

Физика-лекции
.pdfПри равномерном вращении за равные промежутки времени тело поворачивается на одинаковые углы , то есть const . Такое движение можно
характеризовать периодом вращения Т и частотой вращения .
Период вращения Т - время, за которое точка совершает один полный оборот,
т.е. поворачивается на угол 2 радиан: |
T |
t |
|
, где t - |
время, N - число оборотов. |
||||
N |
|||||||||
|
|
|
|
|
|
|
|
||
Измеряется период в секундах [T]=с. |
|
|
|
|
|
|
|
|
|
Если t T , =2 , то угловая скорость |
|
|
2 |
, откуда связь периода |
|||||
t |
T |
||||||||
|
|
|
|
|
|
|
|||
с угловой скоростью: Т 2 .
Частотой вращения называется число полных оборотов в единицу времени:Nt . Единица измерения частоты вращения: [ ]=с-1.
Связь частоты вращения с периодом: T1 2 , откуда связь угловой
скорости с частотой вращения: 2 .
Изменение угловой скорости со временем характеризуется угловым ускорением.
Средним угловым ускорением: называется векторная физическая величина, равная отношению изменения угловой скорости к интервалу времени t, за который произошло это изменение:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
. |
|
|
|
|
|
|
|
Мгновенным |
угловым |
ускорением |
называется |
векторная |
физическая |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
||
величина, равная первой производной угловой скорости по времени: |
|
|
|
|
. |
||||||||||||
dt |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
псевдовектор. Единица |
|||||||
Как и угловая скорость, угловое ускорение |
- |
||||||||||||||||
измерения углового ускорения: [ ]=рад/с2. |
|
|
|
|
|
|
|
|
|
|
|||||||
Если направление оси вращения |
|
|
|
|
|
|
|
|
|
|
|||||||
в пространстве |
не |
|
изменяется, |
то |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вектор угловой скорости может |
|
|
|
|
|
|
|
|
|
|
|||||||
изменяться только по модулю. Тогда |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
коллинеарны, |
причем |
|
|
|
|
|
|
|
|
|
|
||||
векторы |
и |
|
|
|
|
|
|
|
|
|
|
||||||
направлены в одну сторону, если |
|
|
|
|
|
|
|
|
|
|
|||||||
вращение |
ускоренное, |
и |
в |
|
|
|
|
|
|
|
|
|
|
||||
противоположные |
стороны, |
|
если |
|
|
|
|
|
|
|
|
|
|
||||
вращение |
замедленное. Т.е. |
вектор |
|
|
|
|
|
|
|
|
|
|
|||||
углового ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
направлен в сторону элементарного приращения угловой |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорости . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11

|
|
|
|
Найдем связь угловых характеристик , |
с линейными V |
, a . |
|
Точка, отстоящая от оси вращения на расстояние R, при повороте тела на уголпроходит путь: S R . Разделим на t и осуществим предельный переход
t 0:
V lim |
S |
|
lim (R |
) R lim |
|
R . |
|
t 0 |
t |
|
t 0 |
t |
t 0 |
t |
|
Таким образом, связь между |
модулями |
линейной |
и угловой скоростей: |
||||
V R .
