

47. Сравните мк с другими типами ку. Сделайте вывод о целесообразности и перспективах дальнейшего использования мк на морских судах.
+: автономность, современные модели МК позволяют компенсировать возникающие девиации.
-: необходимость постоянного контроля поправок МК, низкая точность курсоуказания.
На протяжении многих веков на морских судах устанавливаются стрелочные магнитные компасы (МК). Наличие у Земли достаточно стабильного магнитного поля позволяет и далее использовать МК в морской навигации, но, в основном, в качестве резервных курсоуказателей в силу их невысокой точности. Главное преимущество МК – полная автономность, в том числе и от источников электропитания. Современные модели позволяют в широком диапазоне компенсировать возникающие девиации разного происхождения. Используемые в МК феррозондовые датчики дают возможность получать электрический сигнал, пропорциональный курсу судна, который после усиления может быть использован в судовых навигационных системах и электрических репитерах. На небольших судах, яхтах и катерах выгодно вместо классических стрелочных МК использовать так называемые индукционные (флюксгейт) компасы. Они достаточно доступны по цене и позволяют автоматически вычислять и учитывать поправку путем выполнения одной полной циркуляции судна.
Системы инерциальной навигации на основе лазерных и волоконно-оптических технологий.
14,15,16. Поясните кратко принцип действия лазерного, волоконно-оптического гк (см. Консп.).
Принцип
действия
основан на эффекте
Саньяка
и теоретически объясняется с помощью
специальной теорией относительности
(СТО). Согласно СТО скорость света
постоянна в любой инерциальной системе
отсчёта. В то время как в неинерциальной
системе она может отличаться от c. При
посылке луча света в направлении вращения
прибора и против направления вращения
разница во времени прихода лучей
(определяемая интерферометром) позволяет
найти разницу оптических путей лучей
в инерциальной системе отсчёта, и,
следовательно, величину углового
поворота прибора за время прохождения
луча.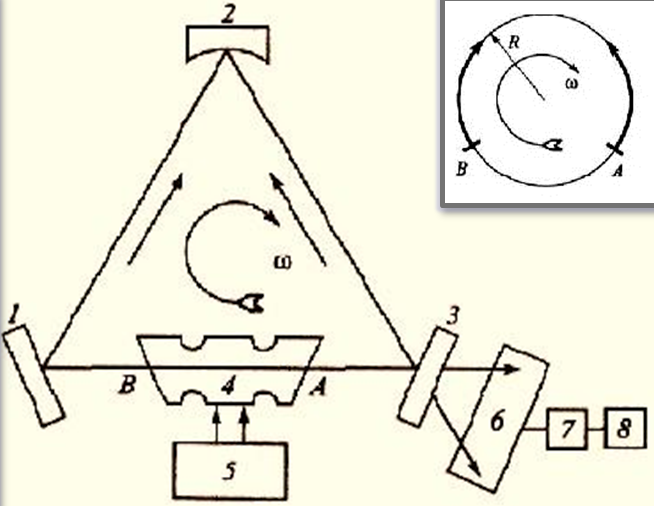
Лазерный гироскоп обычно представляет собой кольцевой резонатор с тремя или четырьмя зеркалами, расположенными по углам полости в форме треугольника или квадрата. Два лазерных луча, генерируемые и усиливающиеся в полостях гироскопа, непрерывно циркулируют по резонатору в противоположных направлениях. В датчике формируется интерференционная картина из светлых и тёмных полос. Положение полос не меняется если гироскоп не вращается (в плоскости кольцевого контура) относительно инерциальной системы отсчёта, а при повороте резонатора (корпуса гироскопа) фотоприёмники измеряют угол поворота, считая пробегающие по ним интерференционные полосы.
Таким образом в лазерном гироскопе создаётся и поддерживается стоячая волна, а её узлы и пучности в идеальном случае связаны с инерциальной системой отсчёта. На точность подобных гироскопов негативно влияет захват частот в средах, в которых проходит луч лазера. Таким образом возникает нелинейность характеристики типа зона нечувствительности.
Чувствительность лазерного гироскопа пропорциональна площади поверхности, ограниченной лучами лазера.
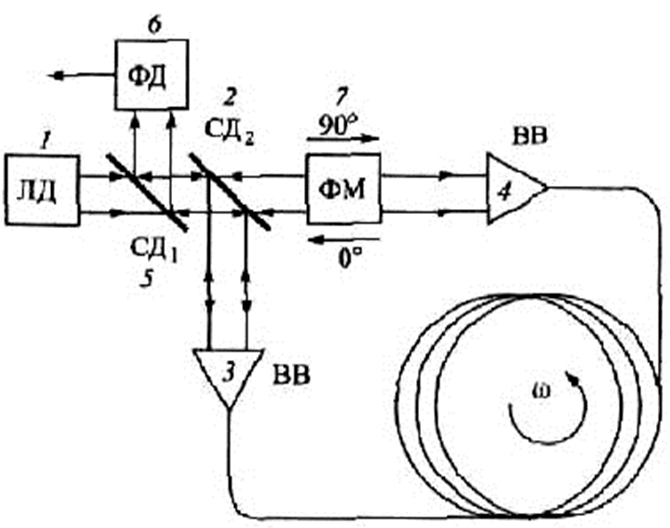
В оптическом гироскопе широкое применение находят частотные и фазовые модуляторы. Первого типа модуляторы переводят фазу Саньяка в переменные изменения разности частот противоположно бегущих лучей; при компенсации фазы Саньяка разностная частота пропорциональна угловой скорости вращения Ω. Достоинством частотных модуляторов при использовании в ВОГ является представление выходного сигнала в цифровом виде. Второго типа модуляторы переводят фазу Саньяка в изменение амплитуды переменного сигнала, что исключает низкочастотные шумы и облегчает измерение информационного параметра. Частотные модуляторы основаны на акустооптическом эффекте, который состоит в том, что при прохождении в среде ультразвуковых колебании в ней появляются области с механическими напряжениями (области сжатия и разряжения), это приводит к изменению коэффициента преломления среды. Вызванные ультразвуковой волной изменения коэффициента преломления среды образуют центры дифракции для падающего света. Частотный сдвиг света определяется частотой ультразвуковых колебаний.
===========
Совместная обработка информации от акселерометра и измерителей угловой скорости позволяют:
-Измеряя уголовую скорость в конечном итоге определять ориентацию объекта, направление его движения, пройдененое расстояние и скорость движения
-Для обеспечения конкурентноспособной точности традиционными КУ
-Измерение объектов(?) и ω дополнительно производится с высокой точностью.
Для оперативной обработки результатов измерений и решения навигационных задач требуется высокое быстродействия, поэтому в навигации такие системы получили распространение последние 2 десятилетия. В этих системах в качестве измерителей угловой скорости используются оптические гироскопы (лазерные волоконно-оптические). Для измерения абсолютных углов скорости объекта необходима триада ортогонально расположенных оптических гироскопа (ОГ), жестко связанных с объектом (пристегнутых). Strap-down systems.