

|
|
|
3.4. Равновесие произвольной пространственной системы сил |
|
|||||||||||||||
|
Для равновесия пространственной системы сил необходимо и достаточно, |
||||||||||||||||||
чтобы суммы проекций сил на три оси и суммы моментов сил относительно |
|||||||||||||||||||
этих осей равнялись нулю, т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Fix 0; |
Fiy 0; |
Fiz 0; |
|
|
|
|
|
(20) |
||||
|
|
|
|
|
|
mx Fi 0; my Fi 0; mz Fi 0. |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Вопросы и задачи |
|
|
|
|
|
|
|
|||||
|
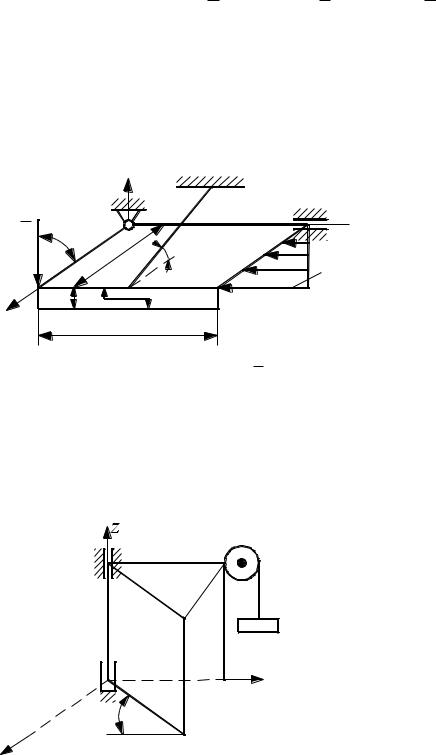
3.4.1 Две однородные плиты весом Р1 |
и Р2, сваренные под прямым углом |
|||||||||||||||||
друг к другу, крепятся и нагружаются так, как изображено на рисунке. В точке |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
А – сферический шарнир. Нагрузка распределена по линейному закону, дей- |
|||||||||||||||||||
ствующему в плоскости хАу. |
|
|
|
|
1. |
Заменить |
|
Т |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
z |
|
|
|
|
|
|
распределенную |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
нагрузку |
|
равнодействую- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Q |
|
|
|
А |
|
|
|
В |
|
2. |
щей. |
Н |
|
|
||||
|
|
|
|
|
|
|
|
|
|
Указать объект равновесия. |
|||||||||
|
|
|
|
|
30° |
|
|
|
|
|
|||||||||
|
|
45° |
|
а |
|
|
qmax |
3. ИзобразитьБ на рисунке все |
|||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||
x |
|
|
|
|
|
М |
|
|
|
|
|
|
силы, |
приложенные к объ- |
|||||
|
|
d |
|
|
С |
|
|
|
|
|
екту равновесия. |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Е |
|
|
|
|
b |
D |
|
|
|
й |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
4. |
Составить уравнение равно- |
|||||||||
|
|
|
|
|
|
|
|
|
и |
весия |
|
для |
определения |
||||||
|
реакции невесомого стержня T . |
|
|
|
|
|
|
|
|
||||||||||
5. |
Составить уравнение равн весиярдля пределения zB . |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
3.4.2 Прямоугольная дверь АВЕС, имеющая вертикальную ось вращения АВ, |
||||||||||||||||||
открыта на угол DAC =60°тудерживается в этом положении двумя веревками |
|||||||||||||||||||
EF и CD. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Дано: вес двери Qи=54кН; Р=40кН; АС=AD=1,6м; АВ =2,2 м. |
|
|
||||||||||||||||
|
|
|
|
|
|
з |
|
|
|
1. |
Указать объект равновесия. |
|
|||||||
|
|
|
|
А |
D |
|
|
2. |
Указать связи и показать все си- |
||||||||||
|
|
|
|
|
о |
|
|
|
|
|
лы, приложенные к выбранному |
||||||||
|
|
|
|
|
|
|
|
|
|
объекту. |
|
|
|
|
|
|
|||
|
|
|
п |
|
|
|
|
3. |
|
|
|
|
|
|
|||||
|
|
|
С |
|
Р |
|
Определить |
вид |
системы |
сил, |
|||||||||
|
е |
|
|
|
|
|
приложенный кобъекту. |
|
|||||||||||
|
|
|
|
|
|
4. |
|
||||||||||||
|
|
|
|
|
|
Составить уравнение равновесия, |
|||||||||||||
Р |
|
В |
|
у |
|
|
|
|
позволяющее |
рассчитать |
натя- |
||||||||
|
|
|
|
|
|
|
|
жение веревки EF. |
|
|
|||||||||
|
|
|
|
|
|
|
5. |
|
|
||||||||||
|
|
|
60° |
|
|
|
Определить момент силы Р1 от- |
||||||||||||
х |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
F |
Е |
|
|
|
|
|
носительно BX P1 P . |
|
|
||||||
|
|
|
|
|
|
|
|
6. |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Определить |
|
вертикальную |
со- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
ставляющую подпятника zB. |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
3.4.3 |
|
|
|
|
|
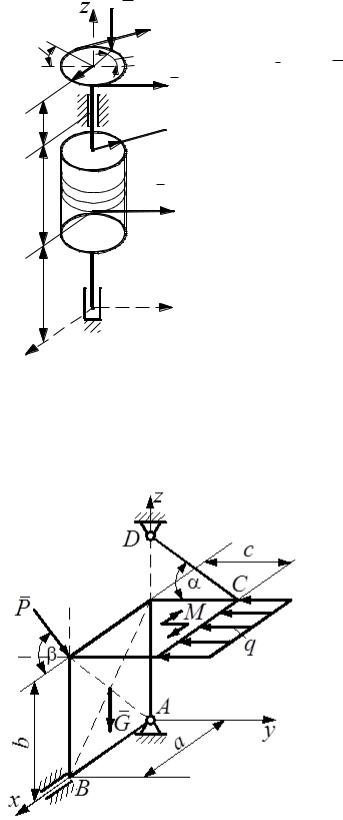
Вал АВ, закрепленный подпятником А и цилин- |
|||||||||||
|
|
Q Т |
|
|
|
||||||||||||
|
|
|
дрическим подшипником В, |
находится в равновесии |
|||||||||||||
30° |
|
|
45° |
|
под действием нагрузок, |
как показано на рисунке. |
|||||||||||
|
|
|
|
T 2t; t || Ay; T |
Az4 P || Ay . |
|
|
|
|
||||||||
R |
|
|
t |
|
|
|
|
||||||||||
|
|
1. |
Назвать реакции подпятника А и цилиндрического |
||||||||||||||
|
|
|
|||||||||||||||
с |
|
В |
r |
|
|
подшипника В. |
|
|
|
|
|
|
|
||||
|
|
|
|
2. Какая система сил действует на вал АВ? |
|
|
|||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
3. |
Записать аналитическое условие равновесия си- |
|||||||||||
|
|
|
|
|
|
стемы сил, под действием которой находится вал |
|||||||||||
b |
|
|
Р |
|
|
АВ. |
|
|
|
|
|
|
|
|
У |
||
|
|
|
|
|
4. |
Составить уравнения Fix 0 и Fiy 0 . |
|
||||||||||
|
|
|
|
|
5. |
|
|
|
|
|
|
|
|
Т |
|
||
|
|
|
|
|
Какое уравнение равновесия позволит определить |
||||||||||||
|
|
А |
|
|
|
хВ? Запишите его. |
|
Н |
|
|
|||||||
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|||
х |
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
3.4.4 Две однородные прямоугольные пл ты, сваренные под прямым углом |
|||||||||||||||||
друг к другу, крепиться и нагружаются таки, как показано на рисунке. |
|
|
|||||||||||||||
Рассмотреть равновесие к |
|
укции иответить на вопросы. |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
о |
1. |
Назвать реакции сферического под- |
||||||||
|
|
|
|
|
|
|
|
шипника А, цилиндрического под- |
|||||||||
|
|
|
|
|
нст |
|
|
||||||||||
|
|
|
|
|
|
2. |
шипника В и стержня CD. |
|
|
||||||||
|
|
|
|
и |
|
|
Какая система сил действует на кон- |
||||||||||
|
|
|
|
|
|
|
струкцию? Записать |
|
аналитическое |
||||||||
|
|
|
|
|
|
|
условие |
равновесия |
|
этой |
системы |
||||||
|
|
|
з |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
сил. |
|
|
|
|
|
|
|||
|
|
о |
|
|
|
|
|
3. |
|
уравнения Fiy 0 |
|
||||||
|
|
|
|
|
|
|
Составить |
и |
|||||||||
|
|
|
|
|
|
|
|
Fiz 0 . |
|
|
|
|
|
||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
4. Какое уравнение позволит опреде- |
||||||||||
е |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
лить реакцию стержня CD? Составь- |
|||||||||
|
|
|
|
|
|
|
|
те его. |
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
|
5. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Составить уравнение, |
позволяющее |
||||||||
|
|
|
|
|
|
|
|
6. |
определить yB . |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Определить момент силы Р относи- |
||||||||
|
|
|
|
|
|
|
|
|
|
тельно оси Ау. |
|
|
|
|
|||
27
|
3.4.5. Две прямоугольные плиты, сваренные под прямым углом друг кдругу, |
||||||||||||||||||||||
крепятся и нагружаются так, как показано на рисунке. Рассмотреть равновесие |
|||||||||||||||||||||||
конструкции иответить на вопросы. |
|
|
|
1. |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
Назвать виды связей для кон- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
струкции. |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Показать на рисунке все ак- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тивные и реактивные силы, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
приложенные к конструкции. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Записать для полученной си- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
/2 |
|
|
|
|
|
|
|
|
|
|
|
стемы сил уравнения равнове- |
|||||
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Упозволит |
|||
|
|
|
|
а |
|
|
|
|
|
|
|
|
c |
|
|
|
сия. |
|
|||||
|
|
С |
|
/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Какое |
уравнение |
||||||
|
|
|
а |
|
|
|
|
|
|
|
b |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
определить усилие в невесо- |
|||
Р |
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
А |
у |
|
|
мом стержне CDТ? Составить |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
его. |
|
|
||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
Составить уравнение равнове- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
сия для определения xB . |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Составить уравнение равнове- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сия для определения zA . |
|||
|
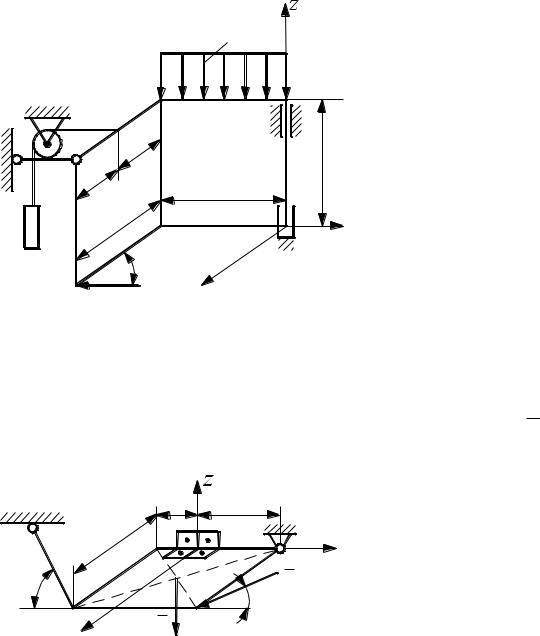
3.4.6 Рама удерживается в |
|
|
|
омйположении так, как показано на |
||||||||||||||||||
рисунке. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1. |
Дано: G=5 кН; Q=10кН;а =5 м; b =2 |
м; с =4м; CD BX ; Q BZ . |
|||||||||||||||||||||
Указать объект равновесия и виды связей. |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
горизонтальн |
2. |
Изобразить на рисунке все си- |
||||||
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
со |
|
|
|
лы, приложенные к объекту |
|||||
|
D |
|
|
|
а |
|
|
|
|
|
|
тВ |
|
у |
|
3. |
равновесия. |
|
|||||
|
|
|
|
|
|
|
|
|
и |
А |
|
|
Определить вид системы сил, |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
приложенной к объекту рав- |
||||||||||
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
60° |
|
|
|
|
з |
|
|
|
|
|
|
новесия. Записать аналитиче- |
||||||||||
|
|
|
|
|
|
|
|
45° |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ское уравнение равновесия для |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
С |
|
х |
|
|
G |
|
Е |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
этой системы сил. |
|
|||||||||
4. |
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
уравнение позволит рассчитать реакцию невесомого стержня CD? Со- |
|||||||||||||||||||||
|
ставить |
го. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Какое |
|
|
|
|
|
|
4. ЦЕНТРТЯЖЕСТИ ТЕЛ |
|
|
|||||||||||||
|
Координаты центра тяжести тела определяются по формулам |
|
|||||||||||||||||||||
Р |
|
|
|
|
|
|
|
xi Gi |
|
yC |
yi Gi |
|
|
|
zi Gi |
(21) |
|||||||
|
|
|
|
|
xC |
; |
; |
zC |
|||||||||||||||
|
|
|
|
|
|
G |
|
G |
G |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
где G – общий вес тела; xi , yi , zi – координаты точек приложения сил тяжести элементарных частей, на которые разбито тело; Gi – вес элементарной ча-
сти тела.
