

1. Зертханалық жұмыс №1. Сызықты дифференциалды теңдеулермен жазылған динамикалық үзбелерді модельдеу
Зертханалық жұмыстың мақсаты:
1) Дифференциалды теңдеулермен жазылған динамикалық үзбелердін беріліс функцияларын табу.
2) Диференциалды теңдеуді MatLab ортасында модельдеу схемасын құрастыру.
3) Динамикалық үзбені MatLab ортасында модельдеу.
1.1. Негiзгi теориялық мәлiметтер
Автоматтық реттеу жүйелерін есептеп құрастырғанда, оны ең алдымен динамикалық үзбелерге бөледі. Динамикалық үзбе деп бір дифференциалды теңдеумен жазылатын кез келген физикалық заңдарына бағынатын әр түрлі конструкциясы бар құрылғыны айтады. Осыған сүйеніп динамикалық үзбелерді теқ қана дифференциалды теңдеулер түріне қарап жіктеуге болады. Бір дифференциалды теңдеумен әр түрлі құрылғылар жазылуы мүмкін, мысалы ретінде айтып кетуге болады: механикалық, гидравикалық, пневматикалық және басқа түрлеріде болуы мүмкін.
Демек, динамикалық үзбе стандартты түрдегі бірінші ретті біртекті сызықты дифференциалды теңдеумен жазылсын:
![]() . (1)
. (1)
Осы
дифференциалды теңдеудің Лаплас бейнесін
табайық. Ол үшін Лаплас операторын
қолдану қажет. Бұл оператордың түрі
мынандай
![]() .
Онда барлық айнымалылардың Лаплас
бейнелерін таба аламыз
.
Онда барлық айнымалылардың Лаплас
бейнелерін таба аламыз
![]() ,
,![]() ,
,![]() ,
,
Осыдан дифференциалды теңдеудің Лаплас бейнесін таба аламыз:
![]() .
.
Ары
қарай, берілген дифференциалды теңдеумен
жазылатын динамикалық үзбенің
![]() беріліс функциясын табуға болады. Ол
үшін келесі қатынасты табу қажет
беріліс функциясын табуға болады. Ол
үшін келесі қатынасты табу қажет![]() ,
мұндағы
,
мұндағы![]() ,
,![]() – шығаберіс және кіреберіс шамалардың
Лаплас бейнелері. Онда
– шығаберіс және кіреберіс шамалардың
Лаплас бейнелері. Онда
![]() . (2)
. (2)
1.2. Әдістемелік үлгі
Дифференциалды теңдеулерді модельдеу кезінде интегралдау үзбелері қолданылады. Ең алдымен дифференциалды теңдеуді жоғары туынды бойынша шешімін табу керек. Мысалы, динамикалық үзбе (1) дифференциалды теңдеумен жазылсын.
![]() . (3)
. (3)
Бұл
теңдеу бірінші ретті. Сол себептен (3)
дифференциалды теңдеуді шығару үшін
оңы бір рет интегралдау қажет. Шешімді
анықтау үшін бастапқы шартты, x
айнымалының бастапқы мәнің беру қажет,
![]() .
Онда, осы бастапқы шарттарға сәйкес
дифференциалды теңдеудің шешімін
табады.
.
Онда, осы бастапқы шарттарға сәйкес
дифференциалды теңдеудің шешімін
табады.
Б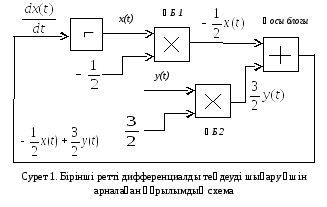 ұл
дифференциалды теңдеуінің шешімін
іздеу үшін, келесі құрылымдық схеманы
құрастырайық (сурет 1).
ұл
дифференциалды теңдеуінің шешімін
іздеу үшін, келесі құрылымдық схеманы
құрастырайық (сурет 1).
