

4. Оптимальная стабилизация линейных стационарных систем (lti-систем)
Для линейной модели объекта управления
![]() (4.4.1)
(4.4.1)
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
допустимое управление имеет вид
![]() . (4.4.2)
. (4.4.2)
На движениях замкнутой системы
![]()
задается интегральный квадратичный функционал
![]() , (4.4.3)
, (4.4.3)
где
![]() – знакоположительная матрица с
постоянными компонентами,
– знакоположительная матрица с
постоянными компонентами,
![]() – положительно определенная матрица
с постоянными компонентами,
– положительно определенная матрица
с постоянными компонентами,
![]() – постоянный числовой множитель.
– постоянный числовой множитель.
Задача
LQR-оптимального синтеза
состоит в отыскании матрицы коэффициентов
усиления
![]() в управлении (4.4.2), чтобы функционал
(4.4.3) достигал наименьшего значения по
отношению ко всем другим матрицам
коэффициентов усиления, обеспечивающим
асимптотическую устойчивость замкнутой
системы
в управлении (4.4.2), чтобы функционал
(4.4.3) достигал наименьшего значения по
отношению ко всем другим матрицам
коэффициентов усиления, обеспечивающим
асимптотическую устойчивость замкнутой
системы
![]() (4.4.4)
(4.4.4)
где
![]() – множество
постоянных матриц
– множество
постоянных матриц
![]() таких, что корни характеристического
полинома
таких, что корни характеристического
полинома
![]() замкнутой системы расположены в открытой
левой комплексной полуплоскости.
замкнутой системы расположены в открытой
левой комплексной полуплоскости.
Алгоритм классического LQR-оптимального синтеза:
1. ![]()
его решение –
симметрическая положительно определенная
матрица
![]() :
полином
:
полином
![]() – гурвицев.
– гурвицев.
2.
![]()
![]()
3. Уравнения Ляпунова
![]()
![]() и
и
![]() – ?
– ?
4. Для
начальных условий
![]() значения функционала на оптимальном
решении
значения функционала на оптимальном
решении
![]()
![]()
![]() ,
,
![]()
![]() . (4.4.5)
. (4.4.5)
Ограничения
-
Пара матриц
 – стабилизируема.
– стабилизируема. -
 и
и
 .
. -
Пара матриц
 не должна иметь ненаблюдаемые собственные
числа на мнимой оси.
не должна иметь ненаблюдаемые собственные
числа на мнимой оси.
Первую и вторую операции алгоритма удобно выполнять с использованием функции lqry или lqr, а третью операцию – с помощью функции lyap, входящих в состав ППП Control System Toolbox системы MATLAB.
Следует
заметить, что реализация данного
алгоритма предполагает, что матрицы в
указанном выше функционале заранее
заданы. Однако при решении практических
задач априорное (предварительное)
задание этих параметров встречается
крайне редко. Поэтому основное
затруднение формирования квадратичного
критерия качества связано с выбором
элементов весовых матриц
![]() ,
,
![]() .
В подавляющем большинстве случаев их
приходится изменять непосредственно
в процессе вычислений, многократно
повторяя вычисления с тем, чтобы добиться
желаемого качества процесса с учетом
ограничений на реальные возможности
управлений. Конечным результатом таких
изменений является нахождение параметров
.
В подавляющем большинстве случаев их
приходится изменять непосредственно
в процессе вычислений, многократно
повторяя вычисления с тем, чтобы добиться
желаемого качества процесса с учетом
ограничений на реальные возможности
управлений. Конечным результатом таких
изменений является нахождение параметров
![]() и
и
![]() ,
а также оптимального по отношению к ним
регулятора с матрицей коэффициентов
,
а также оптимального по отношению к ним
регулятора с матрицей коэффициентов
![]() .
.
Пример 4.4.1.
Рассмотрим
модель движения по рельсам тележки
массы
![]() ,
которая с помощью пружины прикреплена
к неподвижному основанию, подвержена
действию силы
,
которая с помощью пружины прикреплена
к неподвижному основанию, подвержена
действию силы
![]() ,
с учетом силы трения, характеризующейся
коэффициентом
,
с учетом силы трения, характеризующейся
коэффициентом
![]() .
Коэффициент сжатия равен
.
Коэффициент сжатия равен
![]() .
.
