

6.4 Уточнение лах параллельного корректирующего устройства
Поскольку
описанная методика графического синтеза
предполагает выполнение приведенного
ранее неравенства, то в интервале частот,
где это неравенство не выполняется, ЛАХ
обратной связи оказывается неопределенной.
Так как этот интервал находится в
высокочастотной части желаемой ЛАХ,
есть основание полагать, что в существенном
для качества системы диапазоне частот
(НЧ- и СЧ-области ЛАХ) будет достаточно
хорошее совпадение ЛАХ скорректированной
системы и желаемой ЛАХ, т. е. вид ЛАХ
обратной связи вне указанного диапазона
не очень сильно будет влиять на
динамические свойства системы. Тем не
менее, некоторое влияние конкретного
вида высокочастотной части
 может оказаться заметным, поэтому при
ее уточнении следует учитывать следующие
требования:
может оказаться заметным, поэтому при
ее уточнении следует учитывать следующие
требования:
а) по соображениям реализуемости наклон последней асимптоты ЛАХ обратной связи не должен быть положительным; следует также стремиться к тому, чтобы корректирующее звено получилось как можно более простым;
б) запас устойчивости внутреннего контура должен быть не менее 35˚.
Лучше
всего сделать так, чтобы три последних
участка
 имели коэффициенты наклона 0, +20 дБ/дек
и 0, причем участок с наклоном +20
дБ/дек должен начинаться на частоте
имели коэффициенты наклона 0, +20 дБ/дек
и 0, причем участок с наклоном +20
дБ/дек должен начинаться на частоте
 ,
а заканчиваться на частоте, значение
которой как раз и нужно определить из
условия обеспечения минимально
необходимого запаса устойчивости
внутреннего контура.
,
а заканчиваться на частоте, значение
которой как раз и нужно определить из
условия обеспечения минимально
необходимого запаса устойчивости
внутреннего контура.
Для
определения
 есть 2 способа, рассмотрим каждый из
них:
есть 2 способа, рассмотрим каждый из
них:
-
По формуле:

Применим эту формулу, учитывая что, запас устойчивости должен быть не менее 35o.



Отсюда
имеем:
 .
.
-
Построим ЛАХ и ЛФХ разомкнутого внутреннего контура, найдём
 из условия что
на частоте среза:
из условия что
на частоте среза:
 .
.


 ;
;
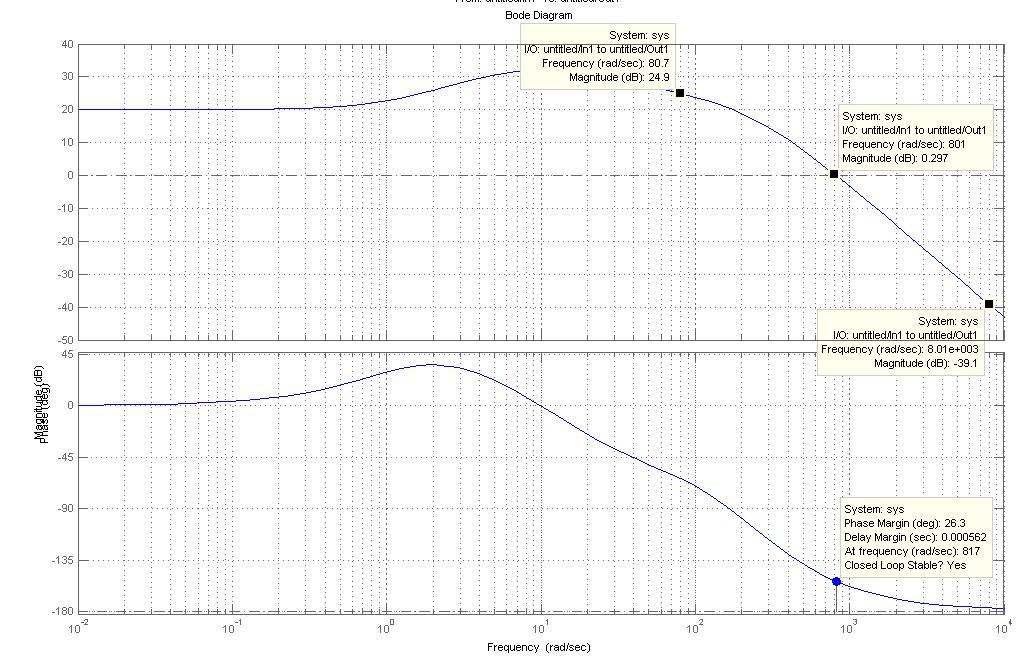
Рис. 5 ЛАХ и ЛФХ разомкнутого внутреннего контура
Внесём
поправки в
 ,
все построения представлены в приложении
7.
,
все построения представлены в приложении
7.
6.5 Определение лах скорректированной системы
После того как окончательно сформирована ЛАХ корректирующей обратной связи, необходимо грубо оценить, насколько ЛАХ скорректированной системы соответствует желаемой ЛАХ. Для этого рекомендуется построить асимптотическую ЛАХ скорректированной системы, используя описанный способ приближенного построения асимптотических ЛАХ параллельных соединений звеньев. С его помощью можно легко построить ЛАХ замкнутого внутреннего контура, после чего следует сложить ее с ЛАХ неохваченной части
-
 .
. -
 .
.
Все построения представлены в приложении 8.
6.6 Вопросы реализации корректирующего устройства
-
Выбор ТГ
Реализация параллельной коррекции предусматривает, прежде всего, выбор тахогенератора. Лучше всего использовать тахогенератор постоянного тока, так как при этом не возникает проблем с его реакцией на изменение направления вращения. Номинальная частота вращения тахогенератора должна быть не меньше максимальной частоты вращения исполнительного двигателя. следует выбирать наиболее современные типы тахогенераторов, удовлетворяющих требованиям:
– малая удельная ЭДС,
– компактность,
– прецизионность.
Этим условиям, например, удовлетворяет тахогенератор 2.5ТГП–6, основные характеристики которого таковы:
-
удельная ЭДС 606 мВ*мин/об;
-
номинальная частота вращения 6000 об/мин;
-
класс точности 0.1;
-
рабочий диапазон частот вращения 5-6000 об/мин;
-
масса не более 0.1 кг;
Определим коэффициент передачи тахогенератора:


-
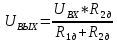
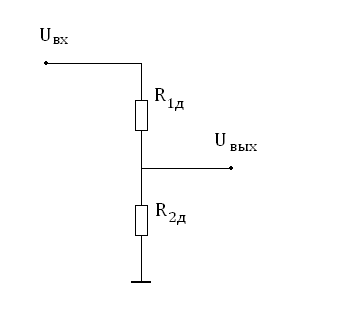
Расчёт делителя напряжения.
Если при номинальной скорости вращения двигателя напряжение тахогенератора превышает уровень 7–8 В, в корректирующую обратную связь следует ввести делитель напряжения.
ОУ
использованные в схеме ОС имеют входное
напряжение порядка 10 В. На выходе ТГ: 36
В. Необходимо ввести делитель напряжения,
на выходе делителя напряжение должно
быть со значением
 В.
В.
Назначим:
 ;
;
 ;
;
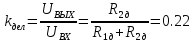
Коэффициент передачи делителя напряжения:
-
Реализация КУ.
При использовании пассивной коррекции для реализации корректирующего звена может оказаться необходимым использование каскада из двух RC-четырехполюсников. В этом случае следует обеспечить согласование их входных и выходных сопротивлений; при возникновении проблем рекомендуется применение разделительного операционного усилителя. Схемы RC-четырехполюсников, имеющие типовые ЛАХ, приведены во многих учебниках и справочниках. Необходимо рассчитать параметры всех элементов и выбрать их из стандартного ряда.
Часто удобнее применить активную коррекцию на операционных усилителях. Предложен табличный метод синтеза активных корректирующих звеньев, при котором передаточная функция звена (определенная по его ЛАХ) представляется в операторной форме в виде отношения проводимостей RC-цепей, включаемых соответственно на вход усилителя и в обратную связь. Передаточные проводимости некоторых RC-цепей приведены в таблице. Необходимо точно выполнить рекомендацию относительно представления передаточной функции КЗ в виде отношения проводимостей. Следует выписать выражения для этих проводимостей и отдавать себе отчет в том, в какую цепь усилителя включена соответствующая RC-цепь.
По
 определим
определим
 :
:
 ;
;
 ;
;
 ;
; ;
;
Для реализации используем справочные функции:
Передаточная
проводимость: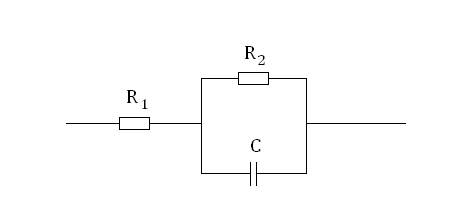
G
=
 ;
;

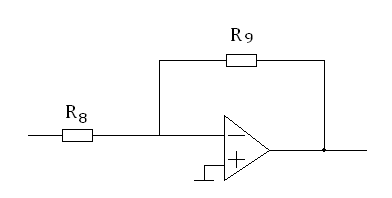
Электрическая схема реализации корректирующего звена.
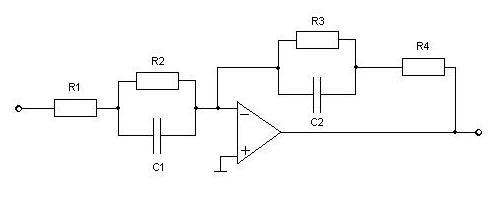
Передаточная функция корректирующего звена:
 ;
;

Зададим параметры:

 ;
;

Расчёт проводимости входной цепи:
 ;
;

 ;
;
 ;
;
 ;
;
Расчёт проводимости обратной связи:
 ;
;

 ;
;
 ;
;
 ;
;
Расчёт параметров:
 ;
;
Зададим:
 ;
;

 ;
;

 ;
;


|
|
|
|
|
|
|
|
|
|
|
0.93 |
0,195 |
0,0155 |
0,0039 |
0,228 |
0,93 |
0,195 |
0,00419 |
0,0795 |









-
Расчёт суммирующего усилителя.
 ;
;

 ;
;
Электрическая схема суммирующего усилителя:


Пусть
 ,
тогда
,
тогда

-
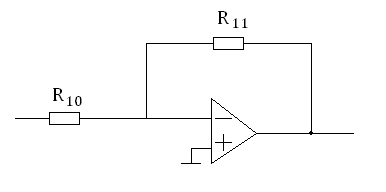
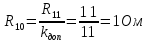
Расчёт усилителей для реализации kу1 и kдоп.


 ;
;

 ;
;

 ;
;





Все сопротивления в таблице даны в Омах, а емкости в мкФ.
|
|
|
|
|
|
|
270 |
62000 |
1200 |
13000 |
4700 |





|
|
|
|
|
|
|
|
|
|
1500 |
3000 |
0.18 |
13 |
1 |
11 |
10 |
20 |








Принципиальная схема следящей системы представлена в приложении 9.