Если вес любой элементарной части выразить для объемного тела
Gi Vi , для площади – Gi Si , для линии Gi li , где , и – соответственно вес единицы объема, площади, длины линии, то получим общие
формулы для определения координат центров тяжести однородных объемов |
|||||||||||||||||||||||
xC xi Vi ; yC |
yi Vi |
|
|
zi Vi |
|
|
|
У |
|||||||||||||||
; zC |
; |
|
|
|
|
|
(22) |
||||||||||||||||
|
|
V |
|
|
|
|
V |
|
|
V |
|
|
|
|
|
|
|
|
|
|
|||
однородной площади |
xi Si |
|
|
yi Si |
|
|
zi Si |
|
|
|
|
|
|
|
|||||||||
|
|
xC |
; |
yC |
; zC |
Н |
|
|
|
(23) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
S |
|
S |
|
|
|
S |
|
|
Т |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
и однородной линии |
|
|
|
|
|
|
|
|
|
Б |
|
|
|||||||||||
|
|
xC |
xi li |
; yC |
yi li ; zC |
zi |
li . |
|
|
|
|
(24) |
|||||||||||
|
|
|
|
l |
|
|
|
l |
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
В этих формулах V Vi ; |
S Si ; l li – соответственно объем |
||||||||||||||||||||||
тела, площадь фигуры и длина линии. |
|
|
|
|
|
3 R |
от основания), конуса |
||||||||||||||||
ординат центров тяжести полуша а (на асстоянии |
|
||||||||||||||||||||||
Определение координат центров тяжести однородных тел по формулам |
|||||||||||||||||||||||
(22–24) сводится к вычислению определенных |
нтегралов по всему объему, |
||||||||||||||||||||||
(на расстоянии |
1 |
Н от основания),кругвого сектора (на расстоянии |
2 |
R sin |
|||||||||||||||||||
площади или линии. Таким способом полученыйформулы для определения ко- |
|||||||||||||||||||||||
|
|
|
|
т |
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
4 |
и |
о |
|
|
|
|
|
sin |
|
|
3 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
от центра круга) и дуги окружнос и (на расстоянии |
R |
|
|
|
от центра окружно- |
||||||||||||||||||
|
|
|
|||||||||||||||||||||
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
сти). Для всех этих объектов центр тяжести расположен на оси симметрии. |
|
|
|||||||||||||||||||||
то |
|
|
|
|
|
|
|
|
i |
|
i |
|
|
|
i |
|
|
|
|
|
|
||
Если объемн е тело, плоская фигура или линия имеют сложную геометри- |
|||||||||||||||||||||||
ческую форму, |
|
для определения координат центров тяжести применяются |
|||||||||||||||||||||
метод разбиения, мет д дополнения или метод отрицательных объемов, площа-
е |
и l следует понимать |
дей. В этом случае в формулах (16–18) под V , S |
соотв тств нно объем, площадь или длину линии отдельных элементов простой |
|||||
Р |
|
|
|
|
|
г ом тричпской формы (полушар, цилиндр, сектор, треугольник и т.д.), на ко- |
|||||
торые разбита сложная фигура; xi , yi и zi |
– координаты центров тяжести этих |
||||
элементов в выбранной системе координат. |
|
|
|
||
Координаты центра тяжести плоских фигур (пластин) можно определять |
|||||
также п о формулам |
|
|
|
|
|
xC |
S y |
; yC |
Sx |
, |
(25) |
|
|
||||
где S y xi Si ; Sx yi Si |
F |
F |
|
||
– статические моменты площади относитель- |
|||||
но осей координат. |
|
|
|
|
29 |
|
|
|
|
|
|
|
Вопросы и задачи |
|
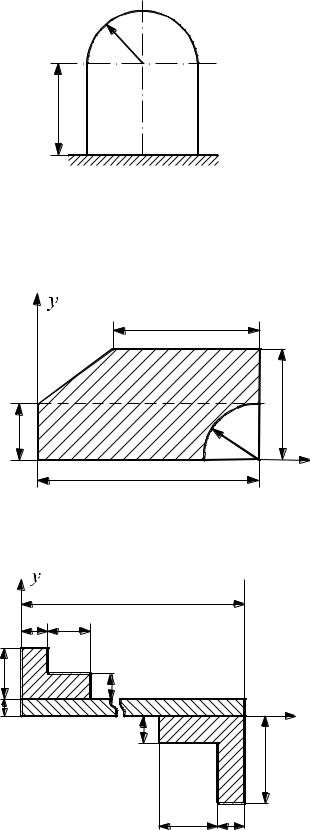
4.1 |
Однородное тело, состоящее из ци- |
|
R |
линдра высотой Н =28 см, |
радиусом |
|
R =40 см и полушара такого же радиуса, |
|
|
поставлено на горизонтальную |
плоскость |
цилиндрической частью.
2.Расстояние от плоскости до центра тяжести всего тела. ТУ
3.Будет ли оставаться тело в устойчивом положении равновесияН, если его поставить на плоскость сферической частью?
4.2От прямоугольной пластины размером 25 ×50Бсм отсечены треугольник и четверть круга. При указанных размерах для оставшейся части определить:Н
|
|
|
|
|
|
|
|
|
|
|
стины и на какие простейшие |
|
|
|
|
|
|
|
|
|
|
|
|
ф гуры при этом ее следует |
|
|
|
|
|
|
|
|
|
25 |
|
й |
|
|
|
|
|
|
|
|
|
R= |
|
разбить? |
|
||
12 |
|
|
|
|
|
|
2. Координаты центра |
тяжести |
||||
|
|
|
|
|
|
|
|
12 |
|
и |
|
|
|
|
|
|
50 |
|
|
|
|
|
х |
отсеченного треугольника. |
|
|
|
|
|
|
|
|
|
|
|
|
||
3. |
Координаты центра тяжес и |
|
р |
|
|
|||||||
сеченн го сектора. |
|
|||||||||||
4. |
Координаты центра тяжес |
овсей пластины. |
|
|||||||||
4.3 |
|
|
|
|
т |
|
|
|
|
|||
|
|
70 и |
|
|
|
Для изображения на чертеже по- |
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
перечного сечения сварной балки из |
||||||
|
|
|
|
з |
|
|
|
|
||||
|
5 |
25 |
|
|
|
|
|
однородных материалов определить: |
||||
|
|
|
о |
|
|
|
|
|
1. |
Статический момент площади от- |
||
20 |
|
|
|
|
|
|
|
2. |
носительно оси Oх. |
|
||
|
|
5 |
|
|
|
|
|
|
Статический момент площади от- |
|||
5 |
|
п |
|
|
|
|
|
|
|
носительно оси Оу. |
|
|
|
|
|
|
|
|
|
|
3. |
|
|||
|
е |
|
5 |
|
|
|
|
х |
Координаты центра тяжести всего |
|||
|
|
|
|
|
|
30 |
|
|
сечения. |
|
||
Р |
|
|
|
|
|
|
|
4. |
Чему равны статические моменты |
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
площади относительно осей, нача- |
|||
|
|
|
|
|
|
|
|
|
ло которых выбрано в центра тя- |
|||
|
|
|
|
|
15 |
5 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
жести сечения? |
|
|
Все размеры даны в сантиметрах. |
|
|
|
||||||||
30
|
4.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
R |
|
|
|
|
|
|
|
|
R |
20 |
|
5 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
20 |
|
|
|
|
|
|
20 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
30 |
|
|
20 |
х |
|
|
|
Из однородной проволоки, поперечным размером которой можно прене- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
бречь, изготовлено крепление. В выбранной системе координат определить: |
||||||||||||||||
1. |
Координаты центра тяжести первого участка (полуокружностиТ). |
|||||||||||||||
2. |
Координаты центра тяжести третьего участка (четверти окружности). |
|||||||||||||||
3. |
Координаты центра тяжести всего контура. |
|
Н |
|
||||||||||||
Размеры даны в сантиметрах. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Б |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
5. РАСЧЕТПЛОСКИХ ФЕРМ |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
Понят ео фе ме |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
Фермой называется конструкция, с - |
|
|
|
|
|
||||||||||
стоящая из стержней, которые |
|
|
уют |
|
|
|
|
|
||||||||
геометрически неизменяемую |
|
браз |
|
|
|
|
|
|||||||||
|
|
ему. |
|
|
|
|
|
|
||||||||
|
Места |
соединения |
двух или |
|
более |
|
|
|
|
|
||||||
стержней фермы |
|
|
|
о |
|
|
|
|
|
|
||||||
|
|
узлами. В при- |
|
|
|
|
|
|||||||||
|
|
|
|
|
сист |
|
|
|
|
|
|
|
||||
ближенных расчетах можно допустить, |
|
|
|
|
|
|||||||||||
что в узлах фермы находятся шарниры. |
|
|
|
|
|
|
||||||||||
|
|
|
|
и |
|
|
|
Простейшей |
плоской |
фермой |
является |
|||||
|
|
|
называют |
|
|
|
|
|||||||||
|
|
|
|
стержневой треугольник, содержащий три уз- |
||||||||||||
|
|
о |
|
|
|
ла. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Простая плоская |
ферма получается из |
|||||||
|
п |
|
|
|
|
простейшей путем последовательного присо- |
||||||||||
|
|
|
|
|
единения к ней каждого нового узла при по- |
|||||||||||
|
е |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
мощи двух новых стержней. |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначим число стержней n, а число узлов – m. Тогда количество стерж- |
|||||||||||||||
ней, добавленных к простейшей ферме, равно n – 3, а число добавленных узлов |
||||||||||||||||
Рm– 3. В соответствии с определением простой плоской фермы первое значение в |
||||||||||||||||
два раза больше второго, следовательно, n–3 = 2∙(т– 3) |
|
|
|
|||||||||||||
|
|
|
|
|
|
n 2m 3. |
|
|
|
|
|
|
||||
31
Полученное выражение, отражающее связь между числом стержней и узлов,
называют формулой простой плоской фермы.
