Пример выполнения курсовой работы.
Кинематика.
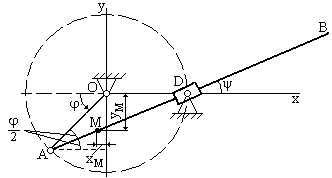
М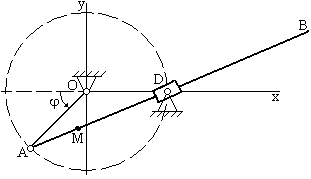 еханизм
состоит из кривошипа ОА длиной R = 40 см
и шатуна АВ в виде тонкого однородного
стержня длинной ℓ = 140 см и массой m1=15
кг. Шатун скользит без трения вдоль
направляющей, шарнирно закрепленной в
точке D на расстоянии ОD = ОА = R. На шатуне
находится материальная точка М массой
m2
= 5 кг. Положение кривошипа задается
углом φ, положение мат. точки – расстоянием
АМ = S. В начальный момент времени механизм
находился в покое при угле φ = 0. При
расчетах массой кривошипа ОА пренебречь.
еханизм
состоит из кривошипа ОА длиной R = 40 см
и шатуна АВ в виде тонкого однородного
стержня длинной ℓ = 140 см и массой m1=15
кг. Шатун скользит без трения вдоль
направляющей, шарнирно закрепленной в
точке D на расстоянии ОD = ОА = R. На шатуне
находится материальная точка М массой
m2
= 5 кг. Положение кривошипа задается
углом φ, положение мат. точки – расстоянием
АМ = S. В начальный момент времени механизм
находился в покое при угле φ = 0. При
расчетах массой кривошипа ОА пренебречь.
Задание к1
Считая, что угол
изменяется по закону
= (t)
=
![]() ,
а расстояние S
остается
постоянным S
= S1
= 30 см:
,
а расстояние S
остается
постоянным S
= S1
= 30 см:
-
составить уравнения движения точки М в декартовой системе координат x0y;
-
изобразить на рисунке траекторию движения точки М в окрестности положения, соответствующего моменту времени t = t1 сек (t1 =
 сек);
сек); -
для момента времени t = t1 определить и показать положение точки М на траектории, вычислить скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории точки;
-
выполнить построения векторов скорости и ускорения точки М для t = t1 на чертеже.
Решение
1. Для составления
уравнений движения точки М нужно выразить
координаты
![]() и
и
![]() через угол φ, так как угол φ является
функцией времени t.
через угол φ, так как угол φ является
функцией времени t.
![]() = – ОА
= – ОА![]() + АМ
+ АМ![]() .
.
Угол ψ найдем из равнобедренного треугольника ОАD
ψ = [1800
– (1800
– φ)] : 2 =
![]() ,
тогда
,
тогда
![]()
![]() = – ОА
= – ОА![]() + АМ
+ АМ![]() = – R
= – R![]() + S
+ S![]() .
.
Для координаты
![]() получим
получим
![]() = – ОА
= – ОА![]() + АМ
+ АМ![]() = – R
= – R![]() + S
+ S![]() .
.
Окончательно
уравнения движения точки М в декартовой
системе координат, после подстановки
в них значения функции
![]() ,
приобретают вид
,
приобретают вид
![]() = – R
= – R![]() + S
+ S![]() ,
,
![]() = – R
= – R![]() + S
+ S![]() .
.
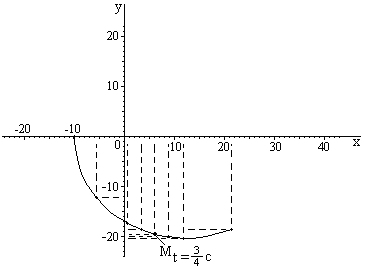
2. Для построения траектории движения точки М можно применить два подхода:
- исключив из уравнений движения точки параметр t, найти уравнение траектории и, задавая числовые значения для одной координаты, находить значения другой;
- определять координаты движущейся точки придавая параметру t значения немного меньшие и большие заданного момента времени t1 (например, 0,5t1, 0,8t1, 0,9t1, t1, 1,1t1, 1,2t1 и т.д.).
