

1.Интеграция в системе организации воздушного движения
Інтеграція в системі організації повітряного руху
Інтегрована система повинне створюватися на базі існуючої системи, з тим щоб в максимально можливому ступені задовольнити потреби користувачів разом з реалізацією потенційних переваг від застосування нових технологій. Система повинна разраба¬тываться на базі системного підходу, адаптованого до конкретних вимог різних частин регіону за умови, що відмінність в рівні обслужи¬вания не перешкоджатиме збільшенню ин¬тенсивности повітряного руху при забезпеченні його безпеки.
Система ОВД включає наземну і повітря частини, які потрібні для забезпечення безопас¬ного і ефективного руху повітряних судів на усіх етапах польоту. При цьому предусматрива¬ется тісна взаємодія наземної і повітря частин з допомогою чітко установ¬ленних процедур.
Для інтегрованої системи ОВД система зв'язку, навігацію і спостереження повинна задовольняти вимогам глобальної концепції.
В області зв'язку передбачається:
- здійснювати передачу даних і мови по прямих каналах зв'язку "СПУТНИК-ВС", при цьому ВЧ-связь в перехідний період зберігати до тих пір, поки не буде забезпечений супутниковий зв'язок;
- використати дуже високі частоти (ОВЧ) для передачі мови і даних в континентальних і вузлових районах;
- використати лінії передачі даних режиму S ВОРЛ для ОВД в просторі з високою щільністю руху;
- використати мережу авіаційного електрозв'язку для обеспече¬ния обміну цифровими даними в пакетному режимі між пользова¬телями за допомогою різних каналів зв'язку "повітря-земля" і "земля-земля";
В області навігації передбачається:
- поступово впроваджувати засоби зональної навігації в соответ¬ствии з критеріями необхідних навігаційних характеристик;
- використати глобальну супутникову навігаційну систему для навігації ВС, а також для забезпечення неточних заходів на заходів на посадку;
- застосовувати мікрохвильову систему посадки (MLS) і инструменталь¬ную систему посадки (ILS).
В області спостереження передбачається:
- використати режим A/C або режим S ВОРЛ в повітряному просторі з високою щільністю руху;
- використати автоматичне залежне спостереження (АЗН.
2.Контуры управления в системе вд
1. Стабілізація літака відносно центру мас.
2. Управління літаком на заданій траєкторії польоту
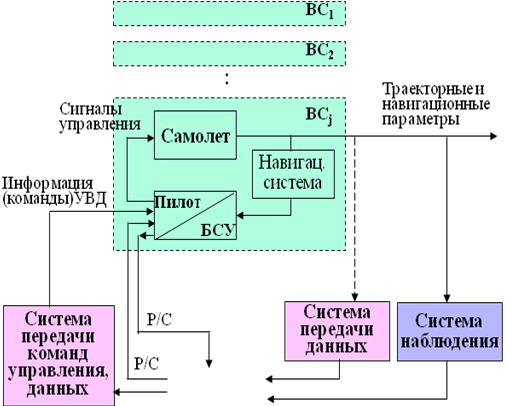 3.
Управління повітряним рухом
3.
Управління повітряним рухом
3.Назначение и цели ас увд, решаемые задачи
Автоматизована система управління повітряним рухом (АС УВС) призначена для автоматизації контролю і УВС у встановлених зонах повітряного простору (ВП).
Мета створення АС УВС - підвищити безпеку і економічність обслуговування повітряного руху (ВД), поліпшити умови роботи диспетчерів за рахунок підвищення інформативності відображення повітряної обстановки (У), автоматизації обробки інформації.
Сучасні АС УВС - це потужна обчислювальна мережа розподілених процесорів, здатних приймати дані від різних джерел, обробляти їх в реальному масштабі часу і надавати необхідні дані користувачам: на робочі місця диспетчерів і на борт повітряного судна (ВС).
Основу АС УВС складає автоматизоване робоче місце диспетчера
4.Задачи автоматизации при управлении воздушным движением
Важливе місце в системі відводиться засобам автоматизації організації потоку в реальному масштабі часу для обробки маси інформаційних даних і виробленні стратегій по потоках. В процесі ухвалення рішень по стратегії потоків передбачається використати інформацію бортових систем управління режимами польоту, які знаходитимуться в режимі автоматичного зв'язку з наземною системою ОВД. Завдання організації повітряного простору полягає в обеспече¬нді максимального використання вільного повітряного простору, що розташовується, у рамках заданої його структури на основі динамічного розподілу за часом, і в окремих випадках в резервуванні повітряного простору для різних категорій користувачів з метою задоволення краткосроч¬ных потреб.
Ефективним способом реалізації вимог, що пред'являються до системи ОВД, є її автомати¬зация.
Автоматизована система управління повітряним рухом - це потужна обчислювальна мережа розподілених процессо¬рів, здатна приймати дані від різних джерел, обробляти їх в реальному масштабі часу і надавати необхідну інформацію користувачам (диспетчерам на робочі місця і системі управління польотом на борту)
5.Место ас увд в Системе Воздушного Движения
Автоматизована система управління повітряним рухом - це потужна обчислювальна мережа розподілених процессо¬рів, здатна приймати дані від різних джерел, обробляти їх в реальному масштабі часу і надавати необхідну інформацію користувачам (диспетчерам на робочі місця і системі управління польотом на борту). (див. Призначення і цілі АС УВС, вирішувані завдання)
Диспетчер управління радіолокації також матиме у своєму розпорядженні автоматизовані засоби для опрацювання рішення, яке він збирається реалізувати
Локаційний дисплей є основним засобом диспетчера. Він безперервно відображає усі дані, постійно необхідні диспетчерові. Додаткові дані виводяться на екран за запитом.
Система повинна генерувати попередження і рекомендації. Так, попереджень про конфлікт є основним засобом інформування диспетчера про ті завдання, які йому належить вирішити.
Процесор робочого місця диспетчера (РМД) також забезпечує диспетчера автоматизований¬ний допомогою. Зокрема, це може робитися при пошуку рішення в конфліктній ситуації або, коли диспетчер, збираючись видати дозвіл, хоче, щоб система дала ясну картину ситуації. Для цього знадобиться графічний дисплея і "засіб симуляції" або "мультиплікація", що дозволяють представити розвиток ситуації в повітряному просторі (наприклад, екстраполяцію зміни місць розташування ВС).
Функції планування будуть спрямовані на успішне рішення більшості проблем, що прогнозуються в зоні відповідальності, щоб перетворити конфліктні профілі польоту у безконфліктні і залишити для виконання лише обмежену кількість конфліктів, вирішити які легше за допомогою простих тактичних засобів. Функції планування повинні гарантувати, щоб робочі тактичні функції не мали великої кількості одночасних або складних