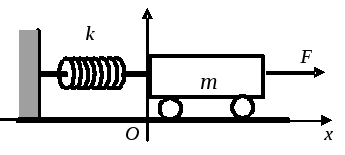
Рис. 4.4.1
Состояние
тележки в текущий момент времени
![]() ее положением
ее положением
![]() относительно точки
относительно точки
![]() и скоростью
и скоростью
![]() .
В соответствии со вторым законом Ньютона
.
В соответствии со вторым законом Ньютона
![]()
Предположим, что
воздействующая на тележку сила
![]() – управляющая, а измереется текущее
смещение тележки, т.е.
– управляющая, а измереется текущее
смещение тележки, т.е.
![]() ,
,
![]() .
.
Введем новые переменные и сведем уравнение второго порядка к системе второго порядка
![]()
 .
.
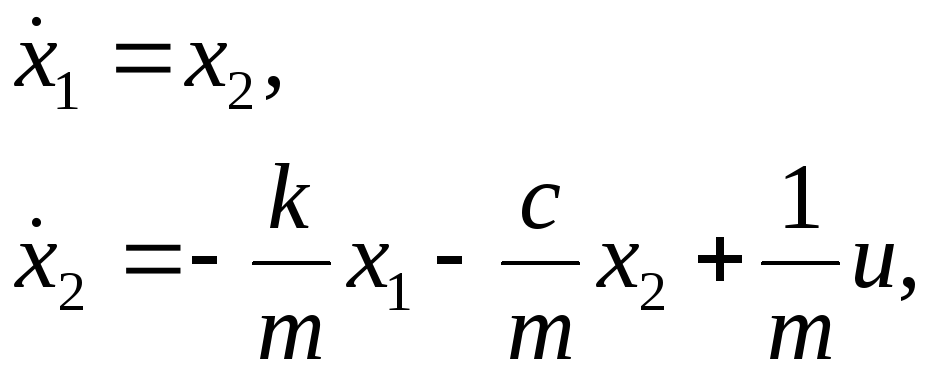
тогда
 (4.4.5)
(4.4.5)
где
 ,
,
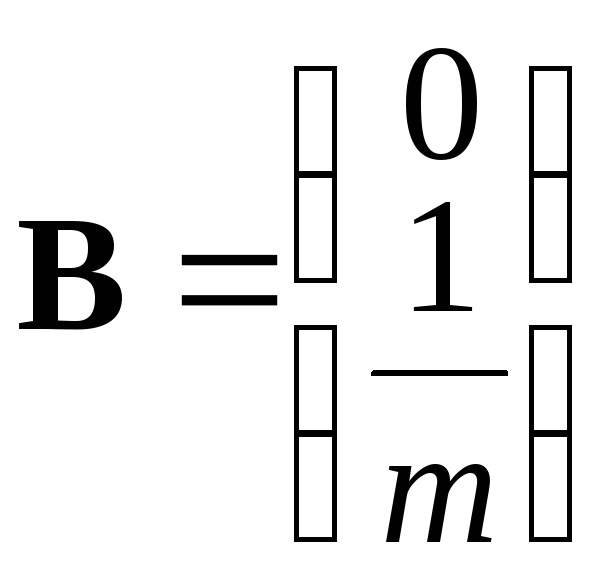 ,
,
![]() ,
,
![]() .
.
Зафиксируем параметры
![]() ,
,
![]() ,
,
![]() ,
,
тогда
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
и примем начальные
условия ненулевыми, то есть начальное
положение – смещение относительно
точки
![]() и начальная скорость ненулевые
и начальная скорость ненулевые
 .
.
Найдем собственные
значения матрицы
![]()
![]() ,
,
поскольку они расположены
в открытой левой полуплоскости комплексной
плоскости, то система при нулевом входном
управляющем воздействии является
асимптотически устойчивой, т.е. при
достаточно небольших отклонениях
![]() и
и
![]() тележка через некоторое время остановится
в точке
тележка через некоторое время остановится
в точке
![]() .
.