Допущения, применяемыепри расчетеферм
При расчете сил, действующих на узлы ферм, обычно исходят из следующих
–внешние силы приложены только кузлам фермы; У
–веса стержней пренебрежимо малы (их можно учесть, разносяТпо узлам соответствующих стержней);
–трение в шарнирах отсутствует. Н либоДля каждого из узлов плоской фермы, посколькуБна них действуют системы
|
плоской |
сходящихся сил, могут быть составлены два уравнения равновесия. Поэтому их |
|
общее число 2m. В свою очередь в простой |
ферме неизвестными явля- |
ются n реакций стержней и три реакц внешн х связей. Таким образом, при |
|
числе стержней n =2m– 3 расчет сил может быть полностью выполнен методами |
|
статики. |
|
При n<2m– 3 конструкция становитсяигеометрически изменяемой. |
|
Если n >2m– 3, ферма статически неоп еделима. |
|
|
т |
Расчет ферм включает две задачир: пределение реакций внешних связей и |
|
вычисление сил реакций с ержней. Как правило, вначале вычисляются реакции |
|
|
и |
внешних связей. К основным меодамрасчета внутренних сил относятся способы |
|
|
з |
вырезания узлов и сечен й. |
|
о |
|
Определениевнутренних силфермыспособом вырезания узлов |
|
п |
|
Ферма м жет быть представлена как система тел – узлов, соединенных между |
|
уравнения |
|
собой связями – стержнями. Поэтому для ее расчета справедливы правила, изло- |
|
ж нные в разделе равновесие систем тел. Поскольку на каждыйузел действует си- |
|
Р |
|
ст ма сходящихся сил, то для него могут быть составлены только два независи- |
|
мых |
равновесия, из которых можно найти только две неизвестные си- |
лы. В связи с этим расчет следует начинать с того узла, к которому приложены только две неизвестные внутренние силы.
Рассматривая узлы в таком порядке, чтобы в каждом последующем было не более двух неизвестных сил, выполняем расчет всех реакций внутренних связей. Причем, следует учитывать, что в соответствии с аксиомой о действии и противодействии силы, которыми стержень действует на взаимодействующие с ним уз-
32

лы, равны по модулю и направлены в противоположные стороны. Для удобства будем обозначать их Si и Si .
Замечание. Для вычисления всех реакций стержней нет необходимости рассматривать все узлы. Последний узел может быть использован для проверки правильности решения.
Достоинство метода: он легко поддается программированию на ЭВМ. |
|
|
Недостаток: накопленная погрешность и ошибка на начальной стадии рас- |
||
чета ведет к необходимости повторного полного перерасчета. |
У |
|
|
|
|
Расчет простых плоскихферм способом сечений |
|
|
Н |
|
|
В качестве отдельного тела, составляющего ферму, может быть принята |
||
часть конструкции, включающая два узла и более. В этом случае внутренниеТ |
си- |
|
Б |
|
|
лы, действующие между частями системы тел, уже не будут сходиться в одной |
||
точке. Для такой системы сил можно составить три независимых уравнения рав- |
|||||
новесия, из которых будут определены три неизвестные силы. |
|||||
|
|
|
|
|
й |
Причем, для получения уравнения с одной неизвестной силой составляют |
|||||
|
|
|
еделить |
||
суммы моментов относительно точек пересечения линий действия двух других |
|||||
неизвестных реакций стержней. Если л н |
де ств я каких-либо двух сил парал- |
||||
|
|
р |
|
||
лельны, то составляется сумма проекц й с л на ось, перпендикулярную указан- |
|||||
ным линиям действия. |
од |
|
|
||
Достоинство метода: можно оп |
|
|
силу реакции конкретного стерж- |
||
ня, не рассчитывая другие внутренние силы. |
|
||||
|
т |
|
|
|
|
и |
определения внутренних сил |
||||
Граф ческ йме |
|||||
в стержнях прос ойплоскойфермы(метод Максвелла-Кремоны) |
|||||
значительно являетсяпграфическим вариантом рассмотренного ранее способа вырезания узлов
Выше представлены анал тические способы расчета реакций стержней
фермы. Однако при расчете ферм с большим количеством стержней их примене- |
|
ние требует |
збольших затрат, чем использование графического мето- |
да, заключающег ся в построении диаграммы Максвелла-Кремоны. Этот способ |
|
ющнейм. М сто, занимаемое фермой, разбивается стержнями фермы и приложенными к внешними силами на области (зоны). Каждая сила тогда находится
и состоит в остроении замкнутых силовых многоугольников для каждого узла ф рмы. Его особенностью является метод обозначения сил. Он состоит в следу-
Рна границе зон и обозначается буквами, соответствующими названиям пограничных областей.
Построение диаграммы выполняется в следующем порядке.
1.Изображается в масштабе ферма, показываются все внешние силы (в том числе и определенные ранее реакции связей) с учетом их действительных направлений так, чтобы их векторы выходили за контур фермы.
33
2.Буквами обозначаются области, ограниченные линиями действия внешних |
|||||||||||||
сил и стержнями контура фермы. |
|
|
|
|
|
|
|
|
|||||
3.Буквами обозначаются внутренние области, ограниченные стержнями |
|||||||||||||
фермы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
4.Строится силовой многоугольник внешних сил, приложенных к ферме. |
|||||||||||||
Записывается уравнение равновесия фермы в векторной форме: первое слагае- |
|||||||||||||
мое соответствует одной из внешних сил, последующие получаются при обходе |
|||||||||||||
наружного контура фермы, например, по ходу часовой стрелки. В масштабе |
|||||||||||||
изображаются все векторы сил. Их начала и концы обозначаются буквами, соот- |
|||||||||||||
ветствующими наименованиям зон. При правильном построении силовой мно- |
|||||||||||||
гоугольник внешних сил должен быть замкнутым. |
|
|
|
||||||||||
5.Выбирается узел, в котором имеется не более двух стержней, реакцииУко- |
|||||||||||||
торых неизвестны. Составляется уравнение его равновесия в векторной форме. |
|||||||||||||
Порядок следования векторов соответствует обходу узла в принятомТранее |
|||||||||||||
направлении. В соответствии с условием равновесия достраиваются недос- |
|||||||||||||
тающие стороны силового многоугольника. |
|
|
|
|
Н |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6.Выполняются построения, описанные в пункте 5, до того момента, пока |
|||||||||||||
не будут определены все искомые силы. Полученная в результате построения |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Б |
|
||
фигура носит название диаграммы Максвелла-Кремоны. |
|
|
|
||||||||||
Правильность ее построения проверяется по совпадению направлений ли- |
|||||||||||||
нии действия последней определяемой внутренней силы и соответствующего |
|||||||||||||
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
стержня при рассмотрении предпоследнего узла. |
|
|
|
||||||||||
7. Величины сил реакций сте жней опиеделяются путем измерения соответ- |
|||||||||||||
ствующих отрезков на диаграмме иумн жения на масштабный коэффициент. |
|||||||||||||
Чтобы определить, сжат либо |
|
|
рассматриваемый стержень, необхо- |
||||||||||
|
|
|
|
|
|
растянут |
|
|
|
|
|
||
димо проверить, куда направлен с тветствующий вектор силы. Если сила, |
|||||||||||||
действующая на узел, направленаотузла фермы – стержень растянут; иначе – |
|||||||||||||
сжат. |
|
|
|
т |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Вопросы и задачи |
|
|
|
|||||
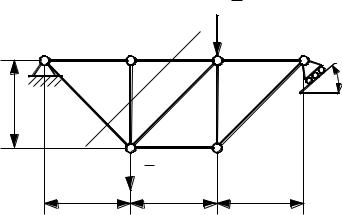
5.1 |
|
|
и |
|
|
|
|
|
|
|
|
||
Пл ская ферма нагружена и закреплена так, как изображено на рисунке. |
|||||||||||||
|
|
з |
|
|
|
|
|
Дано: |
P 6 кН, |
P 10 кН, |
|||
|
о I |
|
|
|
|
|
|
||||||
|
|
|
|
|
а =3м, b =4 |
1 |
2 |
||||||
|
|
Р1 |
|
|
м. |
|
|||||||
Ап6 С 5 |
|
D 4 |
|
В |
1. |
Назвать вид системы сил, при- |
|||||||
|
|
2. |
ложенной к ферме. |
|
|||||||||
а е1 |
|
|
|
|
|
30° |
Назвать типы связей в опорах А |
||||||
7 |
8 |
|
9 |
|
|
3. |
и В. |
|
|
|
|||
Р |
I |
|
|
3 |
|
Для сечения I–I определить точ- |
|||||||
|
|
|
|
|
|
4. |
ки Риттера. |
|
|||||
|
K Р |
2 |
|
Е |
|
|
Методом |
|
сечения |
вычислить |
|||
|
|
|
|
|
|
||||||||
|
а |
2 |
|
а |
|
|
|
|
значение усилия в 5 стержне. |
||||
|
|
b |
|
|
|
5. |
Методом вырезания узлов вы- |
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
числить усилие во 2 стержне. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
34 |
|
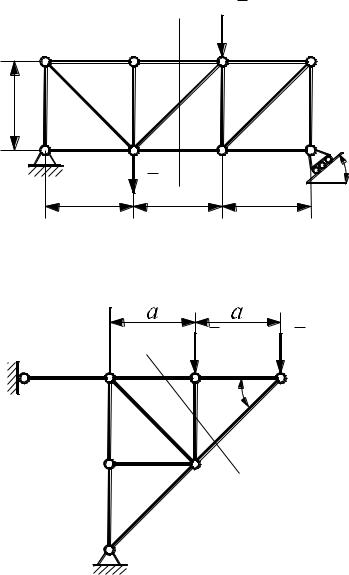
5.2 Плоская ферма нагружена и закреплена так, как изображено на рисунке. |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дано: P 20 кН, |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
Р1 |
|
|
P2 40 кН, а =1м. |
|
|
|
|||||
|
K |
7 |
|
|
Е |
|
|
|
6 |
|
|
D 5 |
С |
1. |
Назвать типы связей в А и В. |
|||||||||
|
|
|
|
|
|
|
|
|
Показать на чертеже реакции |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
9 |
|
|
|
|
|
|
|
|
12 |
|
|
2. |
связей. |
|
|
|
|
|||
а |
8 |
|
|
|
|
10 |
|
|
|
11 |
|
4 |
Определить является ли фер- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
13 |
|
ма статически определимой? |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
3. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определить |
точки |
Риттера |
|||||
А |
|
1 |
L |
|
|
2 |
I |
|
|
Н 3 |
|
45° |
4. |
для сечения I–I. |
|
У |
||||||||
|
|
|
а |
|
|
Р2 |
|
а |
|
|
|
а |
|
|
Методом сечения вычислить |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
значение |
усилия |
во |
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стержне. |
Т |
|
|||
5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Методом вырезания узлов вычислить усилие в 9 стержне. |
|
|
|
|
||||||||||||||||||||
|
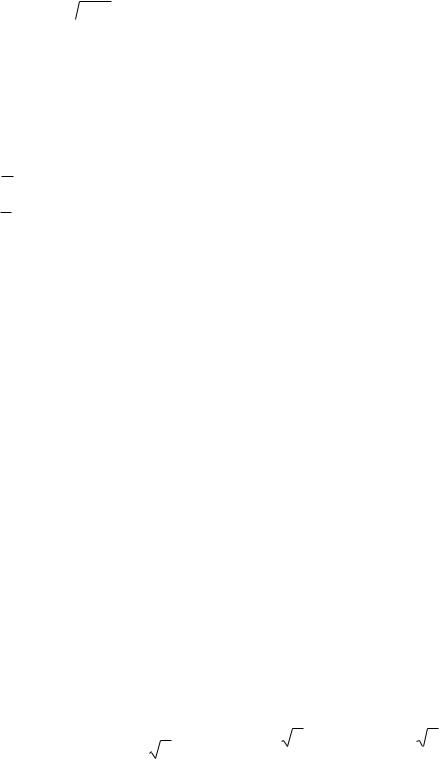
5.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P 20 |
кН, |
P 60 кН, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дано: |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р1 |
|
|
Р2 |
а =2м. |
|
Б |
|
|
|
|
||
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
С |
10 |
|
В |
|
|
|
L |
|
3 |
K |
1. Назвать типы связей в А и В. Пока- |
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
45° |
|
|
затьйна чертеже реакции связей. |
|
|||||
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
2. Найд те соотношения между коли- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
чествомузлов и стержней. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
3. Какие допущения принимают при |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
D |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
||||
|
|
|
|
7 |
|
|
|
Е |
|
|
о |
|
расчет фермы. |
|
|
|
|
|||||||
|
|
|
6 |
|
|
|
|
|
|
|
|
|
4. Для сечения I–I укажите точки Рит- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
1 |
|
т |
|
|
тера. |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
5. Определите усилие в 4 стержне ис- |
|||||||||||
|
|
|
А |
|
|
|
|
|
и |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
пользуя между сечений. |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35 |
ОТВЕТЫ НАВОПРОСЫ ЗАДАЧ
Пример2.2.1
1.F sin sin 45 a 1386 Н∙ см.