Будем определять положение точки с помощью радиуса-вектора r , проведенного из произвольной точки О на оси вращения. Из рисунка видно: R r sin . Подставим в формулу линейной скорости: V r sin .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
позволяют записать: |
|
|
|
|||
Взаимные направления векторов , |
r , |
V |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r sin R . |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
V |
[ , r ], модуль V |
V |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Нормальная составляющая ускорения (модуль): |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
(R)2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
n |
|
|
|
|
|
|
|
|
|
|
|
2 R . |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Модуль тангенциальной составляющей ускорения: |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
a |
|
|
|
dV |
|
d (R) |
|
R |
d |
R , т.к. R=const. |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|||||||||
В векторном виде: a |
|
, r , модуль: |
r sin R . |
|
|
|
|
|
|||||||||||||||||||||||||||||||
Для удобства сведем в таблицу: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Линейные |
|
|
|
|
|
|
|
|
Угловые |
|
|
|
|
|
|
Связь между ними |
|
||||||||||||||||||||||
характеристики |
|
|
|
|
характеристики |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dS R d |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
V dt r |
|
|
|
|
|
|
|
|
|
dt |
|
|
V R , |
V [ , r ] |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a R , |
|
||||
a |
|
|
dV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
, r |
|||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
an |
|
V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
n |
2 R |
|
||||||||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12

§ 6. Виды движений
Поступательное движение – движение, при котором любая прямая, жестко связанная с телом, остается при его движении параллельной самой себе.
Возьмем произвольные точки 1 и 2 в твердом теле.
При |
поступательном |
движении вектор |
|
=const. |
|
Из |
||||
r12 |
|
|||||||||
рисунка: |
|
|
|
Продифференцируем: |
|
|
|
|
т.е. |
|
r |
r |
r . |
|
r |
r , |
|
||||
|
|
2 |
1 |
12 |
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
||
V V . И еще один раз продифференцируем: |
V |
V |
, |
т.е. |
||||||
2 |
1 |
|
|
|
|
|
2 |
1 |
|
|
a2 a1 . Таким образом, при поступательном движении тела скорости и ускорения точек 1 и 2 одинаковы.
Тот же результат получим для любой произвольно выбранной пары точек этого тела.
Вывод: При поступательном движении все точки твердого тела имеют в любой момент времени одинаковые скорости и ускорения, а, следовательно, и траектории всех точек идентичны и могут быть совмещены параллельным переносом. Для описания поступательного движения достаточно знать, как движется одна из точек тела.
Вращательное движение - движение, при котором все точки тела описывают окружности, лежащие в параллельных плоскостях, центры которых расположены на одной прямой, называемой осью вращения.
Плоское движение твердого тела – такое движение, при котором все точки тела движутся в параллельных плоскостях.
Произвольное плоское движение можно представить как совокупность поступательного и вращательного движения. Разбиение движения на поступательное и вращательное движение можно осуществить множеством
способов.
Рассмотрим цилиндр радиуса R, который катится без скольжения по плоскости. Скорость поступательного движения
V0 . Примем одну из точек, лежащих на оси вращения, за начало
координат О. Скорость вращательного движения любой точки тела:
|
|
V |
[ ,r ], |
где r - радиус-вектор, проведенный из точки О в любую точку тела.
Следовательно, скорость точек тела относительно неподвижной системы отсчета:
|
|
|
|
|
. |
V |
V0 |
V |
V0 |
, r |
Обычно точку О выбирают в центре масс тела. Тогда V0 Vc , а вращение происходит вокруг оси, проходящей через этот центр масс.
Особенно удобным оказывается разбиение произвольного плоского движения на поступательное, происходящее со скоростью центра масс Vc и вращательное вокруг оси, проходящей через этот центр.
13
Глава 1.2. ДИНАМИКА ЧАСТИЦ
Динамика изучает движение тел во взаимосвязи с теми причинами, которые обуславливают тот или иной характер движения. В основе классической динамики лежат три закона Ньютона.
§ 1. Первый закон Ньютона, инерциальные системы отсчета
Относительно разных систем отсчета движение носит неодинаковый характер. Так относительно кузова автомобиля точка на ободе колеса движется по окружности, а относительно Земли – по циклоиде.
Существуют такие системы отсчета, относительно которых тела движутся без ускорения, т.е. равномерно, если на них не действуют другие тела. Эти системы отсчета называются инерциальными.
