

Лекция 13. Теория технокарта
С 1971 г. Народное предприятие «Карл Цейсе Йена» (ГДР) начало выпускать новый высокоточный универсальный прибор — технокарт, предназначенный для обработки стереоскопических пар наземной съемки, полученных при горизонтальном расположении оптических осей съемочной камеры и осей хх снимков.
В нем
пространственная фотограмметрическая
засечка реализуется с помощью плоских
линеек, которые
расчленяют пространственные проектирующие
лучи по двум плоскостям
проекции XY
и YZ.
В технокарте мостик отстояний (МО)
и
высот (MB)
находятся
со стороны наблюдательной системы, а
снимки размещены
сзади. Таким образом, для наблюдения
точек заднего
плана стереомодели приходится приводом
У не удалять МО
от
наблюдателя, а, наоборот, приближать.
В
технокарте увеличился формат снимков
до 23![]() 23
см и диапазон установокфокусных
расстояний от 50 до 215 мм. Суппорты базисных
компонентов
позволяют устанавливать их значения в
пределах:
23
см и диапазон установокфокусных
расстояний от 50 до 215 мм. Суппорты базисных
компонентов
позволяют устанавливать их значения в
пределах:
![]() от
0 до 215 мм;
от
0 до 215 мм;
![]() =
=![]() от
0 до 20 мм. Диапазон модельных координат
(КО и KB)
равен ±240 мм, а МО
—
от 35 до 350 мм.
от
0 до 20 мм. Диапазон модельных координат
(КО и KB)
равен ±240 мм, а МО
—
от 35 до 350 мм.
Счетчик высот прибора позволяет строить модель в девяти различных масштабах: 1 : 800; 1 : 1000; 1 : 1250; 1 : 1600; 1 : 2000; 1 : 2500; 1 : 3000; 1 : 4000; 1 : 5000. Редуктор координатографа прибора обеспечивает передачу масштаба модели к масштабу плана в пределах 0,16-6,25.
Общий вид технокарта с координатографом показан на рис. 32.
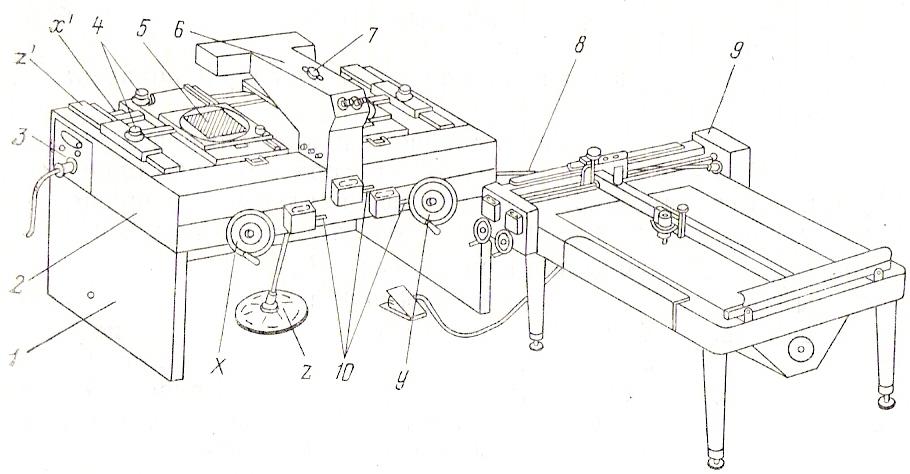
Рисунок 32 – Технокарт
Он состоит из следующих, связанных между собой, узлов: станины, проектирующей системы, наблюдательной системы, системы механических передач, системы счетных механизмов, координатографа.
1. Станина прибора 2 с помощью трех подъемных винтов установлена на основание в виде стола 1, который, в свою очередь, имеет четыре подъемных винта. На ее переднюю панель вынесены штурвалы X и Y. Рядом с ними находятся заимные винты и счетчики координат. Под станиной имеется ножной штурвал Z, связанный с помощью телескопического кардана и системы зубчатых передач с кареткою высот (КВ) проектирующей системы и счетчиком высот, установленным в средней части панели станины.
На верхней поверхности станины размещены ручки 4 со шкалами суппортов фокусных расстояний проектирующей системы, и направляющие х' и г', по которым перемещаются каретка снимков 5.
Над
каретками снимков находится консоль
6,
где
смонтированы
оптические элементы наблюдательной
системы прибора. На ней размещены
окуляры, ручки для регулирования резкости
изображения
снимков, ручки, регулирующие яркость
освещения снимков
и марок, исправительные винты измерительных
марок. а
также переключатели ограничителей при
использовании снимков
форматом 23![]() 23
см или 18
23
см или 18![]() 18
см.
