’3 |
Р5
|
Низш. |
|
|
Вращ.
|
1 |
В34 |
Р5
|
Низш. |
||
|
|
Ползун |
||||||
|
|
Поступ..
|
1 |
П40 |
Р5
|
Низш. |
||
 инематические
пары
инематические
пары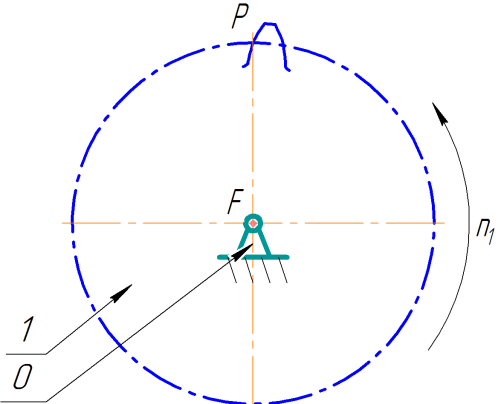




Число подвижных звеньев n=4
Число кинематических пар: всего-6, из них пятого класса Р5 =5, четвертого класса Р4=1
Степень подвижности механизма: W=3·n-2·P5 -P4=12-10-1=1
Примечание: пассивных звеньев и кинематических пар механизм не содержит
-
Структурный состав механизма.
|
Начальный механизм и структурные группы (группы Ассура) |
|||||
|
Схема |
Название, класс, порядок, вид. |
Число звеньев
|
Число кинематических пар |
Формула строения |
|
|
Всего |
Поводковых |
||||
|
|
Начальный вращательный механизм 1 класса |
1 |
1 |
-
|
В01 |
|
|
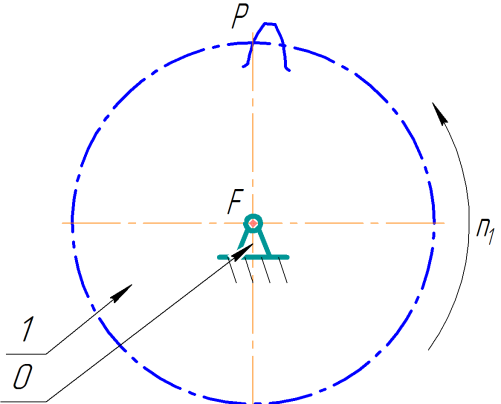
Однозвеньевая двухповодковая группа Ассура с высшей кинематической парой
|
1
|
2 |
2
|
ВП12-В02 |
|
|
Двухзвеньевая двухповодковая группа Ассура 2 класса 2 порядка
|
2
|
3 |
2
|
В23-В34-П40
|
|
Начальный механизм -1. Cтруктурных групп(групп Ассура) -2, соединение групп- последовательное, механизм второго класса. Формула строения: В01 - [ВП12-В02 ] - [В23-В34-П40 ] |
|||||
Кинематическое исследование механизма методом планов в рабочем положении.
Задача кинематического исследования механизма состоит в определение:
- численных значений линейных скоростей всех характерных точек механизма (кинематических пар, центров тяжести) и угловых скоростей всех звеньев для рассматриваемых положений, для чего построить планы скоростей для рабочего положения;
- численных значений линейных ускорений всех характерных точек механизма и угловых ускорений всех звеньев для данных положений, для чего построить планы ускорений для того же положения;
- траекторий некоторых точек звеньев.
Построение плана скоростей рабочего положения.
d1 = m∙z1 = 2 ∙18 = 36 мм = 0,036 м;
d2 = m∙z2 = 2 ∙ 20 = 40 мм = 0,04 м;
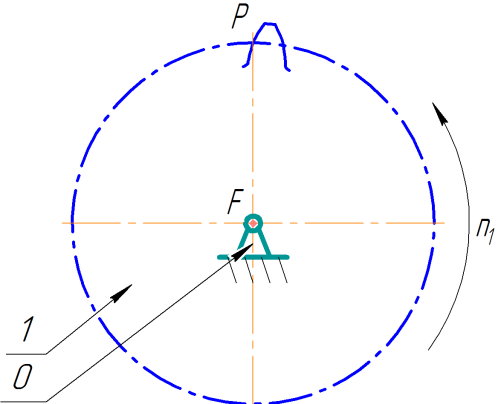
VA =VF = 0
Угловая скорость колеса 1:
ω1
=![]() =
=![]() с -1;
с -1;
Частота вращения колеса 2:
n2
=
n1
∙
z1/z2
=
![]() об./мин;
об./мин;
![]()
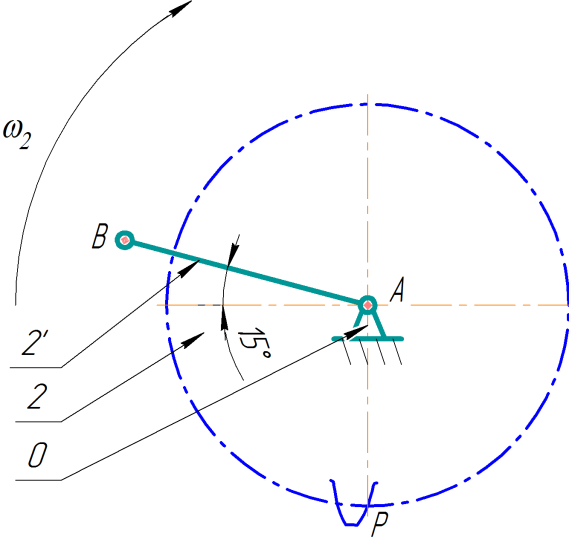
Угловая скорость колеса 2:
ω2
=![]() =
=![]() с -1;
с -1;
Определим линейную скорость точки В звена 2
VВ
=
ω2∙
lAB
=
![]() м/с;
м/с;
Строим точку b на плане скоростей. Для этого задаем масштаб плана скоростей:
μv= 0,005 (м/с)/мм;
Находим длину вектора скорости точки B на плане скоростей:
Pvb = VВ / μv = 0,4712/0,005 = 94,2478 мм;
На плане скоростей из произвольной точки Pv (полюса) проводим линию, перпендикулярную прямой АВ на плане механизма и откладываем отрезок равный Pvb .
