

Физика-лекции
.pdfГосударственное образовательное учреждение высшего профессионального образования "Тольяттинский государственный университет"
Кафедра «Общая и теоретическая физика»
КУРС ЛЕКЦИЙ ПО ДИСЦИПЛИНЕ «ФИЗИКА»
ЧАСТЬ 1
для студентов технических специальностей
Составил:
доцент кафедры «Общая и теоретическая физика» ТГУ Сарафанова В.А.
Тольятти 2015
ОГЛАВЛЕНИЕ |
|
ВВЕДЕНИЕ |
4 |
§ 1. Предмет физики................................................................................................ |
4 |
§ 2. Методы физического исследования ............................................................... |
4 |
§ 3. Роль физики в развитии техники .................................................................... |
4 |
РАЗДЕЛ 1. ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ |
5 |
Глава 1.1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ ........................................ |
5 |
§ 1. Определения, модели кинематики ................................................................. |
5 |
§ 2. Способы описания движения тела ................................................................. |
5 |
§ 3. Скорость ............................................................................................................ |
6 |
§ 4. Ускорение и его составляющие ...................................................................... |
7 |
§ 5. Движение по окружности. Угловые характеристики ................................. |
10 |
§ 6. Виды движений .............................................................................................. |
13 |
Глава 1.2. ДИНАМИКА ЧАСТИЦ .......................................................................... |
14 |
§ 1. Первый закон Ньютона, инерциальные системы отсчета.......................... |
14 |
§ 2. Динамические величины ............................................................................... |
15 |
§ 3. Второй закон Ньютона................................................................................... |
15 |
§ 4. Третий закон Ньютона................................................................................... |
16 |
§ 5. Силы................................................................................................................. |
17 |
Глава 1.3. ЗАКОНЫ СОХРАНЕНИЯ ...................................................................... |
20 |
§ 1. Определения, понятия.................................................................................... |
20 |
§ 2. Закон сохранения импульса .......................................................................... |
20 |
§ 3. Центр масс системы ....................................................................................... |
21 |
§ 4. Работа и ее выражение через криволинейный интеграл ............................ |
22 |
§ 5. Энергия, виды энергии .................................................................................. |
24 |
§ 6. Кинетическая энергия и работа .................................................................... |
24 |
§ 7. Консервативные силы.................................................................................... |
25 |
§ 8. Потенциальная энергия и работа .................................................................. |
26 |
§ 9. Закон сохранения энергии............................................................................. |
27 |
Глава 1.4. МЕХАНИКА ТВЕРДОГО ТЕЛА........................................................... |
29 |
§ 1. Кинетическая энергия вращающегося тела................................................. |
29 |
§ 2. Момент инерции............................................................................................. |
29 |
§ 3. Момент силы................................................................................................... |
32 |
§ 4. Уравнение динамики вращательного движения ......................................... |
33 |
§ 5. Момент импульса ........................................................................................... |
33 |
§ 6. Закон сохранения момента импульса........................................................... |
34 |
Глава 1.5. ЭЛЕМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ... |
36 |
§ 1. Принцип относительности Галилея ............................................................. |
36 |
2
§ 2. Постулаты специальной теории относительности СТО ............................ |
37 |
§ 3. Преобразования Лоренца .............................................................................. |
37 |
§ 4. Следствия из преобразований Лоренца ....................................................... |
39 |
§ 5. Основной закон релятивистской динамики материальной точки............. |
41 |
§ 6. Закон взаимосвязи массы и энергии ............................................................ |
42 |
РАЗДЕЛ 2. ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ И ТЕРМОДИНАМИКИ |
44 |
Глава 2.1. МОЛЕКУЛЯРНО-КИНЕТИЧЕСКАЯ ТЕОРИЯ .................................. |
44 |
§ 1. Два метода исследования физических явлений .......................................... |
44 |
§2. Состояние термодинамической системы, параметры, процессы............... |
44 |
§ 3. Понятия, модели, положения молекулярно-кинетической теории........... |
45 |
§ 4. Уравнение состояния идеального газа ......................................................... |
46 |
§ 5. Опытные законы идеального газа ................................................................ |
47 |
§ 6. Основное уравнение молекулярно-кинетической теории ......................... |
49 |
§ 7. Средняя кинетическая энергия молекул идеального газа.......................... |
50 |
§ 8. Закон Максвелла для распределения молекул ИГ по скоростям .............. |
51 |
§ 9. Барометрическая формула............................................................................. |
53 |
§ 10. Распределение Больцмана ........................................................................... |
53 |
§ 11. Средняя длина свободного пробега молекул ............................................ |
54 |
Глава 2.2. ОСНОВЫ ТЕРМОДИНАМИКИ............................................................ |
56 |
§ 1. Внутренняя энергия и способы ее изменения ............................................. |
56 |
§ 2. Работа газа....................................................................................................... |
57 |
§ 3. Первое начало термодинамики ..................................................................... |
58 |
§ 4. Теплоемкость .................................................................................................. |
59 |
§ 5. Адиабатический процесс ............................................................................... |
61 |
§ 6. Работа при адиабатическом расширении .................................................... |
62 |
§ 7. Тепловые двигатели, КПД............................................................................. |
63 |
§ 8. Цикл Карно ..................................................................................................... |
64 |
§ 9. Энтропия ......................................................................................................... |
66 |
3
ВВЕДЕНИЕ
§ 1. Предмет физики
Физика - это наука, изучающая простейшие и вместе с тем наиболее общие закономерности явлений природы, свойства и строение материи, и законы ее движения.