18
см.
Для
доступа к кареткам КО и KB,
базисным суппортам
![]() ,
,![]() ,
,![]() ,конвергентному
устройству g
и
разъемным гайкам приводов
X
и
Z
передние крышки станины сделаны съемными.
,конвергентному
устройству g
и
разъемным гайкам приводов
X
и
Z
передние крышки станины сделаны съемными.
На правой боковой стенке станины выведены цапфы карданных валов приводов X, У, Z, к которым подключаются карданные валы 8, идущие к механизму передач координатографа 9. На левой боковой стенке станины находится щиток 3, где размещены штепсельная розетка для подключения прибора к сети переменного тока с частотой 50 Гц и напряжением 110, 127 и 220 В, выключатель и предохранители. Для соблюдения техники безопасности прибор заземляется.
2. Проектирующая система прибора показана на рисунке 33.
Механизмы определения планового и высотного положения точки в ней разделены и расположены горизонтально один под другим.
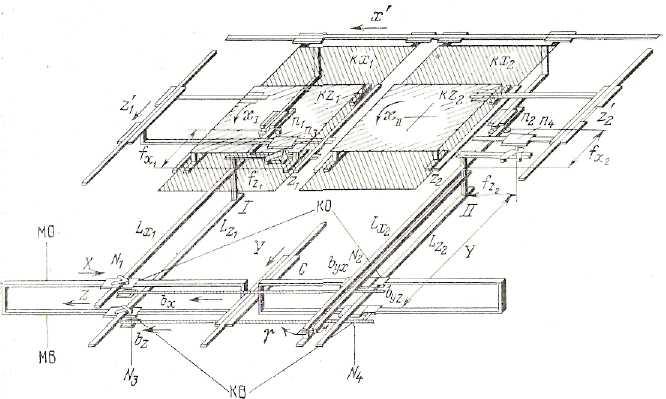
Рисунок 33 – Проектирующая система технокарта
На
станине укреплены две вертикальные оси
вращения
I
и II,
вокруг которых вращаются соответственно
линейки Lx1,
Lz1
и
Lx2,
Lz2.
Длинные
плечи линеек Lx1,
и Lx2
шарнирно
связаны роликами
N1
и N2
с каретками КО, которые с помощью винта
и привода X
(на
рисунке не показаны) могут перемещаться
по направляющей X,
жестко
связанной с салазкой С.
В
свою очередь, С с помощью ходового винта
и привода У (на рисунке
не показан) перемещается по направляющей
оси У. Обе каретки
КО связаны между собой винтом
![]() ,
посредством
которого
меняется расстояние между роликами N1
и
N2
и
тем самым устанавливается
необходимый базис проектирования в
масштабе
выбранной модели в проекции на ось X.
Геометрически
его величина равна
разности отрезков I
II
—N1_N2.
Ролик N2
на правой
каретке укреплен на крестообразном
базисном суппорте
,
посредством
которого
меняется расстояние между роликами N1
и
N2
и
тем самым устанавливается
необходимый базис проектирования в
масштабе
выбранной модели в проекции на ось X.
Геометрически
его величина равна
разности отрезков I
II
—N1_N2.
Ролик N2
на правой
каретке укреплен на крестообразном
базисном суппорте
![]() t
что
позволяет устанавливать эту базисную
составляющую в
проекции на ось У и тем самым осуществлять
обработку стереопар
отклоненных случаев съемки.
t
что
позволяет устанавливать эту базисную
составляющую в
проекции на ось У и тем самым осуществлять
обработку стереопар
отклоненных случаев съемки.
Короткие плечи линеек Lx1 и Lx2 связаны шарнирами п1 и п2, которые находятся на суппорте фокусных расстояний fх1 п fx2 кареток снимков kx1 и kx2. При повороте линеек Lx1 и Lx2 каретки перемещают снимки по направляющей х'. Если короткое плечо линейки Lx1 всегда лежит на прямой линии с длинным, то короткое плечо линейки Lx2 с длинным может находиться под углом g, который устанавливается в пределах от +6 до —2g, что позволяет вести обработку конвергентного случая съемки в указанных пределах. На тех же осях I и II под линейками Lx1 и Lx2 вращаются линейки Lz1 и Lz2 Их длинные плечи шарнирами N3 и N4 связаны с каретками KB, соединенными между собой винтом bz, для установки между ними значения превышения концов базиса фотографирования в масштабе модели. Каретки KB с помощью ходового винта, связанного с ножным штурвалом (на рис. 33 не показан), перемещаются совместно по направляющей Z, расположенной ниже направляющей X. Ролик N4 на правой каретке KB установлен на крестообразном суппорте byz, который совместно с bz позволяет автоматически исключать величину поперечного параллакса при наблюдении стереомодели. Короткие плечи линеек Lz1 и Lz2 повернуты на 90° и шарнирами n3 и n4, установленными на суппортах фокусных расстояний fz1 и fz2 связаны с каретками kz1 и kz2, которые перемещаются вместе со снимками по взаимно параллельным направляющим z¢1, z1 и z¢1. z2, установленным перпендикулярно к направляющей х'.