Построим Simulink-модель
движения (рис. 4.4.2), зададим матрицы
![]() ,
,
![]() ,
,
![]() и
и
![]() :
:
>> a=[0 1;-0.2 -0.1]
a =
0 1.0000
-0.2000 -0.1000
>> b=[0; 1]
b =
0
1
>> c=[1 0]
c =
1 0
>> d=0
d =
0
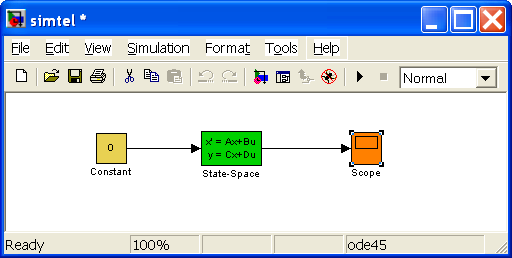
Рис. 4.4.2
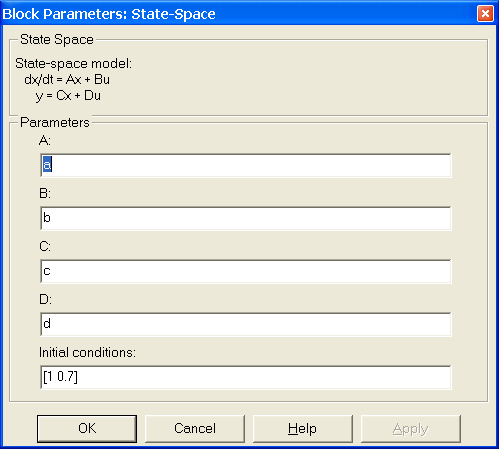
Рис. 4.4.3
Переходный процесс для такого движения изображен на рис. 4.4.4:
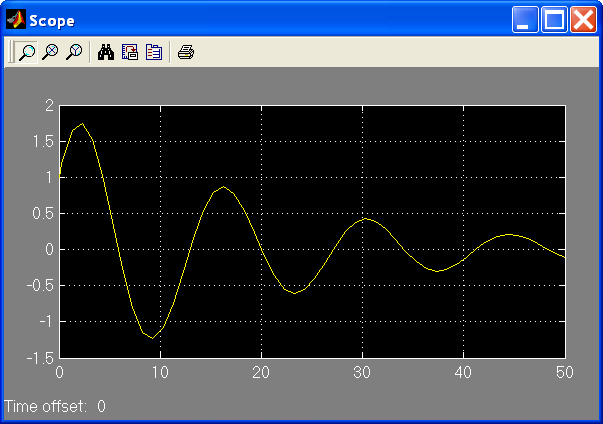
Рис. 4.4.4.
Теперь зададим функционал вида (4.4.3) матрицами в интеграле
![]() ,
,
![]() ,
,
![]()
![]() ,
,
и применим алгоритм нахождения оптимального в смысле заданного функионала управления
>>sys=ss(a,b,c,d);
>> [K,S,e]=lqry(sys,q,r);
>> K=-K;
![]() .
.
Собственные значения
матрицы
![]() равны
равны
![]() ,
,
полученная система также является асимптотически устойчивой, однако переходный процесс имеет лучшие характеристики (рис. 4.4.8), соответствующая модель изображена на рис. 4.4.5, параметры, задающие ее отдельные блоки представлены на рис. 4.4.6, рис. 4.4.7.
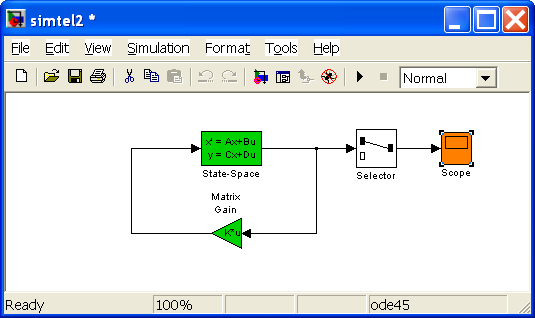
Рис. 4.4.5
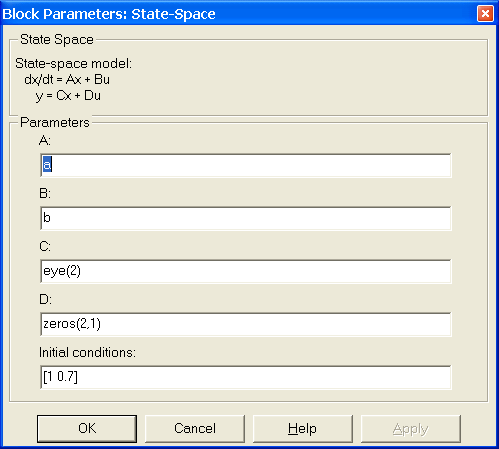
Рис. 4.4.6
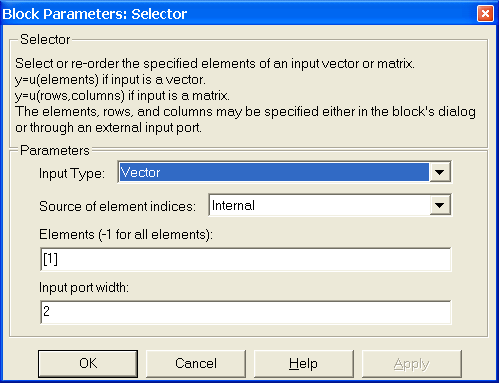
Рис. 4.4.7
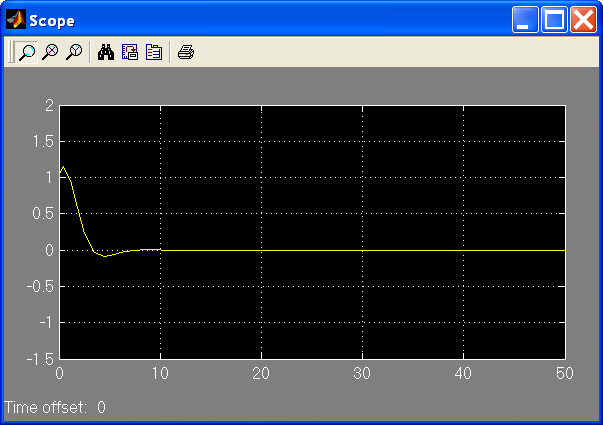
Рис. 4.4.8
Литература
1. Зубов В. И. Лекции по теории управления. – СПб., Изд-во СПбГУ, 2004.
2. Зубов В. И. Динамика управляемых систем. – М., Наука, 1982.
3. Андреев Ю.Н. Управление конечномерными линейными объектами. – М., Наука, 1976.
4. Р. Калман, П. Фалб, М. Арбиб. Очерки по математической теории систем. – М., Мир, 1971.
5.Х. Квакернаак, Р. Сиван. Линейные оптимальные системы управления. – М., Мир, 1977.
6. Ким Д.П. Теория автоматического управления. Т2. Многомерные, нелинейные, оптимальные и адаптивные системы. – М., Физматлит, 2004.
7. В.В.Керелин, В.Л.Харитонов, О.Н.Чижова. Лекции по теории стабилизации программных движений. – СПб., 2003.
8.Е.И.Веремей, В.М.Корчанов, М.В.Коровкин, С.В.Погожев. Компьютерное моделирование систем управления. – СПб., НИИ Химии СПбГУ, 2002.
