

2 Гравитационно-градиентные приборы
Барон Роланд фон Этвёш, венгерский физик, ввел понятие прибора для успешного измерения градиента гравитации в 1890 году, когда он разработал и использовал крутильные весы для измерения малых градиентов силы тяжести, вызванных близлежащими сосредоточенными массами. Крутильные весы представляли градиент силы тяжести количеством поворотов тонкого провода, который был подвешен на металлическом коромысле с массой на каждом конце. Когда различные гравитационные силы действовали на массы, находящиеся на известном расстоянии, поворачивающая сила действовала на коромысло и скручивала тонкий провод.
Со временем, крутильные весы Этвёша обеспечили первое успешное измерение гравитационных градиентов и сделали измерения точных местоположений с большой чувствительностью.3
Рисунок 2 – Крутильные весы Этвёша
Прямое измерение Этвёшем гравитационных градиентов в точных местоположениях при помощи крутильных весов оставались непревзойденными много лет. Весы Этвёша имели точность ±3 Eö, В то время, как дифференцирование гравитационных градиентов для различных местоположений достигло точности гравитационного градиента ±10 Eö только в 1979 году. Понятие дифференцирования гравитационных измерений, измерение гравиметрами в различных местоположениях, обеспечивает фундаментальную иллюстрацию того, как работает современный гравитационно-градиентный прибор. Как показано на рисунке 3, два акселерометра выставлены в одном и том же направлении и отделены известным расстоянием, их измерения могут быть дифференцированы и затем разделены на разделяющее расстояние (зазор), чтобы получить гравитационный градиент. Совместимый с известным обозначением, первый нижний индекс обозначает направление выравнивания акселерометров, в то время как второй нижний индекс обозначает направление, в котором акселерометры отделены известным расстоянием.4
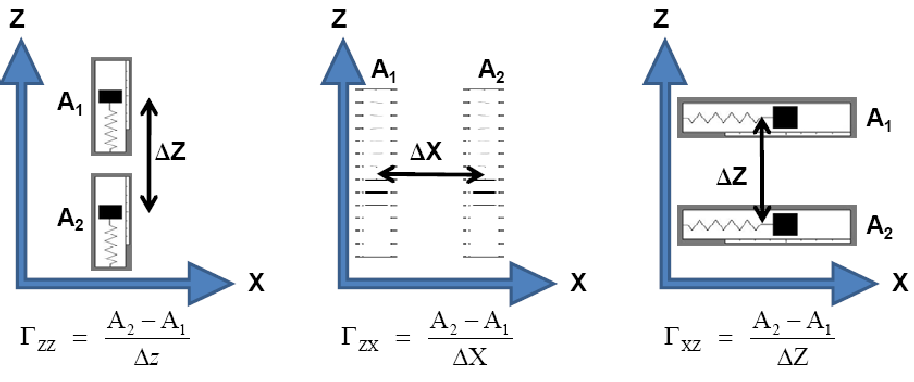
Рисунок 3 – Гравитационные градиенты, измеряемые акселерометрами
При использовании акселерометров, можно уравновесить силы, возникающие в процессе движения ЛА. Вообще, поступательные движущие силы ЛА нейтрализуются, когда два акселерометра прикрепляются к жесткой раме и их показания дифференцируются.
Примером ГГНС на основе акселерометров могут быть три градиентометра, установленные на устойчивой гиростабилизированной платформе. Каждый градиентометр включает в себя два акселерометра, расположенных на известном расстоянии друг от друга. Точность такой системы достигла 5 Eö и стимулировала применение ГГНС, прежде всего потому, что измерения градиента гравитации на движущихся платформах давали возможность быстрого и удобного сбора данных по всем видам рельефа и даже под водой (например, для автомобилей, самолетов, кораблей и субмарин).
На сегодняшний момент существуют и другие типы ГГНС, но только ГГНС на основе акселерометров успешно используется в аэробортовых съемках.
Базируясь на оценке точности текущих и разрабатываемых ГГНС, можно приблизительно определить технические характеристики систем такого типа в ближайшие 10 лет (таблица 1).
Таблица 1 – Приближенные характеристики работы современных и будущих ГГНС
|
ГГНС |
СПМ,
|
fs, Гц |
СКО шума, Eö |
fc, Гц |
СКО шума после фильтрации, Eö |
|
Настоящее |
2,23 |
1 |
1,58 |
0,2 |
1,0 |
|
Будущее |
0,223 |
1 |
0,158 |
0,2 |
0,1 |

Спектральная плотность мощности шума (СПМ) определяет уровень шума гравиградиентометров в предположении о нулевом среднем и Гауссовским распределением.
СКО шума, с учётом СПМ и частоты осуществления выборки fs:
|
|
(10) |
 .
.
Для уменьшения шумовых составляющих обычно применяют фильтр низких частот Баттерворта (Butterworth). В таблице 1 fc представлена частота отсечки низкочастотногого фильтра Баттерворта. При данной постоянной частоте отсечки, пространственная разрешающая способность данных гравиградиентометров будет увеличиваться с уменьшением скорости транспортного средства. И наоборот, пространственная разрешающая способность уменьшается при увеличении скорости. Увеличение частоты отсечки увеличивает пространственную разрешающую способность на более высоких скоростях, но увеличивается и шум, проходящий через фильтр. Если же частота отсечки устанавливается выше частот сигнала, проходящих через фильтр, то сигнал мог бы содержать частоты выше, чем частота Найквиста. В этом случае, произошло бы замещение, где частота выборки недостаточно высока, т.е. способность захватить спектр частоты сигнала была бы потеряна.4
|
|
(11) |