3. Наблюдательная система прибора. Оптические элементы наблюдательной системы размещены в коробке 6 консольного типа (рис. 32), расположенной выше кареток снимков 5. Она позволяет вести конгруэнтные наблюдения снимков с разрешением не менее 50 л/мм при увеличении 6х. Для стереоскопических измерений в системе использован принцип двух марок, которые с помощью фильтров окрашены в зеленый цвет. Каждая марка имеет собственный источник света.
На
верхнюю крышку консоли 6
выведена
ручка для фокусировки
наблюдаемых снимков 7.
Рядом с ней, по бокам
консоли, выведены котировочные винты
марок, необходимые при определении
мест нулей шкал прибора bx,
X,
bz,
Z.
Кроме
них на левой
боковой стенке консоли находятся ручка
переключения освещения
снимков, наблюдаемых в проходящем или
отраженном свете; реостат освещения
левого снимка; реостат яркости левой
марки. На правой стенке размещены реостат
освещения правого снимка,
реостат яркости правой марки, ручка
переключения диапазона
измерения снимков по оси z
при
форматах 18![]() 18
см и
24
18
см и
24![]() 24
см.
24
см.
Окуляры наблюдательной системы позволяют менять расстояния между центрами зрачков в пределах 54-75 мм и устанавливать на резкость измерительные марки в пределах 5 диоптрий.
4. Система механических передач прибора, состоящая из ведущих винтов, карданов и шестерен, служит для перемещения мостика отстояний, кареток отстояний и высот при вращении штурвалов X, У и ножной педали Z, счетчиков X,Y,Z, а также карданных втулок, предназначенных для присоединения карданных валов координатографа. Последние выведены на общую плиту, закрепленную внутри правого переднего угла станины. Плита имеет по две карданные втулки для каждой координаты и по накатанной рукоятке, что позволяет производить присоединение карданных валов координатографа в любом сочетании, обеспечивая, таким образом, проектирование на горизонтальную, вертикальную или боковую координатные плоскости. Накатанные рукоятки предназначены для перемещения реверсивных шестерен в нейтральные положения пли в положение связи с карданными валами.
5. С и с т е м а счетных механизмов состоит из счетчиков пространственных координат, установочной шкалы У, проектирующей системы базисных компонентов, конвергентного устройства и счетчиков фокусных расстояний.
На переднюю панель корпуса станины выведены счетчики пространственных координат. Вращение штурвалов X и У передается на счетчики X и У через системы постоянных шестерен. За один оборот штурвалов происходит перемещение МО и КО на 3 мм. На такую же величину меняются отсчеты по счетчикам. Точность отсчетов по счетчикам соответствует 0,01 мм. Аналогичный счетчик имеется и у координаты Z. Он связан с ножным штурвалом через две пары шестерен, карданный вал с системой сменных шестерен, в комплект которых входят 4 шестерни с разными передаточными отношениями. Это позволяет снимать отсчеты по Z непосредственно в метрах. Подбор этих шестерен производится по табл. 7.
Установка
их осуществляется с правой стороны
нижней части
наблюдательной системы, доступ к которым
открывается при
сдвиге предохранительного кожуха
станины. С правой стороны
счетчиков X,
Y
и Z
находятся качающиеся стержни с
накатанными головками 10
(рис. 32). При среднем
положении стержней
счетчики координат отключаются. Вращением
головок на
них можно установить необходимые
начальные отсчеты. При крайнем
правом или левом положении
стержней счетчики соединяются
с передающими шестернями.
При этом меняется лишь направление
вращения цифр
счетного устройства.
При установке счетчика У
возрастание цифр должно соответствовать
вращению штурвала
по часовой стрелке, а
счетчиков X
и
Z
при
перемещении
кареток снимков кх
и
kz
-
влево и к наблюдателю. Для установки
действительного
удаления МО от осп вращения
I
— линейки Lx1
служит
шкала с миллиметровыми
делениями и нониусом, расположенная
параллельно ходовому винту Y.
