

Установка плоскостью
П ри
данной схеме установки в качестве
установочной поверхности выбирают
плоскость достаточных размеров, которая
смогла бы обеспечить устойчивое
положение заготовки или изделия. В
качестве установочной базы (поверхности)
можно использовать необработанные, то
есть поверхности, образованные литьём,
штамповкой и т.п. и обработанные (чистовым
и черновым точением, шлифованием и
т.д.) поверхности. При использовании
необработанных поверхностей, наиболее
выступающие микровыступы могут
образовать установочный треугольник,
который не может обеспечить устойчивое
положение заготовки или изделия при
её установке. В качестве контактных
элементов приспособления в данном
случае используются специальные
установочные элементы – калёные пальцы
с контактными поверхностями различной
конфигурации. При использовании в
качестве установочных баз обработанных
поверхностей кроме рассмотренных
контактных элементов можно использовать
установочные пластины.
ри
данной схеме установки в качестве
установочной поверхности выбирают
плоскость достаточных размеров, которая
смогла бы обеспечить устойчивое
положение заготовки или изделия. В
качестве установочной базы (поверхности)
можно использовать необработанные, то
есть поверхности, образованные литьём,
штамповкой и т.п. и обработанные (чистовым
и черновым точением, шлифованием и
т.д.) поверхности. При использовании
необработанных поверхностей, наиболее
выступающие микровыступы могут
образовать установочный треугольник,
который не может обеспечить устойчивое
положение заготовки или изделия при
её установке. В качестве контактных
элементов приспособления в данном
случае используются специальные
установочные элементы – калёные пальцы
с контактными поверхностями различной
конфигурации. При использовании в
качестве установочных баз обработанных
поверхностей кроме рассмотренных
контактных элементов можно использовать
установочные пластины.
Установка цилиндрической поверхностью
М
![]()
![]() ожно
рассмотреть две совершенно равноценные
по точности схемы: когда установочная
поверхность детали является охватываемой
(смотри рисунок) и охватывающей (при
установке на цилиндрический палец).
Остановимся на первом варианте. Для
того чтобы при любом сочетании размеров
сопрягаемых поверхностей в пределах
допуска необходимо, чтобы всегда имел
место минимальный гарантированный
зазор: Sгар=Dп
min-Dдет
max. Неопределённость
положения детали, то есть погрешность
её установки определяется максима-льно
возможным зазором: Smax=Dп
max-Dдет
min=Dп
min+TDп-Dдет
max+TDдет,
тогда Пу=Smax=
=Sгар+TDп+TDдет.
Вывод: чем ниже допуски, тем меньше
погрешность установки.
ожно
рассмотреть две совершенно равноценные
по точности схемы: когда установочная
поверхность детали является охватываемой
(смотри рисунок) и охватывающей (при
установке на цилиндрический палец).
Остановимся на первом варианте. Для
того чтобы при любом сочетании размеров
сопрягаемых поверхностей в пределах
допуска необходимо, чтобы всегда имел
место минимальный гарантированный
зазор: Sгар=Dп
min-Dдет
max. Неопределённость
положения детали, то есть погрешность
её установки определяется максима-льно
возможным зазором: Smax=Dп
max-Dдет
min=Dп
min+TDп-Dдет
max+TDдет,
тогда Пу=Smax=
=Sгар+TDп+TDдет.
Вывод: чем ниже допуски, тем меньше
погрешность установки.
Установка призмой
П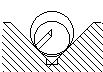
![]()
![]()
![]()
![]() ри
данном способе установки, в результате
изменения диаметра детали в пределах
допуска от максимального до минимального,
происходит изменение места положения
её центра, то есть появляется некоторая
неопределённость положения детали,
которая и является погрешностью
установки. Величину этой погрешности
можно определить, решив несложную
геометрическую задачу (смотри рисунок).
СА=(D max-D
min)/2, величина
СА равна половине допуска детали, из
треугольника АВСАВ=СА/sin(/2),
таким образом, погрешность установки
Пу=АВ=TD/[2
sin(/2)].
Анализируя последнюю формулу, можно
заметить, что с увеличением угла призмы
уменьшается погрешность, но при этом
снижается устойчивость положения
детали. Поэтому в промышленности принято
выпускать призмы с углом =90.
При таком значении угла
Пу=0,7TD,
следовательно, чем точнее деталь, тем
меньше погрешность установки.
ри
данном способе установки, в результате
изменения диаметра детали в пределах
допуска от максимального до минимального,
происходит изменение места положения
её центра, то есть появляется некоторая
неопределённость положения детали,
которая и является погрешностью
установки. Величину этой погрешности
можно определить, решив несложную
геометрическую задачу (смотри рисунок).
СА=(D max-D
min)/2, величина
СА равна половине допуска детали, из
треугольника АВСАВ=СА/sin(/2),
таким образом, погрешность установки
Пу=АВ=TD/[2
sin(/2)].
Анализируя последнюю формулу, можно
заметить, что с увеличением угла призмы
уменьшается погрешность, но при этом
снижается устойчивость положения
детали. Поэтому в промышленности принято
выпускать призмы с углом =90.
При таком значении угла
Пу=0,7TD,
следовательно, чем точнее деталь, тем
меньше погрешность установки.