В переводе с греческого «физика» - наука о природе. Наряду с другими естественными науками она изучает свойства окружающего нас мира.
Окружающий мир или материя существует в двух видах: вещество и поле. К веществу относятся - атомы, молекулы и все состоящие из них тела. К полям – электромагнитное поле, гравитационное поле и др. Различные виды материи могут превращаться друг в друга: вещество в поле и наоборот.
Одним из неотъемлемых свойств материи является движение. Движение несотворимо и неуничтожимо, как и сама материя. Материя существует и движется в пространстве и во времени. Пространство и время являются формами бытия материи.
§ 2. Методы физического исследования
Физика - наука экспериментальная. Физические законы устанавливаются на основе обобщения опытных фактов и выражают объективные закономерности, существующие в природе. Основными методами физического исследования являются: опыт, гипотеза, эксперимент, теория.
Опыт - это наблюдение исследуемого явления в точно контролируемых условиях.
Гипотеза - научное предположение, выдвигаемое для объяснения какого-либо факта или явления, требующее доказательства.
Эксперимент - научно поставленный опыт с целью проверки гипотезы.
Теория - система основных идей, обобщающих опытные данные и отражающих объективные законы природы.
§ 3. Роль физики в развитии техники
Физика является основой, фундаментом многих естественных и прикладных наук. Почти все естественные науки имеют физические разделы: математическая физика, астрофизика, физическая химия, биофизика. Физика является основой всех технических наук: теоретической механики, сопромата, электротехники, металловедения.
Физика выросла из потребностей техники. Развитие механики у древних греков, например, было вызвано запросами военной и строительной техники. Техника зачастую определяет тематику физических исследований. Так задача создания экономичных тепловых двигателей вызвала бурное развитие термодинамики.
Физика - база для создания новых отраслей техники (электронная техника, ядерная техника).
Поэтому физика - научная база, на которой должна основываться общетехническая подготовка специалистов.
4
РАЗДЕЛ 1. ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ
Механика - часть физики, изучающая простую и наиболее общую форму движения материи - механическое движение.
Механическим движением называется изменение с течением времени положения тел или их частей друг относительно друга.
Глава 1.1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Кинематика описывает движение тел без учета причин, его вызывающих. Основная задача кинематики - описание движения тела и определение положения тела в любой момент времени.
§ 1. Определения, модели кинематики
Макроскопическое тело - тело, образованное большим числом атомов.
Материальная точка (МТ) - тело, размерами которого в условиях данной задачи можно пренебречь.
Абсолютно твердое тело (АТТ) - система материальных точек, расстояния между которыми не меняются в процессе движения. Реальное тело можно считать абсолютно твердым, если в данной задаче его деформации пренебрежимо малы.
Тело отсчета - произвольно выбранное тело, относительно которого мы рассматриваем движение данного тела.
Система координат, связанная с телом отсчета, и отсчитывающие время часы составляют систему отсчета.
Траекторией называется линия, которую описывает в пространстве при своем движении материальная точка.
По форме траектории движение классифицируют как прямолинейное и криволинейное.
Путь - расстояние между начальной и конечной точками движения, отсчитанное вдоль траектории. Эта величина всегда положительна.
Перемещение - направленный отрезок, соединяющий начальную точку с конечной. Перемещение - величина векторная.
§ 2. Способы описания движения тела
Существует три способа описания движения тела или материальной точки: естественный, координатный, векторный.