Любая система отсчета, которая либо покоится, либо движется равномерно и прямолинейно относительно инерциальной системы отсчета, является также инерциальной системой отсчета. Докажем это.
|
|
|
|
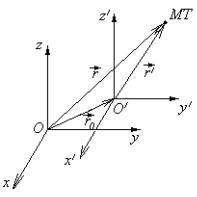
Рассмотрим движение материальной точки МТ |
|||||||||||||
|
|
|
|
относительно систем К и К . |
Пусть система К движется |
||||||||||||
|
|
|
|
относительно системы К с постоянной скоростью V0 . |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r r0 |
r |
|
|
|
|
||
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
(r0 |
r |
) или |
V |
V0 |
V . |
|
|
|
|
|
|
|
|
|
dt |
dt |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Пусть на МТ не действуют никакие тела и система К |
|||||||||||||
|
|
|
|
инерциальная. Скорость МТ в системе К будет постоянной |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V const . |
Тогда |
|
в |
|
выражении: |
V |
V0 |
V |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V |
const, |
V0 |
const |
V const . Т.е. скорость МТ в системе К постоянна. Это |
|||||||||||||
значит, что система отсчета К – инерциальная.
Инерциальной является система отсчета, начало которой совмещено с центром Солнца, а оси направлены на неподвижные звезды. Эта система называется гелиоцентрической. Система отсчета, связанная с Землей, неинерциальная. Но ускорение, с которым движется Земля настолько мало, что при решении задач систему отсчета, связанную с Землей можно считать инерциальной.
Свойство тела сохранять состояние покоя или равномерного прямолинейного движения при отсутствии воздействия других тел называется инерцией.
Первый закон Ньютона называется по-другому законом инерции.
Первый закон Ньютона: всякое тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит его изменить это состояние.
Закон инерции или первый закон Ньютона широко распространен в природе, часто применяется в быту, в производстве: вытряхивание пыли, набивание лопаты на черенок, маховики и другое.
14

§ 2. Динамические величины
Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют свою скорость. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (его массы).
Масса тела – скалярная физическая величина, определяющая его инерциальные свойства. Масса – это мера инертности тела.
Измеряется масса в системе единиц измерения СИ в килограммах [m]=кг.
Сила - векторная физическая величина, характеризующая воздействие на данное тело других тел. Сила является причиной ускорения тела. Измеряется в ньютонах: [F]=Н.
Импульс тела - векторная физическая величина, равная произведению массы тела на его скорость и имеющая направление скорости:
pm V .
Единица измерения импульса: [p]=кг м/с.
§ 3. Второй закон Ньютона
Второй закон Ньютона – основной закон динамики поступательного движения. Второй закон Ньютона отвечает на вопрос, как изменяется механическое движение тела под действием приложенных сил.
В результате действия на тело силы (или нескольких сил) тело приобретает ускорение. Было обнаружено, что:
a F (m=const),
a |
1 |
(F=const). |
|
m |
|||
|
|
Используя эти соотношения и учитывая, что сила и ускорение – векторные величины сформулируем второй закон Ньютона.
Второй закон Ньютона: ускорение, приобретаемое телом, совпадает по направлению с действующей силой и равно отношению этой силы к массе:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
a |
|
|
|
или |
F |
ma |
|
. |
|
|
|
|
|
|
|
||||
|
|
|
|
m |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
dV |
|
|
|
|
|
|
|
dp |
|
|
|
||||||
Преобразуем эту запись: |
F ma |
m |
|
|
|
|
(mV ) |
|
, |
при |
условии, что |
|||||||||||||
dt |
dt |
|
dt |
|||||||||||||||||||||
m=const. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Более общая формулировка второго закона Ньютона: скорость изменения |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
dp |
|
|
|
|
|
|
|
||||
импульса тела равна действующей на него силе: |
F |
|
|
|
|
|
. |
|
|
|
|
|
||||||||||||
|
dt |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
Если на |
тело |
действуют |
несколько |
сил, |
то Fi Fрез |
и |
второй закон |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ньютона: Fрез |
ma , |
Fрез |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15
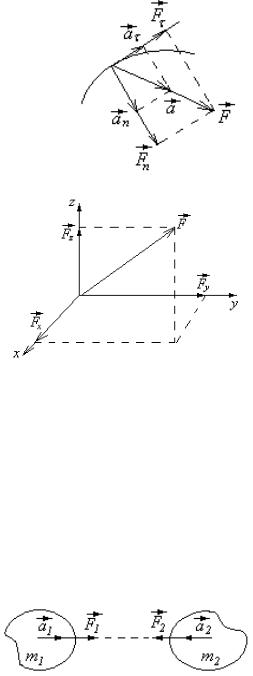
В механике существует принцип независимости действия сил: если на тело действует одновременно несколько сил, то каждая из этих сил сообщает телу ускорение согласно второму закону Ньютона, как будто других сил нет.