Исключение времени из полученных уравнений движения точки для данного случая затруднительно, поэтому применим второй подход: определим координаты движущейся точки в различные моменты времени.

На рисунке в
соответствии с расчетными данными
изобразим траекторию точки, отметив на
рисунке положение точки для заданного
момента времени t
=
![]() с.
с.
3. Для вычисления скорости точки, движение которой задано координатным способом, используем формулу
![]() ,
,
где
![]() ,
,
![]() проекции вектора скорости на оси
координат.
проекции вектора скорости на оси
координат.
![]() =
=
![]() = R
= R![]()
![]() – S
– S![]()
![]() .
.
![]() = – R
= – R![]()
![]() + S
+ S![]()
![]() ,
,
Вычислим значения
проекций вектора скорости на оси
координат в момент времени t =
![]() с, а затем и величину скорости точки.
с, а затем и величину скорости точки.
![]() 40
40![]()
![]() – 30
– 30![]()
![]() = 37,88 см/с,
= 37,88 см/с,
![]() –
40
–
40![]()
![]() + 30
+ 30![]()
![]() = – 9,78 см/с.
= – 9,78 см/с.
![]() см/с.
см/с.
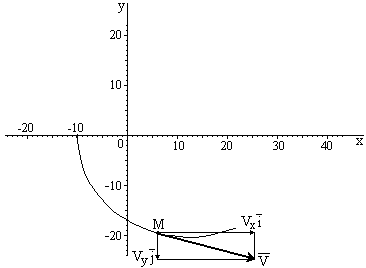
Построим для данного момента времени вектор скорости точки в масштабе на рисунке.
![]()
Величина ускорения точки при задании ее движения координатным способом вычисляется по формуле
![]() ,
,
где
![]() ,
,
![]() - проекции вектора ускорения точки на
оси координат.
- проекции вектора ускорения точки на
оси координат.
![]() =
R
=
R![]()
![]() + R
+ R![]() – S
– S![]()
![]() – S
– S![]() ∙
∙![]() ,
,
![]() = R
= R![]() – R
– R![]() –S
–S![]() ∙
∙![]() + S
+ S![]() ∙
∙![]() .
.
После подстановки
=
![]() ,
,
![]() ,
,
![]() ,
получим
,
получим
![]() R
R![]()
![]() – S
– S![]()
![]() ,
,
![]() R
R![]()
![]() – S
– S![]()
![]() .
.
При t =
![]() с, имеем
с, имеем
![]() 40
40![]()
![]() – 30
– 30![]()
![]() = 26,28 см/с2,
= 26,28 см/с2,
![]() 40
40![]()
![]() – 30
– 30![]()
![]() = 60,11 см/с2.
= 60,11 см/с2.
![]() =
=
![]() см/с2.
см/с2.
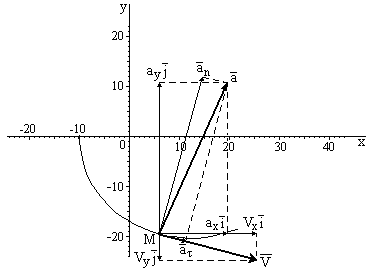
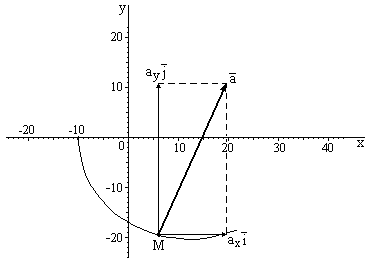
По проекциям ах
и ау
построим вектор полного ускорения
![]() на рисунке.
на рисунке.
![]()
Вычислим проекции вектора ускорения на касательную
![]() =
=
![]() см/с2
см/с2
и на главную нормаль
![]() =
=
![]() 64,81 см/с2.
64,81 см/с2.
Это позволяет с
помощью формулы
![]() найти радиус кривизны траектории точки
в данный момент времени
найти радиус кривизны траектории точки
в данный момент времени
![]() 23,61
см.
23,61
см.
Ниже на рисунке для момента времени t = t1 показано положение точки М на траектории и выполнены построения векторов скорости и ускорения точки.