1. Естественный способ (траекторный).
Он применим, если известна траектория материальной точки. На данной траектории устанавливается начало отсчета – точка О. Положение
точки А определяется дуговой координатой l (расстояние вдоль траектории). Дуговая координата является функцией времени: l=f(t).
5
2.Координатный способ.
Вэтом способе с выбранным телом отсчета жестко связывают систему координат (x, y, z). При движении материальной точки ее координаты с течением
времени меняются. Движение материальной точки можно описать системой
x f (t)
уравнений: y f (t) .z f (t)
Исключив зависимость от времени, получим уравнение траектории.
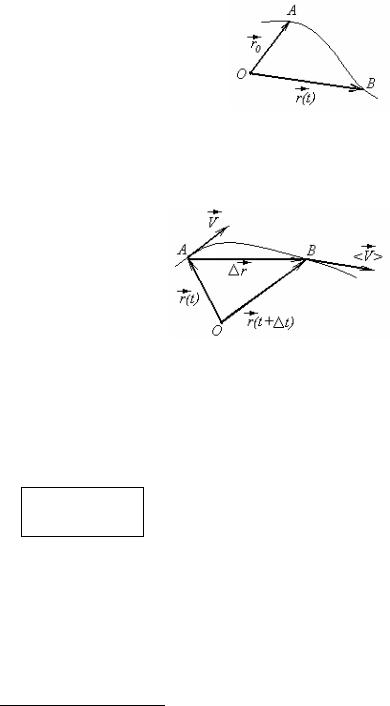
3. Векторный способ. |
|
|
Положение |
материальной точки |
А задают радиус- |
|
|
|
вектором r . Некоторую неподвижную точку О выбирают за |
||
начало отсчета и проводят из нее вектор в точку, где |
||
находится тело в данный момент времени. В процессе |
||
движения радиус-вектор изменяется и |
по величине и по |
|
|
|
|
направлению r r (t) . |
|
|
В дальнейшем мы будем пользоваться векторным способом описания |
||
движения. |
|
|
§ 3. Скорость
Рассмотрим движение материальной точки по
какой-либо траектории. |
Положение точки в момент |
||
времени t задается радиус-вектором |
|
||
r (t) . За |
|||
промежуток времени |
t произошло |
приращение |
|
|
|
|
|
радиус-вектора: r |
r (t t) r (t) . При движении |
||
радиус-вектор изменяется и по величине и по направлению. Чтобы показать, как происходит это изменение, вводится векторная величина – скорость.
Средней скоростью называется векторная физическая величина, которая показывает, какое приращение получает радиус-вектор за время t. Она равна
отношению приращения радиус-вектора к промежутку времени t, за которое r
произошло это приращение:
Vср V r . t
Направление средней скорости совпадает с направлением приращения радиус-
вектора . Измеряется средняя скорость: [V]=м/с. r
Если промежуток времени t будем уменьшать, то в пределе при t0 получим выражение для мгновенной скорости.
Мгновенная скорость, т.е. скорость тела в данный момент времени в данной точке траектории. Например, мгновенную скорость показывает спидометр автомобиля.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
r |
|
dr |
|
|
|||
|
V |
lim |
t |
|
|
r |
. |
||
dt |
|||||||||
|
|
t 0 |
|
|
|
|
6
Мгновенная скорость – это векторная физическая величина, равная первой производной радиус-вектора по времени. Вектор мгновенной скорости направлен по касательной к траектории в сторону движения.
|
|
|
|
Для системы координат (x, y, z) радиус-вектор: r |
xi |
yj |
zk . |
|
|
|
|
|
|
|
|
|
dx |
|
|
dy |
|
|
dz |
|
|
|
|
|
|
||||||||
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Скорость: V |
|
|
|
|
|
i |
|
|
|
|
j |
|
|
|
k , |
|
с другой стороны: |
V V |
i |
V |
y |
||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
dt |
|
|
dt |
|
|
dt |
|
|
dt |
|
|
x |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Отсюда: V |
|
|
dx |
, V |
|
|
dy |
, V |
|
|
dz |
|
|
- это |
|
компоненты скорости. |
|
Они |
|||||||||||
x |
|
y |
|
z |
|
|
|
||||||||||||||||||||||
|
|
dt |
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
производным соответствующих координат по времени. |
|
|
|
|
|||||||||||||||||||||||||
По мере уменьшения t путь S |
|
|
|
, тогда модуль скорости: |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||
|
r |
|
|
|
|
||||||||||||||||||||||||
|
|
j |
Vz k . |
|
равны |
V | V | |
|
|
|
|
|
|
|
|
lim r |
lim | r | lim S dS . |
|||||||
|
|
|
|
|
|
|
|
|
|
t 0 t |
t 0 |
t |
t 0 t dt |
||||
Модуль мгновенной скорости (числовое значение мгновенной скорости) равен первой производной пути по времени.