Согласно этому принципу силы и ускорения можно разложить на составляющие, что приведет к упрощению решения задач.
1) Например, разложим силу F на две составляющие: тангенциальную и нормальную к траектории. Зная, что
a |
|
dV |
; |
a |
|
|
V 2 |
; |
|
V R , |
можно рассчитать составляющие |
|
|
||||||||||||||
|
n |
|
|
||||||||||||||||||||||||
|
|
dt |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
силы: F ma m |
dV |
|
; F ma |
|
m |
V 2 |
|
m 2 R . |
|
|
|||||||||||||||||
|
|
n |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
n |
|
|
|
|
R |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2) |
Если |
имеется |
система |
декартовых координат |
|
|
|||||||||||||||||||||
(x, y, z), то силу можно разложить на составляющие |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
по соответствующим осям: |
F Fx Fy |
Fz . Тогда: |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Fx max |
; Fy |
may ; |
|
Fz |
|
maz |
|
|
|||||||||||||
|
|
|
|
|
|
F m |
d 2 x |
; F |
|
m |
d 2 y |
; F m |
d 2 z |
. |
|
|
|||||||||||
|
|
|
|
|
|
|
y |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
x |
dt 2 |
|
|
dt 2 |
|
|
z |
|
dt 2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
3) Если задано некоторое направление осью l, то проектируем векторы F |
a на это |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fl |
mal . |
|
|
||||||
направление и получим: |
F |
ma |
, |
|
|
||||||||||||||||||||||
|
|
Второй закон Ньютона справедлив только в инерционных системах |
отсчета. |
||||||||||||||||||||||||
Первый закон Ньютона является частным случаем второго закона: если F 0 , то |
|||||||||||||||||||||||||||
|
|
|
|
0, т.е. |
|
|
|
const , |
следовательно, тело движется равномерно и |
||||||||||||||||||
F |
ma , |
a |
|
|
V |
||||||||||||||||||||||
прямолинейно.
§ 4. Третий закон Ньютона
Характер взаимодействия между телами определяется третьим законом Ньютона. Он тоже справедлив только в инерциальных системах отсчета.
Третий закон Ньютона: силы, с которыми действуют друг на друга два тела, всегда равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти тела:
|
|
|
|
F1 |
F2 |
, по модулю: F1 |
F2 . |
Или более упрощенно: всякое действие носит характер взаимодействия.
Силы всегда возникают попарно. Они не могут уравновешивать друг друга, т.к. приложены к разным телам.
16

|
|
|
|
|
|
|
|
|
|
|
|
|
F |
m a |
|
|
|
|
|
|
m |
|
|
||
1 |
1 1 |
|
|
|
|
2 |
||||||
|
|
|
, |
m1a1 |
m2a2 |
, |
a1 |
|
|
a2 . |
||
m |
||||||||||||
F2 |
m2 a2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
|
|||
Ускорения двух взаимодействующих тел обратно пропорциональны их массам и направлены в противоположные стороны.
§ 5. Силы
Сила является характеристикой взаимодействия тел, причиной ускорения тела. За каждой силой надо видеть тело, воздействием которого обусловлена данная сила.
