

5 Результаты моделирования
В данном разделе описаны несколько критериев, по которым определялось качество рабочих характеристик ГГНС.
Основным критерием оценки качества работы системы является показатель эффективности, который представляет из себя отношение ошибок определения местоположения при работе только БИНС, к ошибкам ГГНС.
|
|
(16) |

5.1 Влияние рельефа
В условиях по умолчанию, грубый рельеф обеспечивает в 2-3 раза более высокую точность, нежели гладкий.
Рисунок 12 показывает преимущество грубого рельефа, уменьшающееся с увеличением высоты.
5.2 Влияние высоты полета
На рисунке 12 показано, как уменьшается точность работы ГГНС с увеличениями высоты. Скорость ослабления характеристики показывает уменьшение на значительных высотах, это подтверждает, что существует высота относительно уровней шума датчиков ГГНС, где эффектами рельефа можно было бы пренебречь. Высокочастотные данные, обеспеченные особенностями рельефа на низкой высоте, значительно улучшает работу ГГНС, но быстро уменьшаются с увеличением высоты.

Рисунок 12 – Влияние высоты и типа рельефа на показатель эффективности
5.3 Влияние скорости полета
Скорость полета не оказывает влияния на решения ГГНС, хотя шум имеет небольшие различия (рисунок 13). Показатель эффективности увеличивается при уменьшении скорости, но не из-за самой скорости, а из-за изменения расстояния между выработкой коррекции, т.е. при большей скорости полета, БИНС без поддержки дрейфовала бы дольше в течение моделирования.