2.F sin sin 45 a .
3.F cos a  2 / 2 980 Н∙ см.
2 / 2 980 Н∙ см.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Пример2.2.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
||||||||
1. |
mx F1 F1 sin a 429 Н∙ см; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
mx F2 F2 cos a F2 sin |
803 Н∙ см. |
|
|
Б |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
2 |
|
|
|
|
|
0 .Н |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2. |
my |
F1 F1 sin |
a |
F1 cos a 429 Н∙ см; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
my |
F2 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
||||||||
3. |
mz |
F1 F1 cos a 215 |
Н∙ см; |
|
|
mz |
|
|
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
Пример2.2.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
По формулам(1)–(8): |
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
1. |
b F cos . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
2. |
a F cos . |
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
3. |
a F cos b F cos . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Пример2.2.4 |
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1. |
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
F1 sin AD F3 cos45 AA1 |
803 Н∙ см. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
2. |
F3 cos45 AA1 636 Н∙ см. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
3. |
F1 cos AD F3 cos45 |
AD 535 Н∙ см. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
4. |
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
F1 cos |
F2 cos |
F3 cos45 16 Н. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5. |
F3 cosп45 21 Н. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. |
F1 sin F2 sin 8 Н. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Пример2.2.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. |
Клюбому. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2. |
Нет. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
3. |
Главный вектор |
R |
|
|
|
; |
|
|
|
|
|
|
|
|
2 |
; |
|
|
|
|
|
|
|
|
2 ; |
|
|
|
|
|
. |
|||||||||||||
|
|
|
|
|
|
|
F 2 |
|
cos R ; |
i |
|
|
|
|
|
|
cos R ; |
|
j |
|
|
|
cos R ; k |
|
0 |
36 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
Главныймомент M A |
3a F ; cos M A, i |
2 |
; |
cos M A, |
j |
1 |
; |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
cos M A, |
k 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
MC aF |
|
5 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6. |
Нет, т.к. главныйвектор ≠ 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Пример2.2.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. |
Главный вектор |
R |
|
200 |
Н; |
cos R ; i |
|
2 |
; |
cos R ; |
|
j |
|
2 |
; |
|
cos |
R ; k |
|
0 |
. |
||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||||||
|
M x mx Fi 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
||||||||||
2. |
M z mz Fi F1 cos45 |
a 28,3 |
∙ м. |
|
|
||||||||||||||||||||||||||||
3. |
M A 28,3 Н∙ м, направлен вдоль оси z в сторону отрицательных значений. |
|
|
||||||||||||||||||||||||||||||
4. |
Да, т.к. Rx M x Ry M y Rz M z 0 (см. приложение к2.2). |
|
Т |
|
|
|
|||||||||||||||||||||||||||
|
Пример2.2.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|||||||||
1. |
Главный вектор R |
40 Н, направленот АкС. |
|
Б |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
2. |
M А mA Fi F3 AD m 620 Н∙ м; направлен по ходу стрелкичасов. |
||||||||||||||||||||||||||||||||
3. |
Силыможно заменить равнодействующей, тй.к. главный вектор |
R |
|
0 |
. |
|
|
|
|||||||||||||||||||||||||
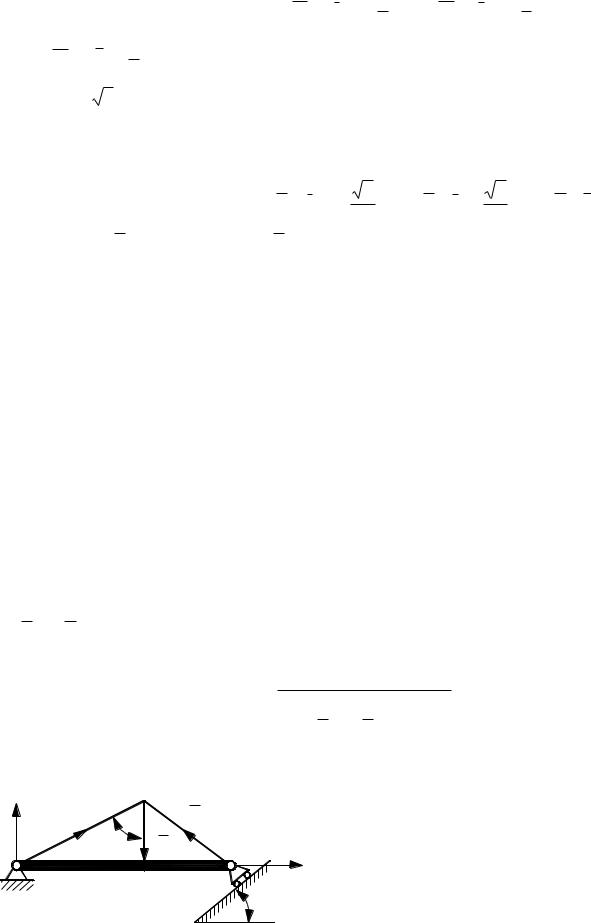
|
Пример3.1.1 |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1. |
Узел D. Реакция вдоль невес мых |
|
|
|
(см. 1.4.4). Их принято направлять |
||||||||||||||||||||||||||||
|
от узла. |
|
|
|
|
|
|
|
|
|
стержней |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2. |
Пространственная с с ема сходящихся сил. |
|
|
2 RAsin cos RC cos 0 ; |
|||||||||||||||||||||||||||||
3. |
Fix 0 |
, |
RA cos RB cos 0 ; |
Fiy |
0 , |
||||||||||||||||||||||||||||
|
Fiz 0 , |
|
|
|
|
|
т |
RC sin 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2RA sin cos Q |
При проектировании реакций |
|||||||||||||||||||||||||||||||
|
RA , RB |
на си ОуиOz необходимо вначале спроецировать их на плоскость |
|||||||||||||||||||||||||||||||
|
zOy, а затем– назс тветствующую ось. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
4. |
RC |
2RA sin cos |
|
; |
RA RB |
|
|
|
Q |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
о |
|
2sin sin cos tg |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Знак (–) указывает на то, что реакции RA и RB направлены кузлу. |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Пр |
|
|
3.1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
имер |
|
|
|
|
|
|
|
|
|
|
1. |
А – шарнирно-неподвижная опора, |
||||||||||||||||||||
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
RA |
|
|
|
|
|
RВ |
|
|
|
|
|
В – шарнирно-подвижная опора. |
|
|||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Теоремыо трех силах. |
|
|
|
|
|
|||||||||||||
|
А |
|
|
|
|
Р |
|
|
|
В |
|
х |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
3. Плоская система сходящихся сил |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fix 0 , |
Fiy 0 . |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P sin |
|
|
|
|
|
|
A |
|
|
|
|
|
|
P |
|
|
RB |
|
RB |
|
4 |
2 кН. |
|||||
|
|
|
|
|
|
|
|
|
sin |
|
|
sin |
|
|||||||||
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
5. |
Fix 0 ; |
RA sin RB sin 0; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Fiy 0; |
RA cos P RB cos 0 ; |
RB 4 2 |
кН. |
|
|
|
|||||||||||||||
|
Пример3.2.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||||
|
Q |
|
|
F |
|
1. |
Т-образную балку АВЕ. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
Е |
2. |
Равнодействующая F |
2 qmax 3кН3 . |
||||||||||||||
|
|
|
1м |
|
Прикладывается на расстоянии |
1 |
BE |
от qmax . |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
Р |
|
|
|
М |
|
3. |
|
|
|
|
|
|
|
|
|
|
|
Б3 |
|
|||
А |
|
|
Плоская про звольная система сил. Аналитическим |
|||||||||||||||||||
|
|
ХА |
|
условием |
|
|
|
|
я является: |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Fix 0; Fiy |
|
й |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
0 |
; mA Fi 0 . |
|
|||||||||||||
|
М YА |
|
|
|
4. mA Fi 0 |
и. |
|
|
|
|
|
M A 6 кН ∙ м. |
||||||||||
|
|
|
|
|
|
|
Q 1 P sin 4 M F 1 M A 0, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
равновес |
|
|
|
|
|
|
|
|||||
|
Пример3.2.3 |
|
|
о |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
ХА |
|
1. |
Раму. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
А |
|
|
|
иd a b ; |
yA 0 . |
|
|
|
|
|
|
||||||||||
|
d |
|
|
|
|
|
|
|
|
|
||||||||||||
YА |
|
|
з |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
Q q a b , т.к. все силы. |
|
|
|
|
||||||||||||
Q |
|
|
|
Р |
|
2. |
|
|
|
|
||||||||||||
|
|
|
|
3. |
Плоская система параллельных сил. Для определе- |
|||||||||||||||||
|
|
|
о |
|
|
ния X A и RB необходимо составить два уравнения |
||||||||||||||||
|
|
п |
|
|
|
|||||||||||||||||
|
|
|
|
|
равновесия. |
|
|
|
|
|
|
|
|
|
||||||||
|
е |
|
|
|
4. |
mA |
Fi 0 . |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
a b |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Р |
RВ |
|
|
|
Q |
P a RB a b c 0 . |
|
|||||||||||||||
С В |
|
|
2 |
|
|
|||||||||||||||||
|
|
|
|
|
Q a b 2Pa |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
RB |
|
2 a b c . |
|
|
|
|
|
|||||||
|
Знак “–” указывает на то, что реакция RB направлена в противоположном |
|||||||||||||||||||||
|
направлении, показанном на рисунке. |
|
|
|
|
|
|
|
|
|
|
|||||||||||
38
|
Пример3.2.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1. |
А – шарнирно-неподвижная опора; С– шарнирно-подвижная опора. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
2. |
Алгебраическиммоментом пары сил: М=М(Р, Р) =– Р. А=– |
60Н∙ м. |
|
|
|
|
|
|||||||||||||||||||||||||||||||
3. |
|
|
|
|
|
|
|
|
|
G1 |
|
|
4. |
Плоская произвольная система сил. |
|
|
|
|
||||||||||||||||||||
|
|
|
Q |
|
|
|
|
|
|
5. |
mA Fi Q AB |
G1 cos AB cos |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
90° |
|
|
|
|
|
Р1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G1 sin AB sin Pa YC ABcos 0 . |
|||||||||||||||||||||||||
|
|
YА |
|
|
|
|
|
|
|
|
|
YС |
|
|||||||||||||||||||||||||
|
|
|
ХА |
|
|
Р |
|
|
|
|
G1 |
G . |
|
|
|
|
|
|
|
|
|
|
|
У |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Пример3.2.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|||||||||||