Если скорость постоянна и по величине и по направлению V const , то движение называется равномерным и прямолинейным.
Движение называется равномерным, если за любые равные промежутки времени материальная точка проходит одинаковые пути, то есть модуль скорости не изменяется: V const .
В случае неравномерного движения числовое значение мгновенной скорости с течением времени изменяется. Для неравномерного движения пользуются средней скоростью.
Выведем кинематическое уравнение для равномерного движения:
|
|
|
|
r |
t |
|
|
t |
|
|
|
|
dr |
|
|
||||||||
V |
|
|
; |
dr |
Vdt ; |
r |
r0 |
Vdt ; |
|
||
dt |
|
||||||||||
|
|
|
r0 |
0 |
|
|
0 |
|
|
||
|
|
|
|
|
|
|
|
||||
|
const , то кинематическое уравнение: |
|
|
||||||||
Если V |
r |
r0 |
Vt . |
||||||||
|
|
t |
|
r |
r0 |
Vdt . |
|
|
|
0 |
|
§ 4. Ускорение и его составляющие
При движении скорость может изменяться с течением времени и по величине и по направлению.
Векторная физическая величина, характеризующая быстроту изменения скорости по модулю и направлению, называется ускорением. Единица измерения ускорения: [a]=м/с2.
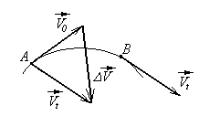
Пусть в момент времени t=0 в точке А скорость V0 . За время t движущаяся точка перешла в положение В и приобрела скорость Vt отличную от V0 и по величине и по направлению.
|
|
|
|
Перенесем вектор Vt |
в точку А и найдем приращение скорости: V |
Vt V 0 . |
|
7
Средним ускорением неравномерного движения называется векторная физическая величина, равная отношению изменения вектора скорости к интервалу времени t, за который произошло это изменение:
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
V |
|
|
|
|
a |
|
t |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Среднее ускорение a |
направлено по вектору приращения скорости V . |
|||||
Если t 0, то ускорение будет характеризовать изменение скорости на очень малом расстоянии, т.е. практически в точке, и его называют мгновенным ускорением.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
V |
|
dV |
|
|
|
||
a |
lim |
t |
|
|
V |
r |
|
. |
|
dt |
|||||||||
|
t 0 |
|
|
|
|
|
Мгновенное ускорение - есть векторная физическая величина, равная первой производной скорости по времени или второй производной радиус-вектора по времени.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
dV |
|
|
|
2r |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
axi |
ay j |
az k . |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
dt 2 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Отсюда: a |
|
|
dV |
x |
|
|
d 2 x |
; |
a |
|
|
|
dVy |
|
|
d 2 y |
; |
a |
|
|
dV |
z |
|
d 2 z |
. |
|
||||||||
|
x |
dt |
|
dt 2 |
|
y |
|
|
dt |
|
|
dt 2 |
z |
dt |
|
dt 2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Компоненты ускорения (ax , |
ay , |
az ) |
|
равны |
|
вторым |
производным |
|||||||||||||||||||||||||||
соответствующих координат по времени. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
Движение, |
при |
|
котором |
|
ускорение |