Бұл
схемада интегралдау үзбенің кіреберісінде
![]() болса, оның шығаберісіндеx(t)
айнымалысының түрі табылады. Ары қарай
осы x(t)
айнымалысын ҚБ1
қөбейту блогы арқылы
болса, оның шығаберісіндеx(t)
айнымалысының түрі табылады. Ары қарай
осы x(t)
айнымалысын ҚБ1
қөбейту блогы арқылы
![]() бөлшегіне қөбейтіп, нәтижесінде
бөлшегіне қөбейтіп, нәтижесінде![]() функцияны табамыз. Ары қарай, тура
осылайшаҚБ2
қөбейту блогы арқылы
функцияны табамыз. Ары қарай, тура
осылайшаҚБ2
қөбейту блогы арқылы
![]() функциясын табамыз. Енді,Қосы
блогы арқылы
табылған екі функцияны бір-біріне
қосамыз, нәтижесінде
функциясын табамыз. Енді,Қосы
блогы арқылы
табылған екі функцияны бір-біріне
қосамыз, нәтижесінде
![]() функциясы табылады. Ал табылған функция
(3) бойынша
функциясы табылады. Ал табылған функция
(3) бойынша![]() тең, осылайша дифференциалды теңдеудің
шешімін табуға болады.
тең, осылайша дифференциалды теңдеудің
шешімін табуға болады.
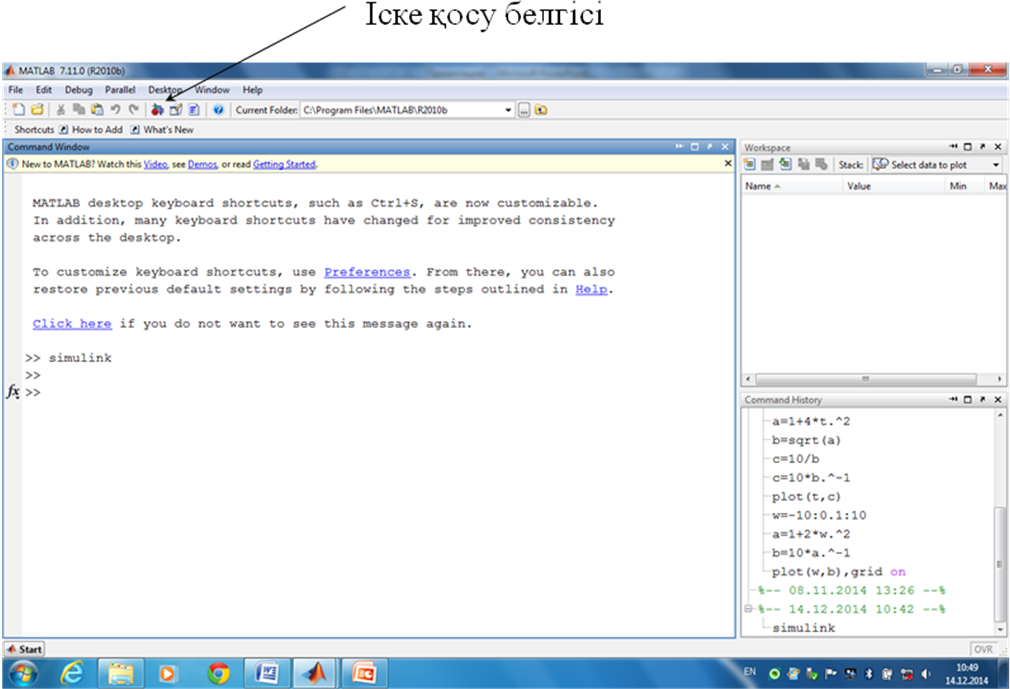
Онда, сурет 1 қөрсетілген құрылымдық схеманы MatLab матрицалық жүйесінің, Simulink визуалды блоктар түріндегі модельдеу пакеті арқылы іске асырғаның қарастырайық. Ол үшін комппьютерге, айтылған программалық өнімді орнату қажет. Ары қарай MatLab программалық өнімді жұмысқа қосады. Нәтижесінде сурет 2 қөрсетілген терезе табылады. Программалық жолда >>simulink, немесе сурет 2 қөрсетілген іске қосу белгісін тінтуірдің меңзерін, оның сол жақтағы батырмасын басу қажет.