1. Расчленение на части. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
Для стержня CD: |
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|||||||||||||||||||||
2. |
|
|
|
|
|
|
RD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
М |
|
|
D |
|
|
mA |
Fi |
0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
RD 2a 2 M 0 |
; |
Б |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
YС |
|
|
|
|
|
|
|
|
|
RD |
M . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2a |
2 |
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
ХС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
3. |
|
|
|
|
|
|
|
YС |
|
|
|
|
ДлячастиАСВ |
|
Q |
|
|
|
|
|
X |
|
|
|
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
0 |
, |
|
X |
A |
|
F cos60 |
|
|
|
; |
|||||||||||
|
|
|
|
|
XС |
|
|
|
|
|
|
ix |
|
|
|
|
|
1 |
|
|
C |
|
|
|||||||||||||||
|
|
|
|
|
С |
|
|
|
|
р |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
; |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
Y |
|
|
|
|
|
|
|
R |
|
|
|
0 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
F sin 60 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iy |
|
|
A |
|
1 |
|
|
B |
C |
|
|
|||||||||||||
|
|
|
|
|
Q |
|
|
|
F1 |
|
оmA |
Fi 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2a |
|||||||
|
|
|
|
|
1,75 |
|
|
|
|
|
т R |
4a F sin 60 |
2a Q 1,75a Y |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
1 |
|
, |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
||||
|
Y |
А |
ХА |
|
|
|
|
|
|
R |
|
X |
|
2,5 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
60° |
|
|
В |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
A |
|
|
|
|
|
|
и |
|
B где Q q 2,5a . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4. |
mD |
F cos60 4,5a F1 sin 60 2a (см. 1.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Прим р3.2.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1. |
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А – жесткая заделка. |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В – шарнирно-подвижная |
||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
RВ B |
|
|
|
|
|
|
|
|||||||||||||||||||
|
А |
Y |
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
опора. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Х |
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
39 |
2. |
|
|
|
|
YС |
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
C |
X |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RВ |
|
|
|
|
|
|
|
C |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
Y |
|
|
Y |
|
|
|
|
|
|
|||||
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8q |
|
|
|
|
|
C |
|
C |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
YА |
|
|
|
|
|
|
|
|
|
ХС |
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
ХА |
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
3. |
На АС: |
МА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На СВ: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Fix 0 , |
X A Q XC 0 ; |
|
|
|
|
mC Fi |
0, |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
Fiy |
0, |
YA YC 0 ; |
|
|
|
|
|
|
|
|
|
8q 4 R |
|
8 cos 0 ; |
|
|
|
||||||||||||||||||||||||
|
mA Fi 0 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
B |
Y |
|
|
|
|
|
Т |
; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
0 |
|
|
|
|
8q cos |
|
R |
0 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iy |
|
|
|
C |
|
|
B |
|
||||||||||||||||
|
|
M |
A |
P |
0,5 |
|
Q |
|
2 |
|
X |
C |
|
3 |
|
0 |
; |
|
|
F |
|
0 |
, |
|
|
X |
|
|
8q sin |
. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ix |
|
|
|
C |
|
|
|
|
|
||||||||||||||||||
4. Из mA Fi 0 RB |
8 кН. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|||||||||||||||||||||
5. |
Из уравнения mA Fi |
|
0 , составленного для конструкцииБв целом. При этом |
|||||||||||||||||||||||||||||||||||||||
|
внутренние силы в узле С не учитываются. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
M A 0,5P Q 2 8q4 cos2 8q sin 3 й4sin RB 8cos 0 . |
|
|
|||||||||||||||||||||||||||||||||||||||
|
M A 36 |
3 кН∙ м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. |
Пример3.2.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
RА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
6qmax |
|
3qmax . |
|
|
|
|
|
||||||||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оВ |
Q |
|
2 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
XВ |
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a 3 CK 2 м. |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
а |
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
В точке А– гладкая плоскость; |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
в точке D– невесомый стержень; |
|
||||||||||||||||||||||
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
K в точке В– шарнирно-неподвижная |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
D |
RD |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
опора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2. |
|
|
п |
|
|
|
|
|
|
|
|
Следует расчленить систему тел по шарниру С и |
||||||||||||||||||||||||||||||
|
|
|
|
А |
RА |
|
|
|
|
|
|
|
|
приложить к стержню АС силы так, как показано на |
||||||||||||||||||||||||||||
|
е |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
М |
|
|
|
|
|
|
|
рисунке. На стержень действует плоская произволь- |
||||||||||||||||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
ная система сил: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
mC Fi |
RA 4 M 0; |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fix |
RA XC 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
ХС |
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fiy YC 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
3. Следует рассмотреть равновесие всей конструкции |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
mC Fi |
0; |
|
RA 2 M Q 4 RD 4 0. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
1. |
Пример3.2.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Внешние и внутренние, активные и реактивные. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
2. |
|
|
|
|
|
|
Q |
|
|
|
М |
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
У |
||||
|
|
|
|
2м |
|
С |
|
|
|
|
|
D |
|
|
В |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Е |
|
|
R ED |
|
|
|
|
|
|
|
|
|
|
|
|||
|
МА |
YА |
ХА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
||
Необходимо расчленить конструкцию по шарнируС. Для стержня ВС |
|
||||||||||||||||||||||||||
4 |
mC Fi |
0; |
|
M RED sin 3 P1 |
6 0. |
|
|
|
Н |
|
|
||||||||||||||||
|
|
YС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Следует рассмотреть равновесие |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
стержня ВС. |
|
|
|
|
|
|
||||
|
ХС |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
М |
|
|
|
|
|
|
|
|
х |
|
|
|
Б |
M P 3 |
0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mD Fi YC 3 |
||||||||||
|
|
|
С |
|
|
|
|
D |
|
|
|
В |
|
|
Fix |
XC RED cos 0 . |
|
||||||||||
|
|
|
|
Е |
|
R ED |
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|||||||
5. |
Для всей конструкции mA Fi 0 ; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
M A Q 2 M RED sin 7 RED cos 4 P 10 0 . |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
||
1. |
Пример3.2.9 |
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
y |
|
|
|||||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
А – шарнирно-неподвижнаяАопора; |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
С– скользящая заделка. |
|
А |
|
|
|||||||||||
|
х |
|
|
|
|
|
|
|
3м |
|
|
|
хВ |
4м |
|
хА |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
30° |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
зМ |
|
|
|
|
|
|
|
|
yВ |
|
|
|
|
|
|
|
|
||||
2. |
|
|
|
о |
|
С |
|
|
|
|
|
6м В |
|
6м |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
||||
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
хА |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
yА |
|
|
|
|
yВ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
еР |
|
|
|
|
|
|
|
|
|
|
|
|
4м |
|
|
|
Q |
|
|
|
С6м |
|
|
|||
|
|
|
|
|
|
|
хА |
|
А |
|
|
|
|
|
|
|
R |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|||||||||
3м |
|
|
|
|
|
4м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Р |
30° |
|
хВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
yВ |
|
6м |
|
|
|
|
|
|
|
|
|
|
|
|
6м |
МС |
|
|
|
|
|||||
|
6м В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
хА |
В |
12 кН. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Q q b 3 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
yВ |
|
|
|
|
|
6м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
