

Подготовка инструментов , оборудования и материалов
До выезда на участок работ следует:
тщательно проверить, отремонтировать и отъюстировать все приборы;
составить перечень необходимых материалов и оборудования с учетом материалов, которые можно получить на месте работ;
— подготовить все приборы, материалы и оборудование для транспортировки на участок работ.
В перечень приборов для съемки входят; 1) фототеодолитны и комплект; 2) теодолит для измерений, связанных с построением съемочного обоснования (с точностью отсчитывання по горизонтальному и вертикальному кругам не менее 10"); 3) нивелир технической точности с комплектом реек; 4) стальная рулетка (длиной до 50 м); 5) тесьмяная рулетка для измерения высоты инструмента; 6) тахеометр или мензульный комплект для досъемки «мертвых» пространств; 7) бинокль шести- или восьмикратного увеличения;
простейший угломер для рекогносцировки контрольных точек;
компас; 10) фотоэкспонометр.
Подготовку приборов к полевым работам следует начинать с внешнего осмотра каждого прибора для проверки исправности всех узлов и деталей, легкости и плавности движения подвижных частей и т. д.
После устранения обнаруженных неисправностей и укомплектования каждого прибора запасными принадлежностями должны быть произведены поверка, юстировка и исследование точности работы прибора.
Для выполнения фотолабораторных, вычислительных и графических работ необходимо подготовить следующие приборы и принадлежности: 1) специальную палатку — фотолабораторию, если съемочный отряд размещается вне населенного пункта; 2) бачки (не менее трех) для фотолабораторной обработки негативов; 3) кюветы (не менее пяти) размером 300 X 400 мм; 4) фонарь с красным фильтром (или электролампу красного цвета); 5) стеклянную посуду для составления и хранения проявителя и фиксажа; 6) простейшие весы с разновесом; 7) термометр технический; 8) копировальную рамку или копировальный прибор; 9) лупы (6— 10х); 10) стереоскоп для топографического дешифрирования объектов на контактных отпечатках; 11) инструменты и таблицы для вычислений 12) чертежные инструменты и принадлежности.
Стереопары, заснятые с непривязанных базисов, должны быть обеспечены дополнительно четвертой корректурной точкой, расположенной на ближнем плане вблизи оси правого снимка. Рабочая площадь стереопары, обеспеченной четырьмя контрольными точками, есть четырехугольник abc'd'. Ближней ее границей является прямая, проведенная через корректурную точку на ближнем плане перпендикулярно к осям У.
Координаты контрольных точек могут быть определены или из геодезических измерений, или фотограмметрическим способом. При выборе способа определения каждой из запроектированных контрольных точек следует учитывать сложность и трудоемкость геодезических работ, маркировки и необходимость производства дополнительных фототеодолитных работ.
Учитывая это и опыт производства фототеодолитных съемок, рекомендуется:
а) при съемках в масштабах 1: 500 и 1: 1000 контрольные точки определять преимущественно геодезическим способом;
б) при съемках в масштабах 1: 2000 и 1: 5000 часть пунктов, достаточно удобных для полевых геодезических работ и маркировки, определять геодезическим методом, остальные фотограмметрическим;
в) контрольные точки для всех дополнительных стереопар, предназначенных только для покрытия отдельных «мертвых» пространств, независимо от масштаба топографической съемки рекомендуется определять фотограмметрическим способом.
Геодезическая привязка базисных и корректурных точек проектируется в соответствии со следующими положениями:
1) геодезическое определение базисных и корректурных точек выполняется с соблюдением норм точности и методов, предусмотренных инструкциями по топографическим съемкам в соответствующих масштабах для пунктов съемочного обоснования; в соответствии с этим разрешается определять координаты указанных точек различными способами теодолитным ходом, аналитической сетью, прямыми, комбинированными и обратными засечками;
2) для уменьшения объема геодезических работ следует стремиться к тому, чтобы по возможности наибольшее количество пунктов съемочной сети совпадало с базисными или корректурными точками;
3) для каждого базиса достаточно определения геодезических координат только одной из его конечных точек. Предпочтительно (если это не связано со значительным усложнением работы) определять левую точку базиса.
Фотограмметрическое определение корректурных точек может быть выполнено способом прямых засечек или пикетным способом.