с течением |
|
времени |
не изменяется: |
|||||||||||||||||||||||||
const называется равноускоренным (равнопеременным) движением. |
|||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||
Выведем кинематические уравнения для равноускоренного движения:
dV a dt ;
dr V dt ;
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
t |
|
|
|
|
|
||||
dV |
a |
dt; |
dV |
adt; |
V |
V0 |
at; |
|
|
|||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
V0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
r |
|
|
t |
|
|
|
|
t |
||||
dr V dt; |
dr |
Vdt; |
r |
r0 |
|
Vdt |
V0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r0 |
|
|
0 |
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
||
at 2 |
at 2 |
|||||||
at dt V0t |
|
; r |
r0 |
V0t |
|
. |
||
2 |
2 |
|||||||
|
|
|
|
|
|
|||
Таким образом, кинематические уравнения для равноускоренного движения:
|
|
|
|
|
|
||
|
at 2 |
||||||
r |
r0 |
V0t |
|
|
|||
2 . |
|||||||
|
|
|
|
|
|||
|
|
|
|
||||
V |
V |
|
at |
|
|
||
|
|
0 |
|
|
|
||
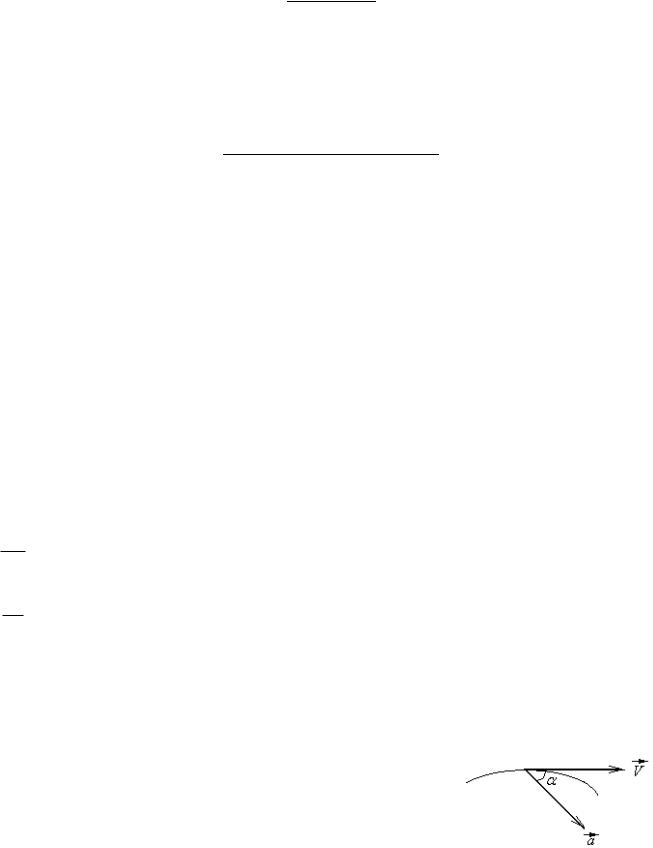
В общем случае, когда скорость тела изменяется и по
величине и по направлению, ускорение a направлено под некоторым углом к скорости V .
8
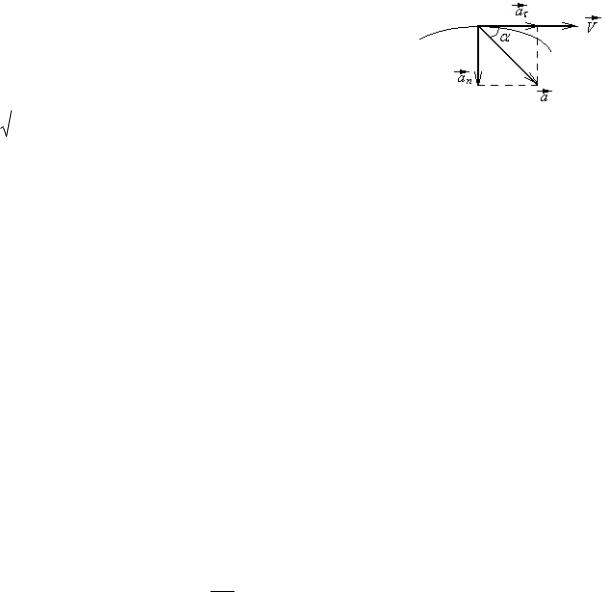
Разложим вектор ускорения на две составляющие:
одна составляющая |
|
будет |
направлена |
по |
вектору |
|
|
|
|
|
|
||||||||||||||||||||||||
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
скорости, другая |
|
перпендикулярно |
скорости. |
Тогда |
|
|
|
|
|
|
|||||||||||||||||||||||||
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
полное ускорение |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
a |
можно представить в виде векторной |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
суммы двух |
ускорений: |
a a |
an , |
а |
|
его |
модуль: |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
a2 a2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dV |
|
|
|
|
|
|
|
|
|
Тангенциальная |
составляющая |
ускорения: |
|
|
a |
|
|
|
|
характеризует |
||||||||||||||||||||
|
|
|
|
|
dt |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изменение скорости по величине, |
ее модуль: |
a |
|
dV |
, |
|
направление колинеарно |
||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||
вектору скорости V . |
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Нормальная составляющая ускорения: |
an |
|
|
|
n |
|
характеризует изменение |
|||||||||||||||||||||||
|
|
|
|
|
|
R |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
скорости |
|
по |
направлению, ее |
модуль: |
a |
|
|
V 2 |
|
, |
направление |
перпендикулярно |
|||||||||||||||||||||||
|
n |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вектору скорости V . Вектор нормального ускорения направлен к центру кривизны |
|||||||||||||||||||||||||||||||||||
траектории, поэтому |
|
называют часто центростремительным ускорением. |
|||||||||||||||||||||||||||||||||
an |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
