

Задание д8
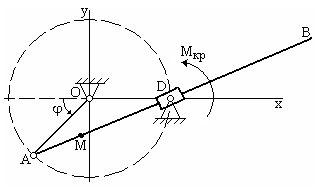
Полагая S = S1 = const, для обобщенной координаты φ, получить дифференциальное уравнение движения механической системы. Дополнительно учесть приложенный к стержню АВ крутящий момент Мкр = 100 Нм, который направлен так, что он способствует увеличению угла . Применить уравнение Лагранжа 11 рода. Значение величины S1 взять из таблицы К1. Силами трения пренебречь.
Решение
Для рассматриваемой механической системы с одной степенью свободы при использовании обобщенной координаты уравнение Лагранжа второго рода записывается следующим образом
![]() −
−
![]() ,
,
где Т – кинетическая энергия механической системы, Qφ – обобщенная сила, соответствующая обобщенной координате . Кинетическая энергия системы вычисляется как сумма кинетических энергий всех входящих в систему тел: стержня АВ и материальной точки М
Т = ТАВ + ТМ.
Выражение кинетической энергии рассматриваемой системы уже составлено ранее в задании Д5, оно имеет вид
Т
=
 + +
+ + .
.
Вынося
![]() за скобки, получаем
за скобки, получаем
Т
=![]() [
[![]() +
+![]() +
+![]() +
+![]() ].
].
Выполним с кинетической энергией Т действия, указанные в уравнении Лагранжа второго рода.
![]() =
=
![]() [
[![]() +
+![]() +
+![]() +
+![]() ],
],
![]() =
=
![]() [
[![]() +
+![]() +
+![]() +
+![]() ]
+ +
]
+ +![]() ,
,
![]() =
=
![]() =
=
![]() .
.
Обобщенная сила находятся по формуле
![]() =
=
 ,
,
где
![]() - обобщенная координата,
- обобщенная координата,
![]() -
сумма возможных работ действующих на
точки системы активных сил и реакций
связей. Обозначим на рисунке активные
силы, а так как связи, наложенные на
точки системы, являются идеальными, то
реакции связей не показываем.
-
сумма возможных работ действующих на
точки системы активных сил и реакций
связей. Обозначим на рисунке активные
силы, а так как связи, наложенные на
точки системы, являются идеальными, то
реакции связей не показываем.
Для вычисления
обобщенной силы
![]() соответствующей координате ,
зададим системе возможное перемещение
соответствующей координате ,
зададим системе возможное перемещение
![]() .
.

Найдем сумму элементарных работ действующих на систему сил на этом возможном перемещении
![]() =
=
![]() .
.
Возможные перемещения
![]() и
и
![]() были найдены ранее в задании Д6
были найдены ранее в задании Д6
![]() =
=
![]() =
=
![]() ,
,
![]() =
=
![]() =
=
![]() .
.
Возможное угловое
перемещение
![]() стержня
АВ равно половине
стержня
АВ равно половине
![]()
![]() =
=
![]() .
.
Подставив выражения возможных перемещений в сумму возможных работ сил, имеем
![]() =
=
![]() ,
,
откуда, после
сокращения на
![]() ,
получим выражение обобщенной силы,
соответствующей координате
,
получим выражение обобщенной силы,
соответствующей координате
![]() =
=
![]() .
.
Подставляя найденные выражения в уравнения Лагранжа второго рода, после преобразований и сокращений получаем дифференциальное уравнение движения системы
![]() [
[![]() +
+![]() +
+![]() +
+![]() ]
+
]
+
![]() =
=
![]() .
.
После подстановки заданных числовых значений параметров, позволяет записать окончательный вид дифференциального уравнения механической системы
![]()
![]() +
+![]() =
=
![]()
и получить выражение углового ускорения стержня
![]() (
(![]() -
-![]() )
/
)
/![]() .
.