1) Сила тяжести.
В системе отсчета, связанной с Землей, на всякое тело действует сила, называемая силой тяжести
тяж . Она обусловлена гравитационным
F mg
притяжением тела к Земле, приложена к центру масс тела, направлена к центру Земли.
2) Сила реакции опоры или подвеса.
Если тело подвесить или положить на опору, то оно будет покоиться относительно Земли. Сила тяжести уравновешивается силой, называемой реакцией подвеса или опоры. Силой реакции
называются силы, с которыми на данное тело действуют тела, ограничивающие его
N , направлена перпендикулярно
Сила трения возникает при относительном перемещении двух соприкасающихся твердых тел (сила трения скольжения) или попытках вызвать такое перемещение (сила трения покоя), направлена противоположно относительному перемещению данного тела и приложена по касательной к соприкасающимся поверхностям.
|
|
|
|
|
|
||
Подействуем на тело внешней силой |
Fвнеш . Вначале |
||||||
брусок неподвижен. Внешняя сила уравновешивается силой |
|||||||
трения, направленной |
по |
касательной |
к трущимся |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
поверхностям, противоположно внешней силе: |
Fв неш Fтр.пок 0 |
, |
Fв неш Fтр.пок |
|
. |
||
Это сила трения покоя. Если увеличивающаяся внешняя сила превысит максимальное значение силы трения покоя Fв неш Fтр.пок. max , то сила трения покоя
сменяется силой трения скольжения Fтр.ск .
Опытным путем установлено, что Fтр не зависит от площади соприкосновения тел и пропорциональна модулю силы нормального давления, прижимающей
17

трущиеся поверхности друг к другу. Сила нормального давления равна силе реакции опоры. Тогда сила трения скольжения:
Fтр.ск N ,
где - коэффициент трения, безразмерная величина, N – сила реакции опоры. Трение качения в десятки раз меньше трения скольжения:
Fтр.кач. fкач N ,
r
где fкач - коэффициент трения качения, измеряется в метрах: [fкач ]=м; r- радиус катящегося колеса.
4) Сила упругости.
Под действием внешних сил возникает деформация тела. Если после прекращения действия внешних сил восстанавливаются прежние форма и размеры тела, то деформация называется упругой. Будем рассматривать только упругие деформации.
В деформированном теле возникают упругие силы, которые уравновешивают внешние силы, вызвавшие деформацию.
Установленный экспериментально закон Гука утверждает, что при упругой деформации удлинение пружины пропорционально внешней силе:
x 1k Fвнеш.х .
Упругая сила отличается от внешней только знаком. Тогда закон Гука можно записать:
Fупр.х kx ,
где k - жесткость пружины, зависит от материала, размеров витка и длины пружины; Fупр.х – проекция упругой силы на ось ОХ, х –удлинение пружины.
4) Вес.
Вес тела - это сила, с которой тело действует на подвес или опору вследствие гравитационного притяжения к Земле. Обозначается вес P.
4.1) Опора или подвес покоятся относительно Земли или движутся без ускорения.
|
|
|
|
|
|
|
По второму закону Ньютона: mg |
N 0 . |
|||||
|
|
|
|
|
|
|
По третьему закону Ньютона: N |
P . |
|||||
|
|
|
|
|
|
|
Отсюда: mg |
P 0. |
|
||||
|
|
|
|
- вес тела равен силе тяжести. |
||
|
|
|||||
|
P mg |
|
||||
18
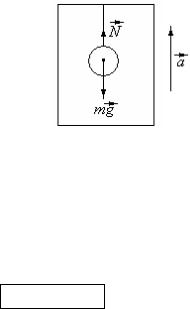
4.2) Опора или подвес движутся с ускорением.