При этом отсчеты по счетчику Y
должны
соответствовать делениям этой шкалы
в пределах 35-350 мм с точностью до 0,1 мм.
На рис.34 показан внешний вид отсчетных
приспособлений
![]() ,
,![]() ,
,
![]() ,
,
![]() и
конвергентного устройства g,
размещенных на правой КО.
и
конвергентного устройства g,
размещенных на правой КО.
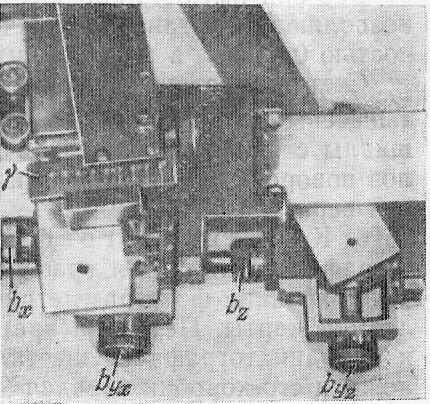
Рисунок 34 – Конвергентное устройство и базисные суппорты технокарта
Все они имеют линейные шкалы и барабаны-микрометры, позволяющие установить значение базисных компонентов с точностью 0,02 мм, а конвергенцию — с точностью до сантиграда.
Счетчики установки фокусных расстояний fx1, fx2, fz1, fz2 вынесены па верхнюю панель станины. Они имеют круговые шкалы с ценой деления 0,02 мм. Там же находятся шкалы углов поворота снимков на углы χ в пределах ±30д с ценой деления верньера 5с.
6.Координатограф
Z-Е
900![]() 1200
служит для графической регистрации
наблюдаемых точек
и линий фотограмметрической модели в
масштабе составляемой
карты. Передача вращения ходовых винтов
технокарта и
координатографа осуществляется с
помощью карданных валов
8
и
его коробки передач 9
(рис.
32) в соответствии с коэффициентом
R
=
1200
служит для графической регистрации
наблюдаемых точек
и линий фотограмметрической модели в
масштабе составляемой
карты. Передача вращения ходовых винтов
технокарта и
координатографа осуществляется с
помощью карданных валов
8
и
его коробки передач 9
(рис.
32) в соответствии с коэффициентом
R
=
![]() ,где
Мm
-
знаменатель масштаба модели,
а Мk
- знаменатель
масштаба плана. В коробку передач
вставляются
4 шестерни, подобранные согласно табл.
8.
,где
Мm
-
знаменатель масштаба модели,
а Мk
- знаменатель
масштаба плана. В коробку передач
вставляются
4 шестерни, подобранные согласно табл.
8.
Координатограф снабжен двумя счетчиками координат, аналогичных X и У прибора, которые могут быть использованы для подготовки основы при составлении топокарты. При обработке снимков на технокарте их следует отключить от координатографа. Цена делений счетчиков 0,01 мм.
Для расширения сферы применения техпокарта Народное предприятие «Карл Цейсе Йена» (ГДР) начало поставлять в виде самостоятельного узла преобразователь углов наклона, позволяющий обрабатывать снимки, снятые с фиксированными углами наклона оптических осей, равных 15. 30, 45°, снятых камерой UMK 10/1318.
Принцип действия его заключается в механическом преобразовании координат Yw и Zw с помощью набора шестеренок, рассчитанных в зависимости от синусов и косинусов этих углов и дифференциалов, моделирующих сумму и разность произведений, по формулам
5 = Yw cos w - Zwsinw, Z = Yw sinw + Zw cosw, (57)
координаты X при этом не изменяются.
Осн.:1[50-52], 3[10-12]
Контрольные вопросы:
Перечислить системы технокарта.
Как реализуется пространственная фотограмметрическая засечка?
Из чего состоит система счетных механизмов?
Из чего состоит система счетных механизмов?
Цена делений счетчиков координатографа?
Лекция 14. Методика обработки фототеодолитных снимков на технокарте.
Обработка снимков наземной съемки с целью составления топографического плана производится на соответствующих универсальных приборах практически одинаково.
Для этого необходимо иметь следующие материалы:
- негативы стереоскопических пар различных случаев съемки, подобранных по станциям фотографирования;
- контактные отпечатки с отдешифрированными контрольными точками и их абрисами или фотоабрисами, с указанием мест наведения сетки нитей теодолита на точки при решении прямых засечек;
- контактные отпечатки с результатами полевого дешифрирования элементов ситуации и рельефа;
- каталог координат станций фотографирования и контрольных точек;
- ведомости базисов фотографирования и их дирекционных углов;
- отчетную схему фототеодолитной съемки.
