

17. Достоинства и недостатки инс
Достоинства инерциальной навигационной системы - ИНС
Достоинствами ИНС являются непрерывная динамичная выдача пользователю полного навигационного решения (координаты, скорость, ускорения, угловая ориентация), возможность выдачи информации с высокой частотой, независимость от внешних источников информации.
Основными достоинствам БИНС по сравнению с платформенными системами считают большую надежность, меньшие габариты, вес, потребляемую мощность, стоимость и др.
Недостатки инерциальной навигационной системы - ИНС
ИНС обладают недостатком – ошибка в определении навигационных параметров накапливается с течением времени, а точность выходной информации зависит от точности чувствительных элементов. В качестве чувствительных элементов применяются прецизионные дорогостоящие гироскопы и акселерометры, которые сильно усложняют и удорожают систему. Для повышения долговременной точности необходимо периодически корректировать данные ИНС по показаниям внешних приборов. Это стало предпосылкой разработки алгоритмов интегрированных навигационных систем.
Современные измерители скорости хода судна
65. Поясните графически принцип действия корреляционного лага.
Принцип действия гидроакустического корреляционного лага основан на измерении временного сдвига между моментами прихода отраженных от грунта (дна) двух идентичных сигналов, принятых на движущемся судне разнесенными вдоль диаметральной плоскости антеннами.
Предположим,
что в днище судна (рис. 4.13) установлено
одна излучающая И и две приемные П1, и
П2 гидроакустические антенны. Приемные
антенны отстоят от излучающей на базовое
значение d. Антенна И излучает в сторону
дна ультразвуковые волны в пределах
широкого угла направленности![]() На каждую из приемных антенн П1 и П2
приходят эхо-сигналы, суммарные амплитуды
которых зависят от характера неровностей
участков дна, служащих рассеивателями
падающей на них звуковой волны.
На каждую из приемных антенн П1 и П2
приходят эхо-сигналы, суммарные амплитуды
которых зависят от характера неровностей
участков дна, служащих рассеивателями
падающей на них звуковой волны.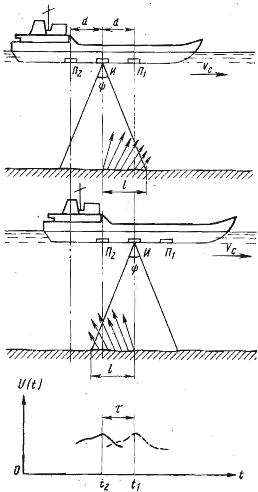
Поскольку
при движении судна положение антенн
относительно неровностей меняется
непрерывно, то непрерывно изменяется
и амплитуда принятых сигналов. В момент
времени t2
= t1+
![]() на заданную антенну поступает суммарный
сигнал, сформированный тем же участком
поверхности дна, что сформировал и
суммарный сигнал передней антенны в
некоторый предыдущий момент времени
t.
Отсюда следует, что огибающая эхо-сигнала,
принятого задней антенной, повторит
огибающую сигнала, поступившего на
переднюю антенну, с задержкой по времени
на значение величины
на заданную антенну поступает суммарный
сигнал, сформированный тем же участком
поверхности дна, что сформировал и
суммарный сигнал передней антенны в
некоторый предыдущий момент времени
t.
Отсюда следует, что огибающая эхо-сигнала,
принятого задней антенной, повторит
огибающую сигнала, поступившего на
переднюю антенну, с задержкой по времени
на значение величины
![]() где Vc — скорость судна.
где Vc — скорость судна.
Таким образом, задача определения скорости судна сводится к измерению временного сдвига т. Он находится в процессе корреляционной обработки сигналов путем ввода в канал передней антенны временной задержки и определения ее значения в момент наступления максимума взаимно-корреляционной функции.
Рассмотрим
структурную схему корреляционного лага
(рис. 4.14). На множительное устройство МУ
но одному входу поступает сигнал U (t2),
а по другому - сигнал U (tl +
![]() ),
задержанный, с помощью блока регулируемой
задержки БРЗ на время
),
задержанный, с помощью блока регулируемой
задержки БРЗ на время
![]() .
Управление значением вводимой временной
задержки осуществляется автоматически
по максимуму коэффициента взаимной
корреляции. Сигнал, прямо пропорциональный
временной задержке
.
Управление значением вводимой временной
задержки осуществляется автоматически
по максимуму коэффициента взаимной
корреляции. Сигнал, прямо пропорциональный
временной задержке
![]() ,
с выхода множительного устройства
поступает на интегратор И, выполняющий
роль сглаживающего звена. К выходу
интегратора подключено устройство
измерения скорости УИС и далее —
устройство измерения расстояния УИР.
,
с выхода множительного устройства
поступает на интегратор И, выполняющий
роль сглаживающего звена. К выходу
интегратора подключено устройство
измерения скорости УИС и далее —
устройство измерения расстояния УИР.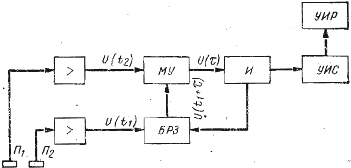
Если одну из приемных антенн корреляционного лага сместить относительно диаметральной плоскости в сторону борта, то появляется возможность после специальной обработки сигналов измерять и поперечную составляющую скорости судна и угол сноса.
Гидроакустический корреляционный лаг является абсолютным и при его построении (как и при построении доплеровского) может быть использован режим импульсного или непрерывного излучения.
По сравнению с доплеровскнм он имеет следующие преимущества:
одновременно с измерением скорости измеряется глубина под килем;
на точность измерения скорости судна не влияет изменение скорости звука;
широкие диаграммы направленности акустических антенн не требуется стабилизировать на качке.
Корреляционный лаг характеризуется довольно высокой точностью измерения: погрешность измерения скорости составляет до ±0,1 уз, пройденного расстояния — до ±0,2 %, глубины под килем ±1 %.