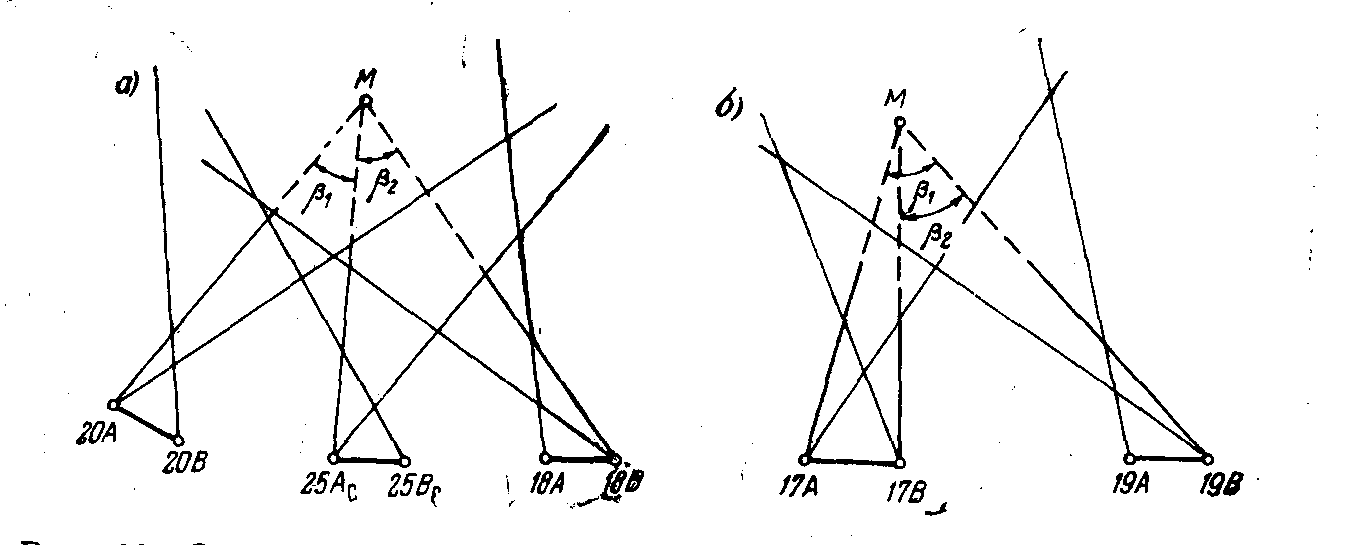
Рисунок 22 - Определение точек прямыми фотограмметрическими засечками: а) с трех фотостанций,б) с двух фотостанций
При определении точек прямыми фотограмметрическими засечками зона намеченного расположения каждой точки должна быть сфотографирована не менее чем с двух базисов, привязанных геодезическим способом. Рекомендуемые схемы фотограмметрических определений показаны на рисунке 22 (определяемая точка М). Все точки, определяемые фотограмметрическим путем, рекомендуется показывать на проектной схеме условным знаком, отличающимся от обозначения точек, геодезической привязки, и подписывать порядковыми номерами с добавлением буквы ф (например, 15ф).
Для удобства пользования проектной схемой при полевых работах целесообразно также дать различные условные знаки для точек, определяемых пикетным способом.
Осн.:2 [33-37],3 [40-42],
Контрольные вопросы:
С какого хода осуществляют геодезическую привязку базисов и контрольных точек?
Со скольких точек осуществляют привязку контрольных точек?
3. Что необходимо для уменьшения объема геодезических работ?
4. Необходимые материалы для наземной фотосъемки.
5. Фотограмметрический способ определение контрольных точек.
Лекция 7. Особенности фототеодолитной съемки с малых расстояний
Применение фотограмметрических измерений для исследования моделей основывается на методах и приборах, используемых при съемке сооружений и для топографических целей.
Однако при испытаниях моделей возникает ряд специфических особенностей. Съемку моделей производят со сравнительно малых расстояний, поэтому необходимо установить оптическую сопряженность между объектом и его изображением.
Фототеодолиты, применяемые для топографических целей к съемки сооружений, имеют фотокамеры с постоянным фокусным расстоянием, равным фокусному расстоянию объектива, поэтому плоскость прикладной рамки фотокамеры, а следовательно, и фотопластинка расположены в фокальной плоскости объектива, что соответствует получению резкости изображения при съемке удаленных объектов. для выполнения условия резкости изображения при съемках с малых расстояний необходимо, как известно, при приближении к объекту съемки увеличить фокусное расстояние фотокамеры. Поэтому необходимо, чтобы фотокамеры, ‘предназначенные для съемки с различных расстояний, имели переменное фокусное расстояние.
Для съемки с малых расстояний некоторые стереофотограмметрические камеры имеют постоянное фокусное расстояние, отъюстированное для получения резкого изображения в определенном диапазоне расстояний до объекта. К таким камерам, в частности, относятся стереофотограмметрические камеры SMK5,5/0808.
Для съемок моделей с близкого расстояния можно использовать фотокамеры UМК 10/1318,UМК 20/1318, фотокамеры ИФ-1, ИФ-2 (КГУ), которые имеют выдвигающиеся объективы, что дает возможность выполнять съемку, начиная с расстояний 1 - 2 м.