Процессу составления предшествуют подготовительные работы, которые заключаются в рабочих поверках приборов и подготовке основы для составления.
Топографические планы составляются на планшетах с жесткой основой или па пластинках в пределах трапеций принятой разграфки.
С помощью координатографа па планшете строится сетка геодезических координат. По координатам с помощью счетчиков координатографа в масштабе плана наносятся углы рамок трапеций, станции фотографирования, контрольные точки и направления осей У фотограмметрической системы координат по предварительно рассчитанным дирекционным углам для различных случаев съемки по формулам
![]() ,
,
![]() ,
,
![]() (58)
(58)
Эти направления строятся по координатам заранее рассчитанных точек, которые выбираются с таким расчетом, чтобы они находились в пределах планшета на максимальном расстоянии от левой точки стояния камеры.
Координаты вычисляются по формулам
![]()
![]() (59)
(59)
где
![]() —
дирекционные углы соответствующих
направлений
оптических осей при различных случаях
съемки.
—
дирекционные углы соответствующих
направлений
оптических осей при различных случаях
съемки.
Если точка стояния не находится в пределах планшета, на котором будет производиться составление топокарты по данной стереопаре, то вычисляются две точки направления оптической оси. Одна должна попадать на нижний, а другая — на верхний край планшета. Расстояния от точки S1 выбираются кратными десяткам метров (50, 100, 200 и т. д.).
После нанесения всех точек на планшете подписываются их номера в соответствии с каталогом и их геодезические отметки.
Далее приступают к построениям связок проектирующих лучей. Для этой цели левый негатив эмульсией вниз укладывается па левый снимкодержатель, а правый аналогично на правый, чтобы в их торцы упирались с одной стороны пружинные толкатели, а с другой центрировочные винты. Негативы слегка зажимаются на спимкодержателях зажимными планками.
С помощью центрировочной лупы и винтов добиваются такого положения, при котором отверстия координатных меток будут пересекаться координатными штрихами снимкодержателей. После этого негативы закрепляются зажимными планками, а снимкодержатели по центрировочным шпилькам укладываются на соответствующие каретки снимков прибора.
Далее, открепив зажимные винты всех четырех суппортов фокусных расстояний, с помощью установочных винтов устанавливают значение фокусного расстояния снимка. В результате будут построены связки проектирующих лучей, подобные моменту фотографирования.
При наличии неприжима фотопластинок к плоскости прикладной рамки установка негативов производится согласно [12] в следующем порядке. Мостик отстояний с помощью штурвала Y перемещается в положение Y = 2f и закрепляется стопорным винтом. С помощью штурвала X левую измерительную марку совмещают с центральным крестом левого снимкодержателя, а правую марку конвергентным винтом γ совмещают с центральным крестом правого снимкодержателя. После этого измеряют абсциссы координатных меток 1, 2, 3, 4 на левом и правом негативах и берут отсчеты VxnAi, по которым вычисляют смещение меток по оси х по формулам:
![]()
![]() ,
(60)
,
(60)
где
![]()
l°х1, l°x2 — расстояния между координатными метками 1, 2 по осп хх снимка и линией, соединяющей координатные метки 3, 4 для случая плотного прижима фотопластинки к прикладной рамке камеры. Исправленные за неприжим фокусные расстояния для левого и правого фотоснимков находят по формуле
![]() (61)
(61)
где
![]() ,
а
,
а![]()
После
этого найденные значения фокусных
расстояний устанавливаются
на соответствующих суппортах плановых
и высотных
линеек. Далее повторными измерениями
абсцисс координатных
моток находят
![]() .
.![]() Если
Если
![]() >0,02
мм, то вычисляют поправку
>0,02
мм, то вычисляют поправку
![]() которую
вводят в установку отсчета
которую
вводят в установку отсчета![]() правого суппорта. Затемвычисляют
децентрацию правого снимка
правого суппорта. Затемвычисляют
децентрацию правого снимка
![]() .
.
Используя сдвиг правого негатива вдоль оси х2, центрирующим винтом правого снимкодержателя совмещают координатную метку 3 или 4 с правой измерительной маркой. Левую марку штурвалом X вновь совмещают с координатными метками 3 или 4, а не совмещение правой марки с вертикальными метками на правом негативе устраняют с помощью конвергентного устройства.
Контролем правильности устранения неприжима является отсутствие продольных параллаксов на всех четырех координатных метках. Допустимая величина продольного параллакса не должна превышать половины диаметра марки.