9. В.С.Медведев, В.Г.Потемкин. Control System Toolbox. Matlab для студентов. – М., Диалог-МИФИ, 1999.
10. Дж.Дэбни, Т.Харман. Simulink 4. Секреты мастерства. – М., БИНОМ. Лаборатория знаний, 2003.
ОГЛАВЛЕНИЕ
Введение………………………………………………………………………….. 1
1. Общее представление о теории управления… .…………………........... 1
2. Состав и элементы информационно-управляющих систем………..........4
3. Вопросы оптимизации в теории управления ……………...……………5
4. Цели изучения курса и требования к уровню освоения дисциплины…..6
Глава 1. Управляемость и наблюдаемость в информационно-управляющих системах ..........................................................................................7
1. Программные управления в линейных системах …………………..........7
2. Критерии полной управляемости линейных систем …………………..12
3. Неполная управляемость линейных стационарных систем …………..16
4. Наблюдаемость в линейных системах …………………………………..20
5. Принцип двойственности …………………………………………...........23
6. Неполная наблюдаемость линейных стационарных систем ………......25
Глава 2. Описание линейной системы управления в частотной области...27
1. Преобразование Лапласа ………………………………………………...27
2. Оценка нормы матричной экспоненты .……………………..…………..30
3. Передаточная матрица и ее свойства ……………………………………35
Глава 3. Задача стабилизации информационных процессов ………………40
1. Непрерывная стабилизация линейных непрерывных систем с полной информацией ……………………………………………………………………..42
Глава 4. Анализ и синтез систем управления в среде MATLAB…..……….67
1. Исследование управляемости и наблюдаемости линейных систем… 68
2. Синтез стабилизирующего управления (регулятора) на основе задания желаемых собственных значений (полюсов) замкнутой системы.……………72
3. Синтез регулятора и наблюдателя на основе задания желаемых собственных значений замкнутой системы.…………………………………………..80
4. Синтез оптимального стабилизирующего управления с минимизацией квадратичного критерия качества …………………………………………….…88
Литература………………………………………………..………………………91