4м |
|
|
Q |
|
|
RС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
41 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6м МС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3. |
Fix 0, |
|
P cos30 xB xA 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
Fiy 0, |
|
P sin 30 yB yA 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
MC Fix 0, P sin 30 9 P cos30 4 yB 6 xB 4 M 0 ; |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
Fix 0, xB Q 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Fiy 0, yB RC 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|||||||||||||||||||
|
|
|
MC Fix 0, xB 6 yB 4 Q 2 MC 0. |
|
|
|
|
|
||||||||||||||||||||||||||||||||
4. Находимусилие в промежуточномшарнире В хВ = 12 кН; |
уВ =17,77 кН. |
|||||||||||||||||||||||||||||||||||||||
|
|
Находим давление в опорах А иС хА =3,58 кН; |
уА =– 8,77 |
|
Т |
|||||||||||||||||||||||||||||||||||
|
|
кН; |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
RC =17,77 |
кН; |
МС |
=– 154,64кН∙ м. |
|
|
|
|
Н |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1. |
|
|
Пример3.3.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
RB плоскости стены. |
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
||||||||||||||||||
2. |
|
Из уравнения mA |
|
|
|
RBl sin G |
l |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
cos 0 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
Fi |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
RB |
Gctg |
. |
|
|
|
|
|
RВ |
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Дополнительно к предыдущему уравне- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
NА |
|
|
|
|
|
|
|
т |
|
нию составим |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рFix N A G 0 N A G ; |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
R F max 0 R |
F max fG |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iy |
B |
сц |
B |
|
|
сц |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
ctg fG ctg 2 f arcctg2 f . |
|||||||||||||||||||
|
|
|
|
|
|
|
лько |
|
|
|
|
|
max |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
F |
|
|
|
|
2 |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
сц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
4. Невозможно, т.к. в этом случае в т. А |
|||||||||||||||||||||
|
у |
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B 0 . Поэтому две силы |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
т |
|
|
|
|
с ставляющая |
N |
A |
и |
R |
N |
A и |
G |
не мо- |
|||||||||||||||||||||
|
|
будет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
гут уравновесить друг друга, т.к. не лежат на одной прямой. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Рсц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Прим р3.3.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1. |
|
Fiy N P sin G cos 0 N G cos P sin . |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
2. |
|
F fN f G cos P sin . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
3. |
При Pmax наибольшая сила трения покоя направлена вниз. Из уравнения рав- |
|||||||||||||||||||||||||||||||||||||||
|
|
новесия Fix |
Pmax cos Fсц G sin 0 или |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
42
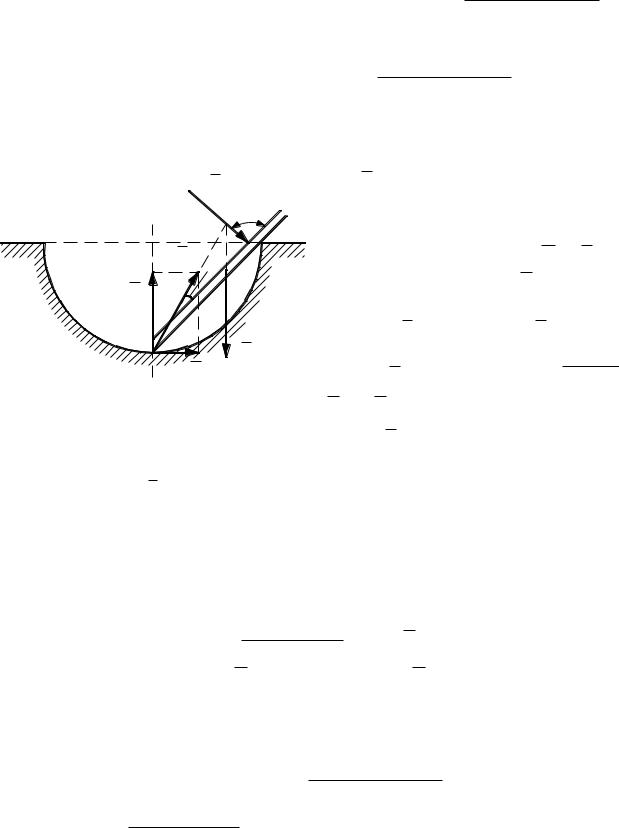
|
Pmax cos f G cos Pmax sin G sin 0 Pmax G sin f cos . |
||||||||||||||||||||||||||||||||||
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos f sin |
||
При Pmin наибольшая сила трения покоя направлена вверх. Тогда из |
|||||||||||||||||||||||||||||||||||
|
Fix |
Pmin cos Fсц G sin 0 Pmin G sin f cos . |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos f sin |
|
|
||||||
|
Пример3.3.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RВ |
|
|
|
|
|
1. |
|
RB AB (см. 1.4.1). |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
|
На основании теоремы о равнове- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90° |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сии 3-х сил RА |
проходитУчерез |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
RА |
|
|
В |
|
|
|
|
точку пересечения силТG и RB . |
||||||||||||||
|
|
|
|
|
|
NА |
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
|
Из уравнения mВ Fi 0 ; |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
3 l cos45 N |
|
f 3 l sin 45 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
A |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
Н |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
G |
|||
4. |
|
|
|
|
|
|
|
|
|
|
А |
Fсц |
|
|
|
|
|
|
|
|
|
G 4 l sinБ45 0 N A 3 1 f . |
|||||||||||||
Угол сцепления сц |
– это угол между N A |
|
RА |
|
в предельном положении по- |
||||||||||||||||||||||||||||||
|
коя. Тогда |
|
|
45 |
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
||||||||||||||
|
сц |
|
, где – угол между R |
А |
и стержнем. |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|||||||
|
tg KB / AB |
1 |
18 |
24 ; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
3 |
|
f A tg сц tg26 36 0,5 . |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Пример3.3.4 |
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. |
Равновесие рычага ОА. |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
2. |
mВ |
Fi |
0. |
|
|
|
|
|
|
и |
P a |
b cos |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
3. |
N a |
|
P cos |
|
a |
|
b |
|
0 |
|
N |
|
, |
где |
|
N |
– |
|
реакция шкива, направ- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
з |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
вверх, ОА. Сила N равна по величине N |
и направлена ей противо- |
|||||||||||||||||||||||||||||||
|
положно. |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для |
|
|
деления Pmin |
составим сумму моментов приложенных к барабану |
|||||||||||||||||||||||||||||||
|
|
опр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
сил относительно оси вращения |
|
|
|
|
|
a b cos |
|
|
|
|||||||||||||||||||||||||
|
max |
|
|
|
|
|
|
|
|
|
|
|
max |
|
|
|
|
|
fP |
|
|
|
|
||||||||||||
|
ленная |
|
|
r |
0; |
Fсц |
|
|
|
fNmin |
|
min |
|
|
|
|
|
|
|
|
. |
|
|
||||||||||||
|
Fсц |
|
R G |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Gra |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Тогда Pmin fR a b cos . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43 |
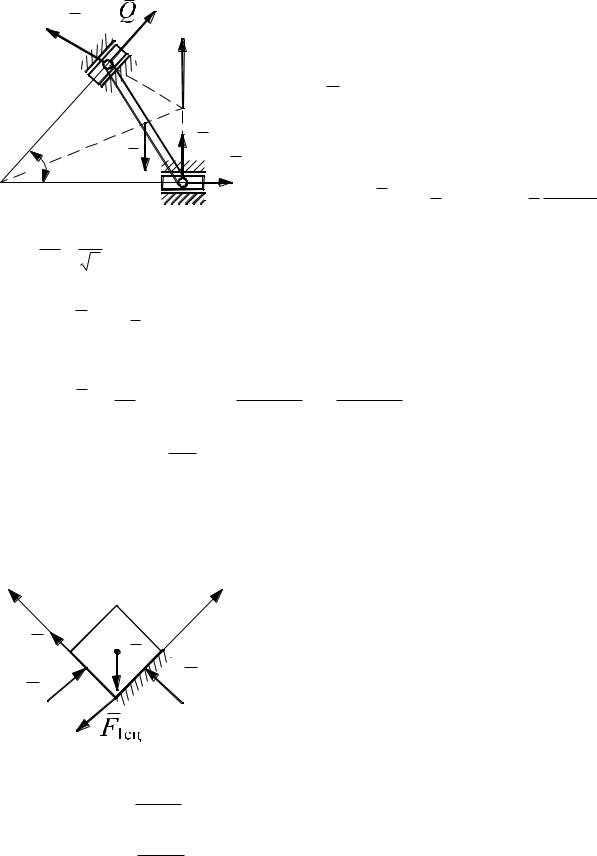
|
Пример 3.3.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
NВ |
|
|
|
|
|
|
|
|
|
1. |
Сила трения направлена в противопо- |
||||||||||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
ложную сторону движения ползуна, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
которое |
|
определяется |
|
направлением |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вращения стрежня под действием сил |
|||||||||||||
|
|
|
|
|
|
|
О |
|
|
|
|
|
|
Q и G . Для определения этого соста- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
вим сумму моментов этих сил относи- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
NА |
|
|
|
|
|
тельно точки пересечения нормальных |
||||||||||||||
60° |
|
G |
|
|
|
Fсц |
|
|
|
реакций. |
|
|
|
|
|
|
|
|
1У |
||||||||
|
|
|
|
|
|
|
|
|
mО Fi |
G |
l |
|
|
|
l |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 30 Q |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 cos30 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Gl |
Ql |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
||
|
0 вращение – по часовой стрелке, а движение ползуна – вле- |
||||||||||||||||||||||||||
|
4 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|||
|
во. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
mА Fi G l sin 30 NBl sin 30 Ql cos30 0 NB |
14,6 Н. |
|
|
|||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
||||
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Fiy N A Q cos30 NB sin 30 0 N A 15,4 |
Н. |
|
|
|
|
|
|||||||||||||||||||||
4. |
mO Fi Gl sin 30 Fсц |
|
|
|
|
Q |
|
й |
|
|
|
|
|
|
|||||||||||||
|
|
l |
|
|
l |
|
0 . |
|
|
|
|
|
|
||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 cos30 |
|
|
2 cos30 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
||||
|
Fсц 2,7 Н; |
f |
Fсц 0,18 . |
|
р |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
N A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Пример 3.3.6 |
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Для определения N1 и N2 рассмотрим рав- |
|||||||||||||||||||
|
|
|
|
з |
|
|
|
|
|||||||||||||||||||
y |
|
|
|
х |
|
|
новесие крайнего кубика: |
0 ; |
|
|
|
|
|||||||||||||||
|
|
|
|
|
Fix |
N2 |
F1сц G cos45 |
|
|
|
|
||||||||||||||||
|
F2сц |
о |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