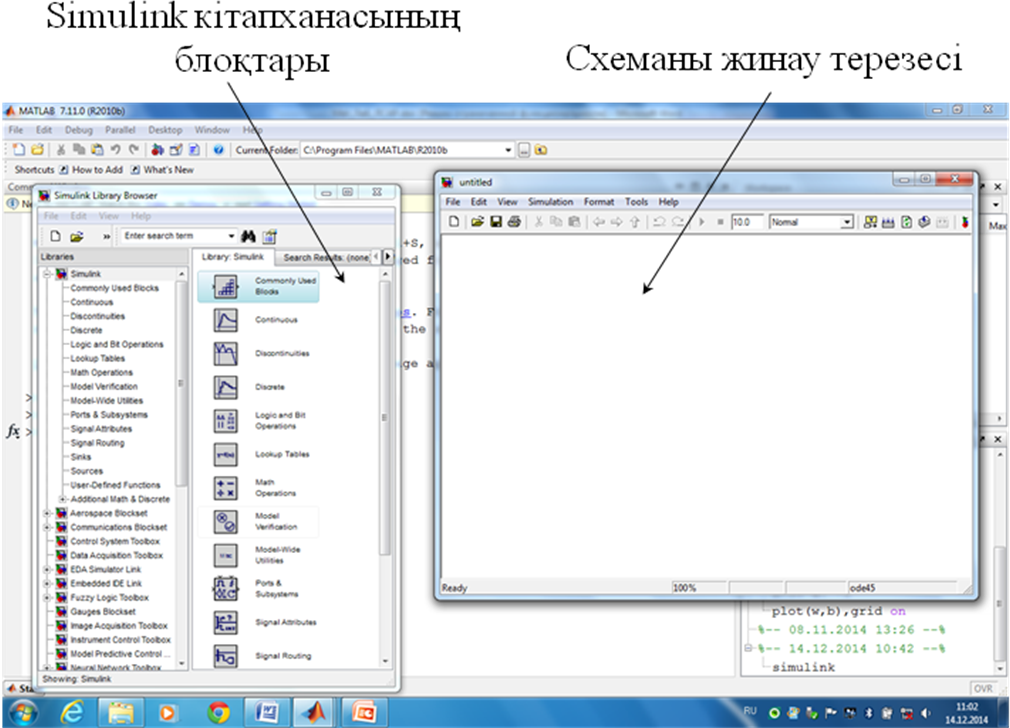
Осы операцияны орындаған сон, сурет 3 қөрсетілген Simulink–тін негізгі терезесі пайда болады. Ары қарай осы негізгі терезеде тінтуірмен меізерді File белгісіне апарып басады, сонда терезеде New, Open, Close және Preferences белгілері пайда болады. Енді New, одан кейін Model белгілерін меңзермен қөрсетіп тінтуірдің сол жақатғы батырмасын басып жіберсек, схеманы жинау терезесі пайда болады (сурет 3). Енді, осы терезеде Simulink кітапханасының блоктары арқылы схеманы жинауға болады.

Simulink кітапханасының Commonly Used Blocrs блоктар жиынтығын таңдап алып, арасынаң Integrator блогын тінтуірдің сол жақтағы батырмасын басып турып, схеманы жинау терезесіне жылжытып орналастырайық (сурет 4). Ары қарай осы блоктардың арасынаң Gain блогын алып оны да схеманы жинау терезесіне апарып орналастырамыз. Енді Integrator блогының шығаберісіне тінтуірдің меңзерін апарып сол жақтағы батырмасын бассақ, косу белгісі пайда болады, осы белгіні Gain блогынының кіреберісіне жеткізсек, екі блок бір-бірімен қосылады.
Сурет
4.