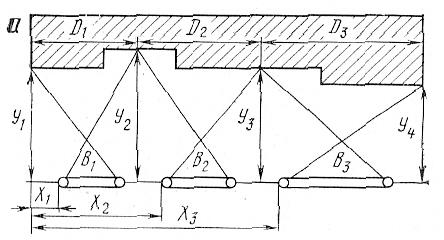
Рисунок 23 – Съемка зданий с изолированных базисов
При съемках с малых расстояний фототеодолитами с постоянным фокусным расстоянием фотокамеры, отъюстированным на бесконечность, возникает нерезкость изображения. Поэтому необходимо рассчитать минимальное расстояние до объекта, при котором изображение его на снимке получится достаточно резким для измерительных целей. Это расстояние определяется по формуле
![]() , (15)
, (15)
где δ -
допустимый диаметр кружка нерезкого
изображения точки;
![]() - относительное отверстие объектива
фотокамеры.
- относительное отверстие объектива
фотокамеры.
Это расстояние Dназывается гиперфокальным т. е. расстоянием до точки на оптической оси фотокамеры, начиная от которой и до бесконечности все предметы на изображении получаются резкими (при заданном максимальном диаметре δ кружка нерезкости).
Формула (8) показывает, что при съемке с малых расстояний резкость изображения можно повысить диафрагмированием. Увеличение кружка нерезкости δ влияет на измерительную точность снимка. Однако если измерения на снимках производят по маркированным точкам, то величина нерезкости сказывается в меньшей степени, поскольку, хотя края марки и изобразились несколько нерезкими, визирование на центр марки при измерениях на стереокомпараторе выполняется почти с. одинаковой точностью.
Опыт работ показывает, что при измерении по маркированным точкам можно допустить нерезкость порядка 0,1 мм и, следовательно, снимать маркированные объекты с расстояний, примерно в пять раз меньших немаркированных.
При съемках моделей контрольные и определяемые точки всегда маркируются, поэтому при расчетах по формуле (8) можно принять δ = 0,1 мм.
Многие фототеодолиты, такие как С-Зв, Photheo19/1318 и др., имеют постоянную диафрагму, равную - 1/25. Поэтому при съемке этими фотокамерамиf = 200 мм минимально допустимые расстояния не должны быть меньше 15-16 м. Однако модели часто необходимо (для повышения точности измерений) снимать с более близких расстояний, поэтому возникает необходимость при съемке с малых расстояний увеличивать фокусное расстояние фотокамеры. Такое изменение фокусного расстояния в соответствии с основным уравнением оптики определяется по формуле
![]() , (16)
, (16)
где Y0- отстояние до плоскости объекта, на которую производится наводка на резкость.
Так, для съемки с расстояния 2 м фокусное расстояние фотокамер с f = 200 мм следует увеличить на 20 мм; при съемке с 1 м на 50 мм. Такое увеличение фокусного расстояния фототеодолита наиболее просто выполнить при помощи переходных колец. Однако надо иметь в виду, что при большой длине переходного кольца уменьшается поле изображения. Так, при съемке с 1 м и длине переходного кольца в 50 мм диаметр поля изображения уменьшается до 12 см. Сохранить поле изображения можно путем переделки передней планки фототеодолита для установки колец большего диаметра. Изменение фокусного расстояния фотокамеры возможно и изменением прикладной рамки, что более сложно.
При съемке с близких расстояний следует обращать внимание на получение резкого изображения, особенно при съемке длиннофокусными фотокамерами, поскольку для них уменьшается глубина резкости при наводке фотокамерами с переменным фокусным расстоянием на близкие предметы.
Глубину резкости изображаемого пространства ∆Y при съемке можно вычислить по значению гиперфокального расстояния
 , (17)
, (17)
где Y0- Отстояние до плоскости наводки на резкость;D- гиперфокальное расстояние, определяемое формулой (17) при заданном значении диаметраδкружка нерезкости.
Граница глубины резкости можно вычислить по формулам
![]() ; (18)
; (18)
![]() . (19)
. (19)
Отстояние до плоскости наводки на резкость в зависимости от границ глубины резкости определяется по формуле
![]() . (20)
. (20)
Формулы (17) – (20) являются расчетными при съемке с близких расстояний для выбора фокусного расстояния объектива, плоскости наводки на резкость глубины и границы резкости.
С целью увеличения точности результатов и учитывая небольшие колебания отстояний, следует принять условие
![]() . (21)
. (21)
Углы фотограмметрических засечек в наблюдаемых точках при этом увеличатся, и соответственно повысится точность конечных результатов.
Осн.:5 [40-45]
Контрольные вопросы:
1. Минимальное расстояние до объектива
2. Чем повышается резкость изображения при съемке с малых расстояний?