Fiy |
|
|
|
|
|
|
|
|
|
|
0 ; |
|
|
|
|
||||||
|
G |
|
|
|
|
|
|
N1 F2сц G cos45 |
|
|
|
|
|||||||||||||||
|
N2 |
п |
|
|
N1 |
|
|
|
F1сц fN1 ; |
|
F2сц fN2 . Тогда |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
N2 fN1 |
G cos45 |
0; |
|
|
|
|
(1) |
||||||||||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
N1 fN2 |
G cos45 |
0 . |
|
|
|
|
(2) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Решив совместно (1) и (2), получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Р |
|
|
1 |
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1. |
N1 G cos45 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 f 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. |
N2 G cos45 |
1 f . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 f 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
44 |
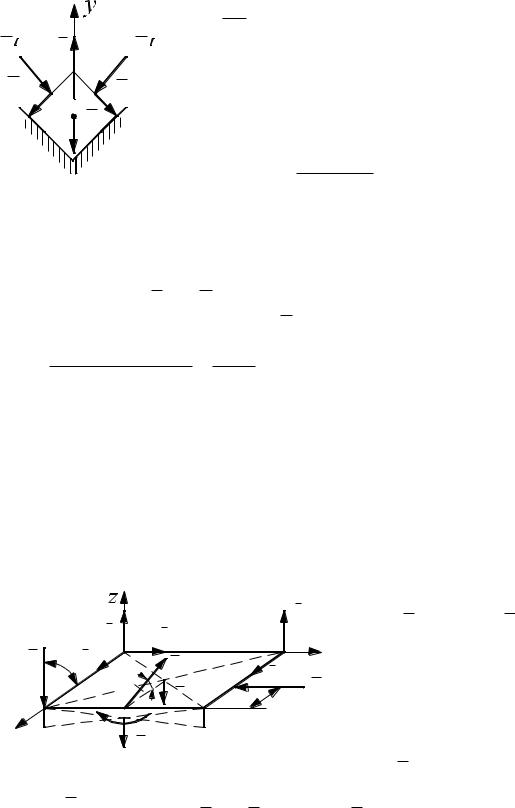
|
|
|
|
|
|
|
|
|
|
3. |
N1 |
1,5 . |
|
|
|
|
|
|
|
|
||||
N2 |
Р |
|
|
|
N1 |
|
4. |
N2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Давление кубика на плоскости в момент подъема |
||||||||||||||||||||
F1сц |
|
|
F |
|
|
|
|
|
отсутствует, т.е. между кубиком и плоскостями нет |
|||||||||||||||
|
|
|
|
|
|
|
никаких сил. Из уравнения Fiy 0 |
|
||||||||||||||||
|
|
|
G |
|
2сц |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
P G 2N cos45 2N f cos45 0 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
P 26 |
1 f f 2 . |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 f 2 |
|
|
|
|||
|
Пример 3.3.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||||||||
|
Значение сил |
P |
и |
N |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
найдем из решения уравнений равновесия катка |
|||||||||||||||||||||||
Fiy P cos30 r N 0; mK |
Fi |
P cos30 r N 0 . |
|
|
||||||||||||||||||||
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
P |
|
|
G |
|
|
|
|
500 |
1093 Н. |
|
|
|
Б |
|
|
|||||||||
2. |
|
r cos30 |
sin 30 |
|
|
0,458 |
|
|
|
|
|
|
|
|
|
|||||||||
N G P sin 30 |
10000 1093 0,5 9453,5 Н. |
|
|
|||||||||||||||||||||
3. |
Fсцmax fN 0,2 9453,5 1891 Н. |
|
|
|
|
й |
|
|
||||||||||||||||
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Так как P cos30 |
1093 0,866 Fсцmax , то скольжение будет отсутствовать. |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|||
|
Пример 3.4.1 |
|
|
|
|
|
о |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
1 |
1 |
|
|||
|
|
|
|
|
|
|
|
уи |
|
|
|
|
|
|
1. |
|
|
|||||||
|
|
|
|
zА |
А |
|
|
|
zВ |
|
F |
2 qmax BC |
2 qa. |
|
||||||||||
|
Q |
|
хА |
|
|
А |
|
|
|
|
|
|
В |
|
2. |
Конструкция из двух плит. |
||||||||
|
|
|
з |
|
|
|
|
|
|
у |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
хВ |
|
|
3. |
См. рисунок. |
|
|
||||
|
|
45° |
|
|
30° |
|
Р |
|
|
|
|
|
a/3 F |
4. |
my Fi 0 ; |
|
|
|||||||
|
|
|
|
о |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q sin 45 a T sin 30 a |
|
|||||||
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
х |
п |
Р2 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|||||||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 2 P2 a 0 . |
|
|
|||
|
|
|
|
zB b P1 b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
5. |
my Fi 0 |
; |
|
P2 |
b T sin 30 b |
M 0 . |
|
|
||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
45 |
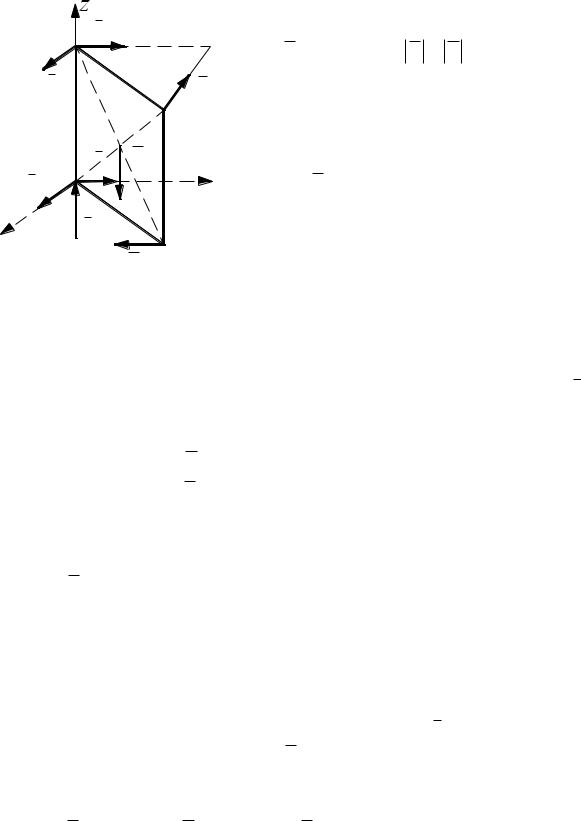
|
Пример 3.4.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
А yА |
|
|
|
|
|
|
|
1. |
Дверь. |
|
|
|
|
|
||
|
|
|
|
|
|
|
D |
|
2. |
Подпятник В, подшипник А, веревка EF. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
3. |
P1 – вдоль CD. P1 P . |
|
|
||||
|
хА |
|
|
|
|
|
Р1 |
|
Пространственная |
система |
произвольно |
|||||||
|
|
|
|
|
|
|
|
расположенных сил. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
С |
|
|
4. mz Fi 0 ; |
|
|
|
|
|
|||
|
|
|
yВ |
Q |
|
|
|
|
|
|
|
P1 AC cos30 T BE cos30 0 ; |
T P . |
|||||
|
х В |
|
|
|
|
|
|
5. |
mx P1 P1 cos60 AB 44 кН ∙ м. |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
В |
|
|
|
|
|
|
у |
|
6. zi 0 , zB Q 0 , |
|
|
У |
|||||
х |
|
|
|
|
|
|
|
|
|
|
||||||||
|
zВ |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|||
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||
|
Пример 3.4.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Б |
|
|
||||||
1. |
Реакция подпятника имеет три составляющие: |
|
|
|||||||||||||||
xA, |
yA |
и zA . Реакция цилин- |
||||||||||||||||
|
дрического подшипника раскладывается на две составляющие: xB и yB . |
|||||||||||||||||
2. |
Под действием пространственной |
звольноййсистемы сил. |
|
|
||||||||||||||
3. Fix 0 ; |
mx |
Fi 0; |
|
|
и |
|
|
|
|
|
||||||||
|
Fiy 0; |
my |
Fi 0 ; |
|
|
|
|
|
|
|
||||||||
|
|
про |
|
|
|
|
|
|||||||||||
|
Fiz |
0 ; |
mz |
Fi 0 ; |
|
|
|
|
|
|
||||||||
4. |
Fix |
0 ; |
xA xB T cos30 0 |
; |
|
|
|
|
|
|||||||||
|
|
0; |
|
|
|
|
|
|
о |
|
|
|
|
|
|
|||
|
F |
y |
A |
P y t T cos60 0 . |
|
|
|
|
|
|||||||||
|
iy |
|
|
|
|
|
|
тB |
|
|
|
|
|
|
|
|||
5. |
my Fi 0 ; |
xB |
a b T cos30 a b c QR sin 45 0 . |
|
|
|||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
||||
|
Пример 3.4.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1. |
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Опорная р акция в сферическом подшипнике разлагается на три составляю- |
||||||||||||||||||
|
щие поосям координат: xA, |
yA и zA . Реакция цилиндрического подшипни- |
||||||||||||||||
|
ка раскладывается на две составляющие: xB |
и |
yB . |
Реакция невесомого |
||||||||||||||
|
стержнянаправлена по стержню RCD . |
|
|
|
|
|
||||||||||||
2. Пространственная произвольная система сил. |
|
|
|
|
|
|||||||||||||
РFix |
0 |
; Fiy 0 |
; Fiz 0 ; |
|
|
|
|
|
|
|
||||||||
|
mx |
Fi 0; |
my Fi 0 ; |
mz Fi 0 . |
|
|
|
|
|
|||||||||
3. |
Fiy |
0; |
yB yA P cos q a RCD cos 0 ; |
|
|
|
||||||||||||
|
Fiz |
0 ; |
zB zA G Pcos RCD sin 0 . |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
46 |
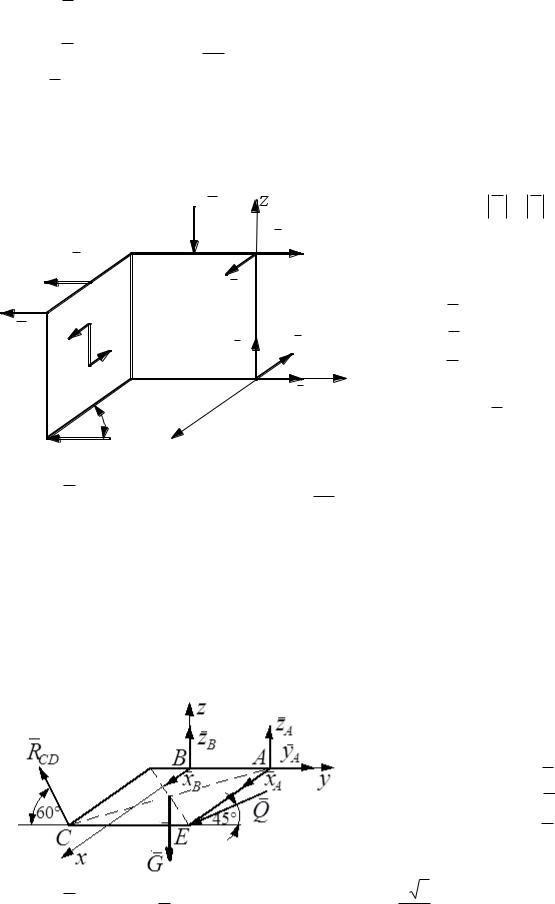
4. |
mx Fi 0; |
RCD cos b sin c q a b Pcos b 0 . |
|
|
||||||||||||||||
5. |
mz Fi 0 ; |
yB |
a q a2 M P cos a 0 . |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
6. |
M y P P cos b P sin a . |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Пример 3.4.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. В – цилиндрический шарнир; А – подпятник; DC – невесомый стержень. |
||||||||||||||||||||
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
2. G q B ; |
P1 P ; |
У |
||||
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
Fix 0 ; |
|
|
|||
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
Fiy 0 ; |
|
|
||||
|
|
Р1 |
|
|
|
|
|
|
B |
|
|
|
|
|
Т |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Fiz 0 ; |
|
|||||||
|
|
|
|
|
|
|
|
хВ |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
Fi 0 ; |
|
|
||
|
RС |
|
|
М |
|
|
|
z |
|
хА |
|
|
|
|
m |
F 0 ; |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
y |
i Н |
|
||||||
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
mz |
Fi 0 ; |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
А |
|
y |
у |
|
|
Б |
Q sin a |
||||
|
|
|
|
|
|
|
|
|
А |
|
R |
a P a |
||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
C |
|
1 2 |
|
|
||
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
йQ cos b 0. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
4. my Fi 0 ; |
|
c M 0 ; xB |
|
и |
|
|
|
|
|
|
||||||||||
xB |
|
c . |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
||
|
Составляющая хВ имеет направление, противоположное показанному на чер- |
|||||||||||||||||||
|
теже. |
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|||
5. |
Fix 0 ; |
zA G |
0 ; zA |
|
|
|
|
|
|
|
|
|
||||||||
G . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример 3.4.6 |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1. |
Рама AECF. Связямиявляются: петля в т. В, сферический шарнир в т. А и |
|||||||||||||||||||
|
невесомый стержень CD. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2. |
|
|
о |
|
|
|
|
|
|
|
3. |
Пространственная |
система |
|||||||
|
|
п |
|
|
|
|
|
|
|
|
|
|
произвольно расположенных |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
сил. |
|
|
|
|
||||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
mx Fi 0 ; |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fix 0 ; |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fiy 0 ; |
my Fi 0 ; |
||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fiz 0 ; |
mz Fi |
0 ; |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4. |
my Fi 0 ; |
G a |
RCD sin 60 a 0 ; |
RCD |
5 |
3 |
кН. |
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
47 |
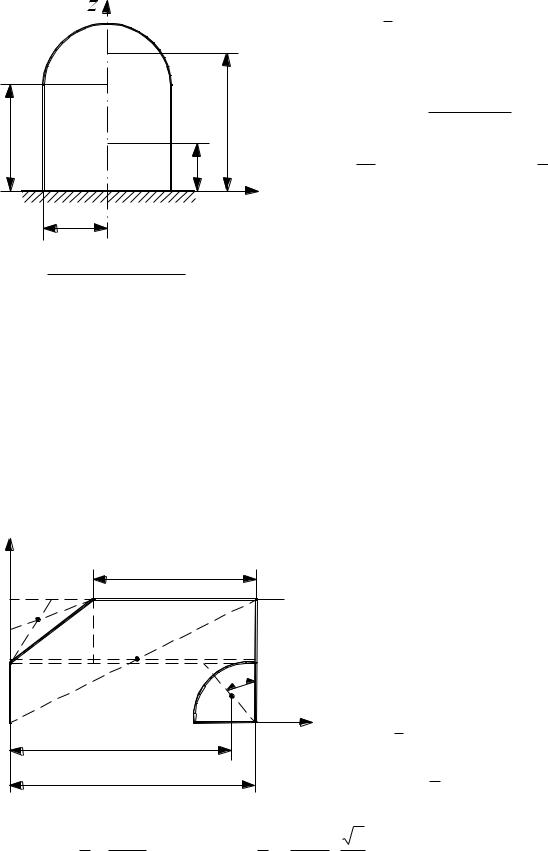
Пример4.1
1. z1 H 83 R 43 см.