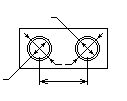
Установка плоскостью и двумя отверстиями
П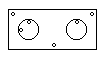
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ри
этой схеме установки используют
сравнительно большую плоскость, на
которой создают контакты по трём точкам
и относительно короткие отверстия, в
одном из которых создаётся контакт по
двум точкам, в другом – по одной. Эта
схема отличается от установки
цилиндрической поверхностью тем, что
для обеспечения гарантированной
установки детали при любом сочетании
её размеров и размеров приспособления
зазор должен быть увеличен для компенсации
неточности расстояния между установочными
отверстиями и установочными элементами.
Индекс п проставлен у размеров,
относящихся к приспособлению, то есть
D1n
и D1n
– диаметры установочных пальцев
приспособления, Сп –
межцентровое расстояние между центрами
установочных пальцев. D1
и D2 –
диаметры отверстий деталей, которыми
она устанавливается, С – межцентровое
расстояние между этими отверстиями.
Увеличение зазора для гарантированной
установки происходит за счёт уменьшения
максимального диаметра установочного
пальца относительно минимального
размера отверстия на величину
гарантированного зазора и полусумму
допусков межцентровых расстояний С
и Сп: D1n
max =D1
min-(TC+TCn)/2,
ри
этой схеме установки используют
сравнительно большую плоскость, на
которой создают контакты по трём точкам
и относительно короткие отверстия, в
одном из которых создаётся контакт по
двум точкам, в другом – по одной. Эта
схема отличается от установки
цилиндрической поверхностью тем, что
для обеспечения гарантированной
установки детали при любом сочетании
её размеров и размеров приспособления
зазор должен быть увеличен для компенсации
неточности расстояния между установочными
отверстиями и установочными элементами.
Индекс п проставлен у размеров,
относящихся к приспособлению, то есть
D1n
и D1n
– диаметры установочных пальцев
приспособления, Сп –
межцентровое расстояние между центрами
установочных пальцев. D1
и D2 –
диаметры отверстий деталей, которыми
она устанавливается, С – межцентровое
расстояние между этими отверстиями.
Увеличение зазора для гарантированной
установки происходит за счёт уменьшения
максимального диаметра установочного
пальца относительно минимального
размера отверстия на величину
гарантированного зазора и полусумму
допусков межцентровых расстояний С
и Сп: D1n
max =D1
min-(TC+TCn)/2,
тогда D1n min=D1n max-TD1n=D1 min-Sгар-(TC+TCn)/2-TD1n. Максимальная погрешность установки будет определяться максимальным зазором, то есть: Пу max=Smax=D1 max-D1n min=
=D1 max-D1 min+Sгар+(TC+TCn)/2+TD1n=TD1+TD1n+(TC+TCn)/2.
С![]()

![]() равнив
полученную формулу с формулой для
вычисления погрешности при установке
одним отверстием (см. выше), можно
отметить, что в последнем случае,
погрешность возросла на полусумму
межцентровых расстояний. Это происходит
за счёт дублирования функций установки
в направлении S. В
этом направлении создаётся контакт,
то есть заготовка лишается степени
свободы дважды. Для исключения
дублирования в направлении контролируемого
размера S используют
схему с ромбическим пальцем. В этом
случае величина смещения детали
относительно этого пальца будет
определяться величиной М, при этом, чем
меньше ширина ленточки b,
тем больше М, тем больше вероятность
исключения функции дублирования.
Очевидно, что при малых значениях b
происходит интенсивный износ пальцев,
поэтому при b=[SгарD/(TC+TCn)]-(TC+TCn)/2
его значение выбирают из условия b0,1D.
Данная схема установки широко применяется
при обработке корпусных деталей. В
условиях автоматизированного производства
по данной схеме корпусные детали
устанавливаются на полётах, при этом
при этом соблюдается принцип постоянства
баз: деталь подаётся на следующую
позицию прямо на полёте. Для повышения
точности установки выбирают наиболее
точные отверстия. Если таковых не
имеется, то в качестве установочных
можно выбрать любые два крепёжных
отверстия, обработав их с высокой
степенью точности.
равнив
полученную формулу с формулой для
вычисления погрешности при установке
одним отверстием (см. выше), можно
отметить, что в последнем случае,
погрешность возросла на полусумму
межцентровых расстояний. Это происходит
за счёт дублирования функций установки
в направлении S. В
этом направлении создаётся контакт,
то есть заготовка лишается степени
свободы дважды. Для исключения
дублирования в направлении контролируемого
размера S используют
схему с ромбическим пальцем. В этом
случае величина смещения детали
относительно этого пальца будет
определяться величиной М, при этом, чем
меньше ширина ленточки b,
тем больше М, тем больше вероятность
исключения функции дублирования.
Очевидно, что при малых значениях b
происходит интенсивный износ пальцев,
поэтому при b=[SгарD/(TC+TCn)]-(TC+TCn)/2
его значение выбирают из условия b0,1D.
Данная схема установки широко применяется
при обработке корпусных деталей. В
условиях автоматизированного производства
по данной схеме корпусные детали
устанавливаются на полётах, при этом
при этом соблюдается принцип постоянства
баз: деталь подаётся на следующую
позицию прямо на полёте. Для повышения
точности установки выбирают наиболее
точные отверстия. Если таковых не
имеется, то в качестве установочных
можно выбрать любые два крепёжных
отверстия, обработав их с высокой
степенью точности.