Simulink–те
терілген
модель мен нәтижелер терезелері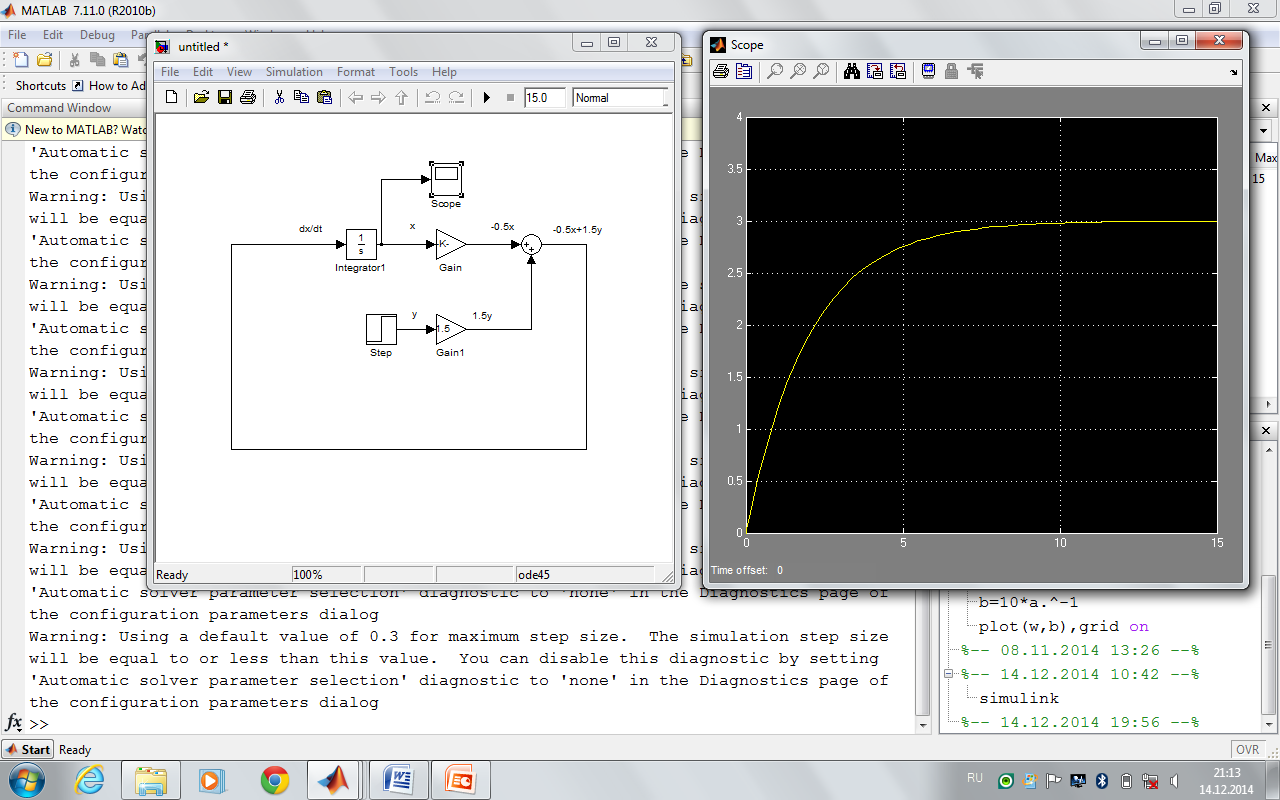
Gain блогынына тіңтуір меңзерін апарып сол жақтағы батырмасын екі рет бассақ, блоктың терезесі ашылады. Онда қажетті -0.5 коэффициент мәнің орнатамыз, блоқтың шығаберісінде -0.5x шамасы табылады. Тура осылайша тағыда бір Gain блогын қосамыз. Бұл блокта -1.5 коэффициент мәнің береміз. Оның кіреберісіне y шамасы ретінде Sources блоқтар жиынтық арасынаң Step сигналын алайық. Ары қарай оларды Commonly Used Blocrs блоктар жиынтығынаң Sum блогын алып, оның кіреберісіне екі Gain блоктардың шығаберістерін қосамыз. Sum блогының шығаберісін Integrator блогының кіреберісіне жалғастырсақ, нәтижесінде сурет 1 құрылымдық схеманың Simulink терезесіндегі моделі табылады. Енді Sinks блоктар жиынтығынаң Scope блогын таңдайық. Бұл блоктың кіреберісіне x сигналын қосу қажет. Ол үшін Integrator блогының шығаберісіне тінтуір меңзерін апарып компьютер пернетақтасының Ctrl батырмасын басып тұрып, оны Scope блогының кіреберісіне қосады. Енді Simulink терезесіндегі модельдеу белгісін басып, нәтижесінде сурет 4 сол жағындағы график табылады.
Е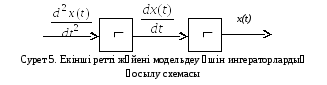 гер
екінші ретті динамикалық үзбені
қарастырсақ, онда екі интеграторды қосу
қажет (сурет 5).
гер
екінші ретті динамикалық үзбені
қарастырсақ, онда екі интеграторды қосу
қажет (сурет 5).