2. Разобьем все тело на полушар (1) и цилиндр (2):
zC ziVi z1V1 z2V2 ;
3.Будет, т.к. центр тяжести всего тела лежит внутриБполушараНТzCУH . В этом случае нормальная реакция плоскости, проходящая через центр основания полушара, и сила тяжести тела будутйвозвращать тело, если его вывести из вертикального положения, в этоиположение.р V V Vz
|
полним фигуру четвертью круга (3) и т еугольником (2), считая дополнен- |
|||||||||||||
|
ные площади отрица ельными. Т гда фигуру можно представить состоящей |
|||||||||||||
|
из прямоугольника (1) |
указанных |
|
трицательных площадей. |
||||||||||
|
y |
|
|
|
|
|
|
о |
|
|
Второй способ: дополним фигуру |
|||
|
|
|
|
|
|
32т |
|
|
|
только четвертью круга и разобь- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
ем на два прямоугольника (а) и |
||
|
С2 |
|
|
|
(а) |
|
а |
|
|
|
|
(b), |
треугольник (с) и четверть |
|
|
|
|
|
|
|
и |
|
|
|
|
круга (d). |
|||
|
|
(с) |
|
|
з |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2. Центр тяжести отсеченного тре- |
|||||
|
|
|
|
|
С1 |
|
|
|
|
|
||||
|
|
|
о |
|
С3 |
|
|
|
|
угольника (2) находится на пере- |
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
b |
(b ) |
|
|
|
|
сечении медиан |
||||
О |
|
п |
|
(d) |
|
|
|
|
x2 |
1 |
18 6 см; |
|||
|
|
|
|
х |
|
|||||||||
|
|
|
|
|
|
|||||||||
|
е |
|
|
x3 |
|
|
|
|
3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
50 |
|
|
|
|
|
|
|
|
2 |
||
Р |
|
|
|
|
|
|
|
|
|
y2 12 3 13 20,67 см. |
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
2 R sin cos45 50 212 sin |
|
|
|
||||||||||
3. |
x3 50 |
4 |
2 44,9 см; |
|||||||||||
|
|
|
3 |
|
|
|
|
3 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
48 |
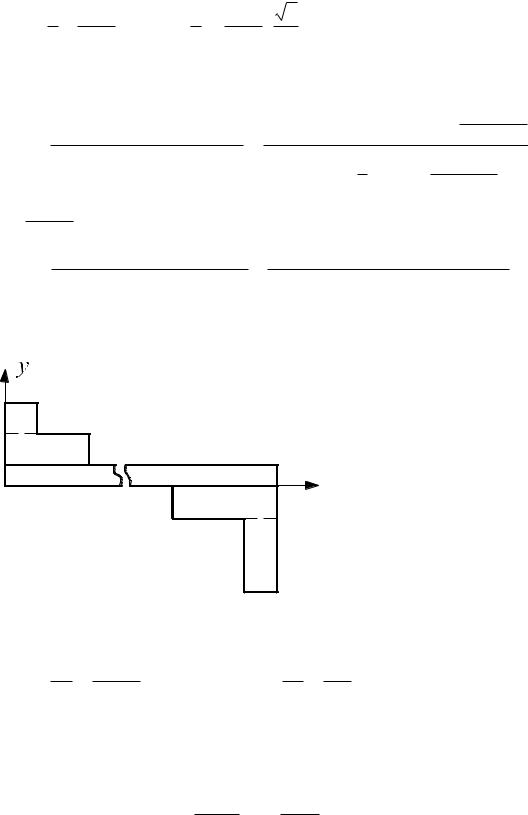
|
|
2 R sin cos45 212 sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
y |
4 |
|
|
2 |
5,1 см. |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
3 |
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Воспользуемся первымописанным способом: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
x F x F x |
|
F |
|
|
|
25 25 |
50 6 13 9 44,9 |
3,14 122 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
4 |
|
|
|
У |
|||||||||||||||||||||||||
|
x 1 1 |
|
|
2 |
|
2 |
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
C |
|
|
|
|
F1 |
F2 F3 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
3,14 122 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
25 50 |
18 13 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
4 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
25475 24,97 см; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
1020 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
y |
|
|
y1F1 y2 F2 y3 F3 |
|
|
12,5 1250 20,67 117 5,1 113 |
12,38 см. |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
C |
|
|
|
|
F1 |
F2 F3 |
|
|
|
|
|
|
|
|
|
1250 117 113 |
|
Т |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|||||||||||||||||||
|
Пример 4.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РазобьемБфигуру на пять прямо- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
угольн ков, как указано на рисунке |
|||||||||||
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
yi Fi y1 F1 y2 F2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S x |
|||||||||||||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|||||
О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
y3 F3 y4 F4 y5 F5 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
17,5 5 |
15 7,5 5 70 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,5 5 20 17,5 5 25 875 см3 . |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2. S y |
xi Fi |
x1F1 x2 F2 |
x3 F3 |
|
x4F4 |
x5F5 2,5 5 15 15 5 30 |
||||||||||||||||||||||||||||||
|
35 5 70 |
|
|
и |
|
5 25 29125 см3 . |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
60 5 |
20 67,5 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
S y |
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
Sx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3. |
xC |
|
|
|
|
29125 |
36,4 см; |
|
|
yC |
|
|
|
875 |
|
1,09 см. |
|
|
|
|
|
|||||||||||||||
|
|
F |
|
|
|
|
|
|
F |
800 |
|
|
|
|
|
|
||||||||||||||||||||
4. |
|
|
|
|
|
о800 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Статич ские моменты при таком выборе осей координат равны нулю. |
||||||||||||||||||||||||||||||||||||
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Прим р 4.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 1 |
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. |
x1 |
R 20 |
см; |
y1 |
R |
|
|
20 |
2 |
12,74 см. |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
49 |
|
x3 90 R sin 3 cos45 |
90 20 sin |
|
|
|
|
|
|
|
|
|||||||||
2. |
|
4 |
2 77,26 см; |
|
|
|
|||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
y R sin 3 cos45 20 sin |
|
|
|
|
|
|
|
|
|
|||||||||
|
4 |
2 12,74 см. |
|
|
|
|
|
||||||||||||
|
3 |
|
3 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
xC xili |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
||
3. |
x1l1 x2l2 x3l3 x4l4 x5l5 ; |
|
|
|
Т |
||||||||||||||
|
|
li |
|
|
l1 l2 l3 l4 l5 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Н |
У |
|||||||||
|
yC |
yili |
y1l1 y2l2 y3l3 y4l4 y5l5 . |
|
|
||||||||||||||
|
|
li |
|
|
l1 l2 l3 l4 l5 |
|
х3 =77,26см; х4 =100см; х5 =110 см; |
||||||||||||
|
Подставим х1 =20см; |
|
х2 |
=55 см; |
|
||||||||||||||
|
у1 =12,74 см; |
у2 =0; у3 =12,74см; |
|
у4 =20 см; у5 =10 см; |
|
|
|||||||||||||
|
l1 R 3,14 20 |
|
|
|
|
l2 =30 см; |
1 |
|
|
|
=20 см; |
||||||||
|
62,8 см; |
l3 2 |
R 31,4 |
см; l4 |
|||||||||||||||
|
l5 =20 см. |
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
и |
Б |
|
|
||||||
|
Получим: хС =58,05 см; |
уС =10,96 |
|
|
|
|
|
||||||||||||
|
см. |
|
|
|
|
|
|
||||||||||||
|
|
|
А |
|
|
|
|
|
|
|
шарни |
|
|
|
|
|
|||
|
Пример 5.1 |
|
|
|
|
о |
|
|
|
|
|
|
|
||||||
1. |
Плоская произвольная система сил. |
|
|
|
|
|
|
|
|
||||||||||
2. |
|
|
|
|
|
|
т |
А – |
|
|
рно-неподвижная опора |
|
|||||||
|
|
А |
|
|
|
RВ |
|
|
В – шарнирно-подвижная опора. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
|
|
60° |
|
|
|
|
|
|
|
|
|
|
|
3. |
А, С, K. |
|
|
|
и3 P1 4 RB cos60 |
|
|
|
|
|
|
||||||||
4. |
mK Fi 0 ; S5 |
7 RB sin 60 3 0 ; |
S5 32,5 кН. |
||||||||||||||||
5. |
S2 10 кН. |
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Пример |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
о5.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
п |
|
|
|
|
|
|
А – шарнирно-неподвижная опора |
|
|||||||||||
1. |
|
|
RВ |
|
|
|
|||||||||||||
|
|
|
А |
|
|
|
|
В – шарнирно-подвижная опора. |
|
||||||||||
|
|
А |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
|
|
45° |
|
|
|
|
|
|
|
|
|
|
|
2. |
S 2n 3; |
13 2 8 3. |
Статически определимая. Узлов – 8. Стержней – 13 |
||||||||||||||||
3. |
L, |
D. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
S2 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
S9 47,14 кН. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
50
1. |
Пример 5.3 |
|
|
А – шарнирно-неподвижная опора |
А |
|
|
||
|
RВ |
В |
В – невесомый шарнирно-закрепленный |
|
|
А |
|||
|
|
|
стержень. |
|
|
х |
|
|
|
2.S 2n 3; 9 2 6 3 . Узлов – 6. Стержней – 9.
3.Стержни невесомые, шарнирно закрепленные. Силы прикладывают к узлам.
4.Е, L, K. У
5.Fi 0; S4 a P2 a 0 ; S4 P2 60 кН. ТmЕ Н
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
51