Пусть подвес прикреплен к потолку кабины лифта, которая
движется с ускорением a . С таким же ускорением движется и тело.
|
|
|
|
|
|
|
|
|
|
|
|
По второму закону Ньютона: mg |
N ma . |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
По третьему закону Ньютона: N |
P . |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда: mg |
P ma |
. P mg ma m(g |
a) . Вес не равен силе тяжести. |
||||||||
а) |
|
|
|
|
|
|
|
направлено противоположно ускорению свободного |
|||
a |
g |
- ускорение a |
|||||||||
падения |
(лифт |
движется |
равноускоренно вверх или равнозамедленно вниз): |
||||||||
P m(g a) |
, |
P mg . |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
сонаправлено ускорению свободного падения: (лифт |
|||||
a |
g |
- ускорение a |
|||||||||
движется равноускоренно вниз или равнозамедленно вверх): P m(g a) , P mg .
в) |
|
|
|
Р 0 . Если лифт оборвется и будет падать с ускорением равным |
a |
g |
g , то тело перестанет действовать на опору или подвес. Следовательно, вес тела
будет равен нулю. Это состояние невесомости. Космический корабль, летящий по орбите с неработающими двигателями, движется, как и оборвавшийся лифт, с
ускорением g . Поэтому тела внутри корабля находятся в состоянии невесомости.
19
Глава 1.3. ЗАКОНЫ СОХРАНЕНИЯ
§ 1. Определения, понятия
Совокупность тел, выделенных для рассмотрения, называется механической системой.
Тела системы могут взаимодействовать как между собой, так и с телами, не входящими в систему. Силы, действующие на тела системы делятся на внешние и внутренние.
Силы, с которыми тела системы взаимодействуют друг с другом называются
внутренними.
Силы, обусловленные воздействием тел, не принадлежащих системе, называются внешними.
Система называется замкнутой или изолированной, если на нее не действуют внешние силы.
Для замкнутых систем сохраняются (остаются постоянными) три физических величины: энергия, импульс и момент импульса. Соответственно существуют три закона сохранения: закон сохранения энергии, закон сохранения импульса, закон сохранения момента импульса. Законы сохранения являются фундаментальными законами природы. Они имеют всеобщий характер, т.е. применимы ко всем явлениям природы. Законы сохранения не зависят от характера действующих сил. С их помощью можно сделать ряд важных заключений о поведении механической системы даже тогда, когда силы остаются неизвестными.
§ 2. Закон сохранения импульса
Рассмотрим механическую систему, состоящую из N тел, для которых:
массы: |
m1, m2, … mN; |
|
||
скорости: |
V1 , V2 , … VN ; |
|
||
|
|
|
|
|
внешние силы: |
F1 |
, F2 |
, …, FN |
; |
внутренние силы: f12, fik, …, fN,N-1.
Первый индекс i - указывает номер частицы, на которую действует сила, второй индекс к – номер частицы, со стороны которой действует сила.
Уравнения движения для тел системы:
d (m V ) |
|
|
|
|
f |
|
|
f |
|
|
... f |
|
|
F |
|||||||||||||
|
dp1 |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dt |
1 |
1 |
|
|
|
dt |
|
|
|
|
|
12 |
|
|
13 |
|
|
1N |
|
|
1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
d |
|
dp2 |
|
|
|
|
|
|
... |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
(m V |
|
) |
|
|
|
|
|
|
|
f |
|
|
f |
|
|
f |
|
|
F |
||||||
dt |
2 |
|
|
|
|
|
|
|
21 |
23 |
2 N |
||||||||||||||||
2 |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d |
|
|
|
|
dpi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
(miVi ) |
|
|
|
|
|
|
fi1 |
fi 2 |
|
|
... fiN |
Fi |
|
||||||||||||
dt |
|
|
dt |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
dp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d |
(mN VN ) |
|
|
N |
|
|
|
f N1 |
|
f N 2 ... |
f N ,N 1 FN |
|||||||||||||||
|
|
dt |
|
||||||||||||||||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Сложим вместе эти уравнения.
20