Формулы границы резкости.
Условие увеличения точности результатов при небольшие колебания отстояний.
Лекция № 8. Элементы ориентирования фототеодолитных снимков
Элементами внутреннего ориентирования определяют положение центра проекции относительно снимка. К ним относятся: f – фокусное расстояние фотокамеры,хо , zо–координаты главной точки снимка (рис.24)

Рисунок 24 – Элементы внутреннего ориентирования
Эти величины позволяют восстановить по снимку связку лучей, существовавшую в момент фотографирования.
Положение точек снимка относительно главной точки о определяется их координатамих,zв системехz, оси которой параллельны осямхи z, а началом является точкао (рис.24).
Координаты х,z вычисляются по формулам

![]() (22)
(22)
При юстировке фототеодолита координатные метки устанавливают таким образом, что точка пересечения прямых ххи zzпрактически совпадает с основанием перпендикуляра, опущенного из задней узловой точки объектива камеры на плоскость прикладной рамки. Прямую, совпадающую с перпендикуляром, называютоптической осью камеры. В процессе фотографирования фотопластинка при помощи специального устройства прижимается к прикладной рамке. Поэтому начало координат осовпадает с главной точкой, т. е.хо =zо = 0 их = х,z =z, а фокусное расстояние снимка равно расстоянию от задней узловой точки объектива до плоскости прикладной рамки.
Если по каким-либо причинам в момент фотографирования пластинка Р(рис. 25) неплотно прижата к прикладной рамке камерыРо, то фокусное расстояние снимкаf=Soотличается от фокусного расстоянияfк=Soи координатыхо,zо главной точки снимка могут быть не равны нулю.
Поэтому для восстановления связки проектирующих лучей необходимо вводить соответствующие поправки в координаты х,zточек снимка и в фокусное расстояние fккамеры фототеодолита.

Рисунок 25 – Неплотное прилегание фотопластинки к прикладной рамке
Положение связки проектирующих лучей относительно геодезической системы координат определяют шестью величинами, которые называют элементами внешнего ориентирования (рис. 26).

Рисунок 26 – Элементы внешнего ориентирования
К ним относятся: XS.YS. ZS – координаты центра проекции S в геодезической системе; - дирекционный угол главного луча So; - угол наклона главного луча к горизонтальной плоскости; - угол поворота снимка (угол между осью х и горизонталью).
Для определения положения точки снимка используется пространственная система координат SXYZ. Координаты точки а в этой системе будут XYZ.
Выразим пространственные координаты точки снимка через плоские. Для этого вводят вспомогательную систему координат Sxyz. Начало этой системы находится в центре проекции S, ось x параллельна оси x снимка, ось z параллельна оси z снимка, ось y совпадает с главным лучом So.
Координаты точки а в системе Sxyz будут
 (23)
(23)
Пространственные координаты XYZ будут равны
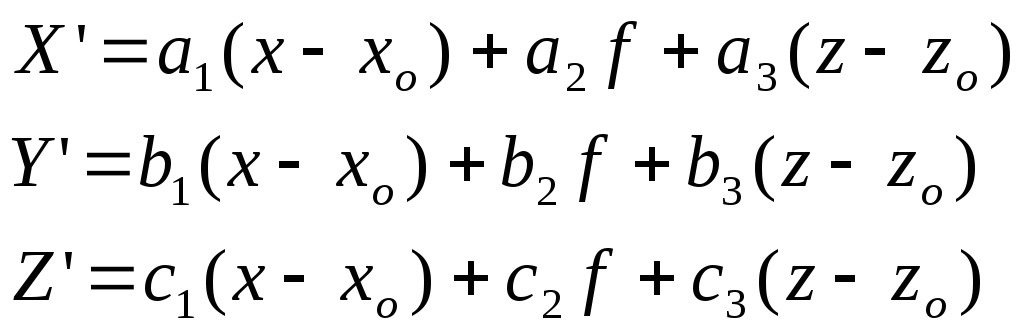 (24)
(24)
где аi. bi. ci - направляющие косинусы.
Направляющие косинусы вычисляют по формулам
![]()
![]()
![]()
![]()
![]() (25)
(25)
![]()
![]()
![]()
![]()
Если направляющие косинусы известны, то угловые элементы внешнего ориентирования снимка можно найти по формулам
![]() ,
,![]() ,
,![]() (26)
(26)
Осн.:1[50-52], 3[10-12]
Контрольные вопросы:
Что относится к элементам внутреннего ориентирования?
2. Что относится к элементам внешнего ориентирования?
Линейные элементы ориентирования.
Угловые элементы ориентирования
Формулы пространственных координат точки снимка.