С |
учетом значений |
тангенциальной |
|
|
и |
нормальной |
|
составляющих |
||||||||||||||||||||||
|
|
|
|
|
|
a |
an |
||||||||||||||||||||||||||||
ускорения, движение можно классифицировать следующим образом: |
|
||||||||||||||||||||||||||||||||||
|
a =0, |
an =0 |
|
|
|
const - движение равномерное и прямолинейное; |
|||||||||||||||||||||||||||||
1) |
a 0 , |
V |
|||||||||||||||||||||||||||||||||
2) |
a =const, an =0 - движение равноускоренное и прямолинейное; |
|
|
|
|||||||||||||||||||||||||||||||
3) |
a =f(t), an =0 - движение с переменным ускорением прямолинейное; |
||||||||||||||||||||||||||||||||||
4) a =0 (V=const), an =const ( an V 2 ) равномерное движение по окружности;
R
5)a =0, an =f(t) - движение равномерное криволинейное;
6)a =сonst, an =сonst - движение равнопеременное криволинейное;
7)a =сonst, an =f(t) - движение равнопеременное криволинейное;
8)a =f(t), an =сonst - движение с переменным ускорением криволинейное;
9)a =f(t), an =f(t) – движение с переменным ускорением криволинейное.
9
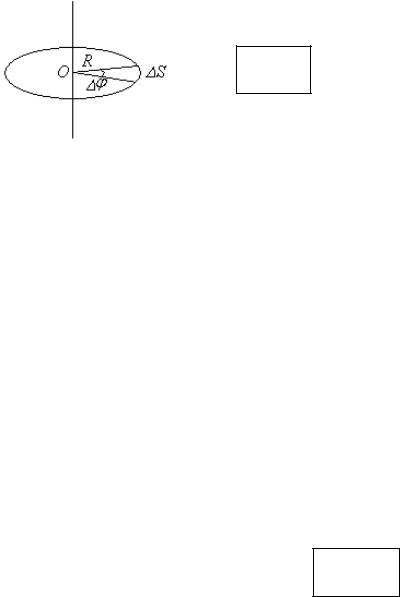
§ 5. Движение по окружности. Угловые характеристики
Пусть при движении материальной точки описывающий ее радиус-вектор r изменяется только по направлению, не изменяясь по величине. Тогда материальная точка будет двигаться по окружности радиуса R. Для описания ее движения введем новые физические величины.
Положение точки через промежуток времени t зададим углом поворота радиус-вектора :
S (длина дуги/радиус окружности).
R
Измеряется угол поворота в радианах: [ ]=рад.
Радиан – такой центральный угол, у которого длина дуги S численно равна радиусу окружности R.
При полном обороте вокруг оси: |
l |
|
2R |
2 |
(рад). |
|
R |
R |
|||||
|
|
|
|
Двигаться по окружности можно по часовой стрелке или против часовой стрелки. Таким образом, положение тела зависит от направления вращения. Введем
понятие вектора углового перемещения , модуль которого равен углу поворота, а
направление задается правилом правого винта: совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности.
Векторы, направления которых связываются с направлением вращения, называются псевдовекторами. Они не имеют определенных точек приложения, т.е. могут откладываться из любой точки оси вращения.
Чтобы охарактеризовать быстроту вращения (движения по окружности), вводят понятие угловой скорости.
Средней угловой скоростью называется векторная физическая величина, модуль которой равен отношению изменения угла поворота к интервалу времени t, за который произошло это изменение:
.t
Мгновенной угловой скоростью называется векторная физическая величина, равная по модулю первой производной угла поворота по времени:
lim |
|
|
d |
|
. |
|
t |
dt |
|||||
t 0 |
|
|
||||
Единица измерения угловой скорости: [ ]=рад/с.
Вектор угловой скорости направлен также как и угловое перемещение вдоль оси вращения по правилу правого винта.
Движение по окружности или вращение может быть равномерным и неравномерным.
10