Находим скорость точки С . Для этого решаем систему двух векторных уравнений:
![]() ;
;
где – VВ скорость точки В (найдена),
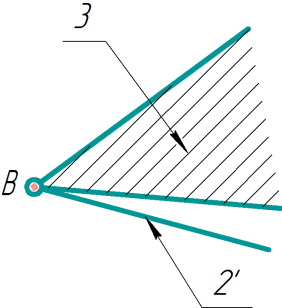
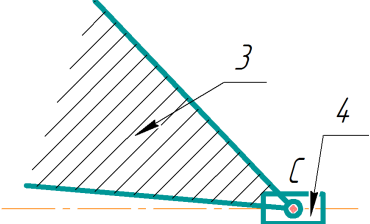
VC – направление вектора скорости нам известно. Вектор направлен вдоль горизонтальной оси.
VCB
![]() CB
–скорость
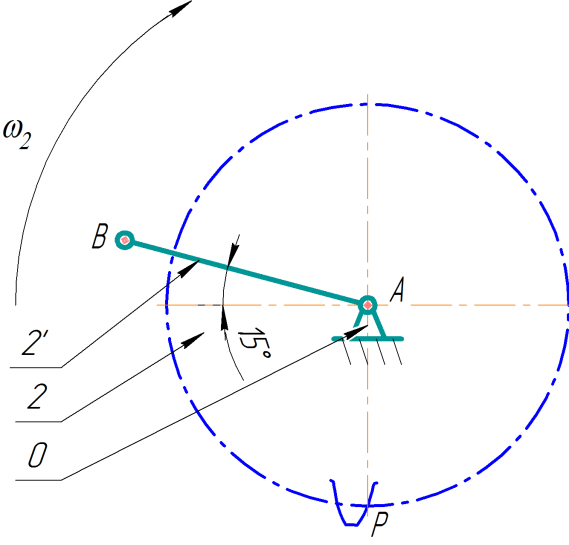
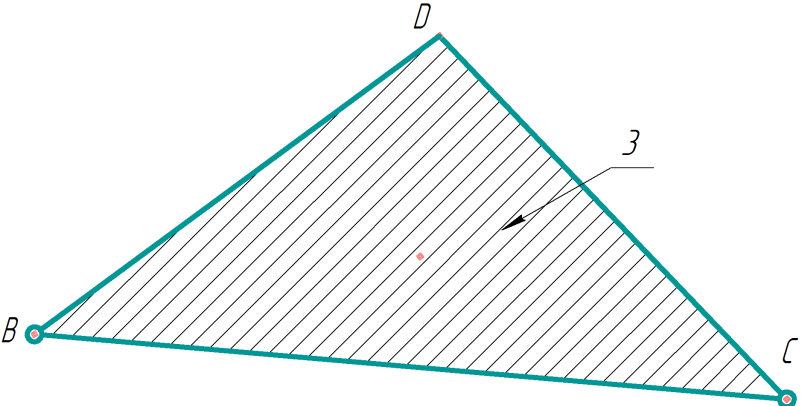
точки С при вращении звена ВDС
вокруг оси шарнира В (направлена
перпендикулярно линии ВС)
CB
–скорость
точки С при вращении звена ВDС
вокруг оси шарнира В (направлена
перпендикулярно линии ВС)
Построение точки с на плане скоростей ведем в следующей последовательности:
Из точки b проводим направление скорости VСВ – линию перпендикулярную линии ВС.
Из полюса проводим вектор VC до пересечения с вектором VCB. Точка пересечения векторов и есть точка с.
Скорость VС точки С равна:
VС = Pvc ∙ μv = 16,5101 ∙ 0,005 = 0,0826 м/с;
Скорость точки D найдем по правилу подобия:
Строим треугольник bdc подобный треугольнику BDC
![]() мм;
мм;
![]() мм;
мм;
VD = Pvd ∙ μv = 73,7514 ∙ 0,005 = 0,3688 м/с;
Угловая скорость 3-его звена:
![]() ω3
=
VBC
/ lBC
=
μv∙
bc/
lBC
=
ω3
=
VBC
/ lBC
=
μv∙
bc/
lBC
=![]() с -1;
с -1;
-
ω2,
с -1
VA =VF, м/с
VВ,
м/с
VС,
м/с
VD,
м/с
ω3,
м/с
20,944
0
0,4712
0,0826
0,3688
6,0918