Рисунок 13 – Влияние скорости на вероятное отклонение ГГНС, м
5.4 Влияние продолжительности полета
Продолжительность полета влияет только на показатель эффективности ГГНС. Даже притом, что решения для местоположения и неточности не были затронуты, более длинные полеты с лишённым поддержки БИНС приводят к большим погрешностям определения местоположения. Таким образом, показатель эффективности увеличивается с продолжительностью полета, потому что его точность растет относительно лишённой поддержки БИНС за большие периоды времени. В полете, при условиях по умолчанию, рисунок 14 показывает незначительный потенциал для использования ГГНС при продолжительности полета менее 30 мин., хороший потенциал от 30 мин. до 4 часов и превосходный потенциал при полетах более 4 часов.
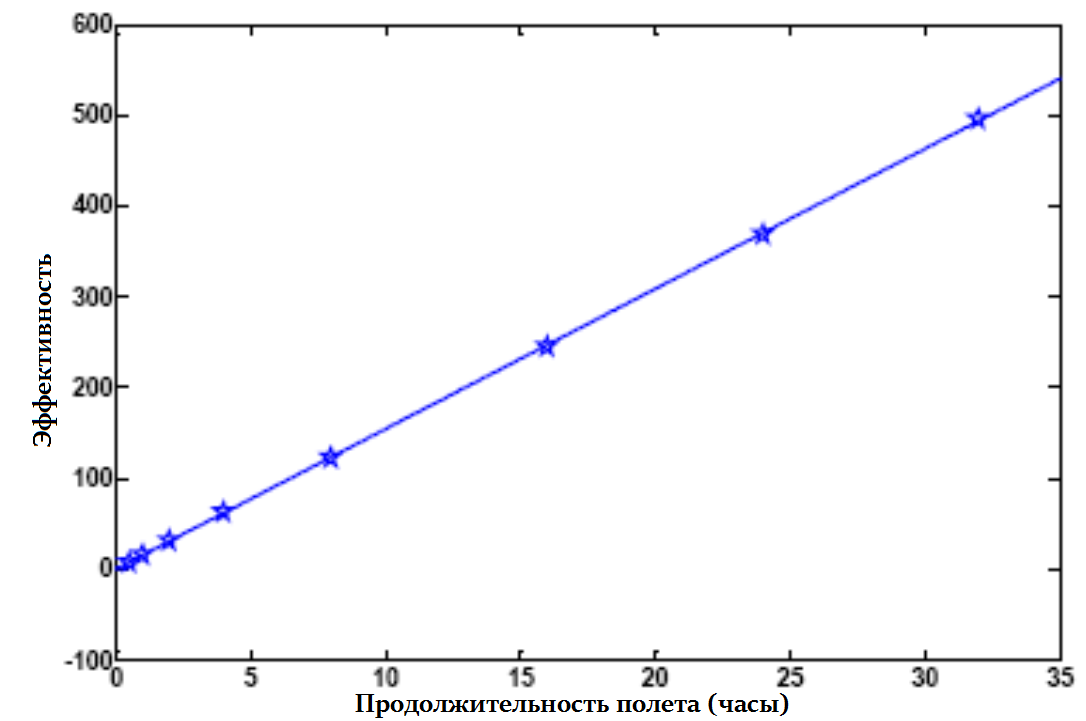
Рисунок 14 – Влияние продолжительности полета на показатель эффективности
5.5 Влияние скорости дрейфа бинс
Подобно продолжительности полета, большие скорости дрейфа БИНС увеличивают показатель эффективности ГГНС, даже при том, что решения о коррекции значительно не изменяются. Это означает, что использование ГГНС оправдано при работе с менее точной БИНС. Но, как ни странно, более точная БИНС улучшает точность ГГНС. В условиях полета по умолчанию и скорости дрейфа БИНС менее 300 м/час, использование ГГНС не даст значительных улучшений определения местоположения ЛА (рисунок 15). Но это не означает, что ГГНС нельзя использовать с высокоточной БИНС, для таких систем можно использовать более точные гравиградиентные карты, что может потенциально увеличить качество решений о коррекции ГГНС.
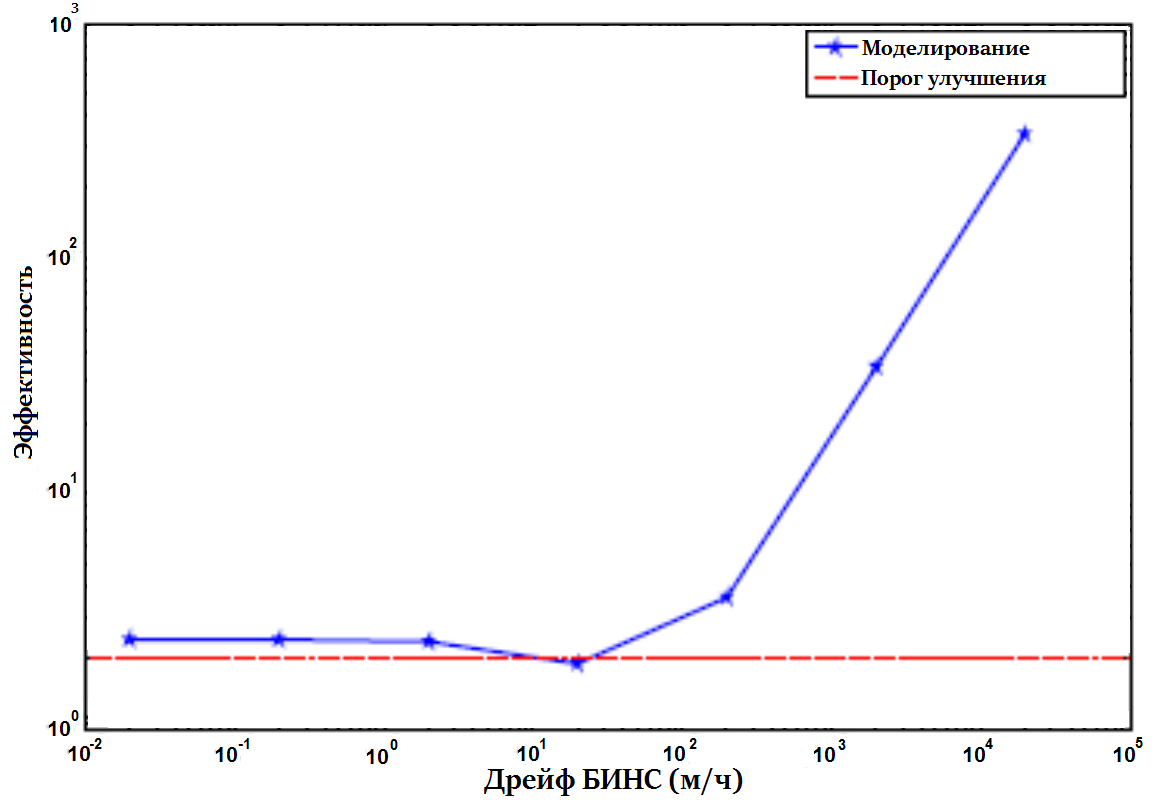
Рисунок 15 – Влияние скорости дрейфа БИНС на показатель эффективности
5.6 Влияние компонента тензора гравитации
Качество выполнения коррекции при использовании ГГНС увеличивается с увеличением числа компонентов тензора градиента гравитации, включенных в моделирование. Однако каждое следующее увеличение числа компонентов имеет следствием меньшее улучшение качества работы ГГНС (рисунок 16). Хотя использование пяти компонентов дает лучшие результаты, использование трех компонентов является более оптимальным, из соотношения быстродействие системы – качество коррекции.

Рисунок 16 – Влияние количества компонентов тензора гравитации на эффективность ГГНС
Данный конкретный анализ чувствительности также дает возможность проанализировать, какие компоненты приводят к лучшей работе. В соответствии с направлениями на север, восток, вниз системы координат, в таблице 2 представлены компоненты тензора гравитации в порядке их показателей эффективности для каждого из типов рельефов.
|
Таблица 2 – Лучшие комбинации компонентов тензора гравитации | ||
|
|
Грубый рельеф |
Гладкий рельеф |
|
1 компонент |
|
|
|
2 компонента |
|
|
|
3 компонента |
|
|
|
4 компонента |
|
|








ΓDD и ΓND оказывают наибольшее влияние на определение местоположения по грубому и гладкому рельефу, соответственно, в то время как ΓEE и ΓED – наименьшее. Относительный вклад каждого из компонентов убывает при сглаживании рельефа. Это показывает, что даже если один компонент мог бы приводить к более точным решениям для местоположения, связанные неточности могут оказаться выше.