

Т4 Управление в ДС
.pdfT4. УПРАВЛЕНИЕ В ДИНАМИЧЕСКИХ СИСТЕМАХ
4.1. Многоуровневая организация управления
Рассмотрение вопросов управления в сложных системах требует использования определенного принципа систематизации, который позволил бы регулярным образом выделить и упорядочить соответствующие задачи. В общем случае выбор принципа систематизации является неоднозначным. Так в очерке 3 настоящей работы в качестве подобного принципа было принято последовательное развитие базовых представлений при решении задач управления. При решении практических задач приведенная схема подлежит конкретизации в зависимости от специфики решаемых задач. Для сложных систем конкретизация должна основываться на учете их структурных особенностей, которые в общем случае могут иметь многоуровневый, многослойный, стратифицированный или иной характер. Поэтому базовую схему решения задач (очерк 3) можно рассматривать как типовой модуль, итеративно используемый в различных структурных планах сложной системы.
В качестве примера остановимся в этой связи на рассмотрении типовой иерархии управления производственными процессами.
Использование указанной иерархии управления является представительным, так как в производственных системах, понимаемых в широком смысле, в настоящее время находят свою наиболее полную реализацию современные методы управления сложными процессами.
Под производственными процессами в дальнейшем будем понимать процессы выработки определенной продукции, исходя из заданных ресурсов. Составляющими производственных процессов являются частные технологические процессы, реализуемые отдельными технологическими установками. Сами технологические процессы имеют сложную структуру и включают в себя локальные составляющие процессы. Таким образом, при рассмотрении производственных процессов будем выделять три уровня иерархии: глобальный производственный процесс, частные технологические процессы, локальные составляющие процессы в технологических установках.
С системной точки зрения решение задач управления производственными процессами необходимо осуществлять оптимально по заданным критериям эффективности. Успех оптимального управления сложными производственными процессами непосредственно зависит от согласованного решения отдельных задач управления на различных
318
уровнях иерархии. В общем случае здесь можно выделить следующую иерархию управления:
Уровень 3. Оптимальное планирование, оперативное управление и диспетчеризация производственных процессов во времени и пространстве по критериям производственной эффективности.
Уровень 2. Оптимизация режимов технологических процессов по критериям технико-экономической эффективности.
Уровень 1. Управление режимами технологических процессов по критериям динамической эффективности.
Уровень 0. Локальное регулирование составляющих процессов в технологических объектах по критериям качества регулирования.
Рассмотрим более подробно задачи управления на каждом уровне. На локальном уровне (0) составляющими процессами являются,
например, локальные процессы регулирования исполнительных механизмов, клапанов, заслонок и другой запорно-регулирующей арматуры, регулирование подачи различных материалов, технологических жидкостей, газов. Сюда можно отнести также сепаратные каналы регулирования отдельных режимных параметров, например, температуры, давления и др. На данном уровне, как правило, используются локальные контуры автоматического регулирования. В качестве показателей качества регулирования используются инженерные критерии, например, для оценки качества переходных процессов на ступенчатое воздействие используются показатели - время регулирования, перерегулирование, статическая точность регулирования. Теоретической основой построения данных систем обычно является классическая теория автоматического регулирования. Обеспечение качества процессов регулирования на данном уровне является основой достижения оптимальных значений показателей динамической эффективности в задачах управления в целом.
При рассмотрении систем автоматического управления (уровень 1)
в качестве задания принимаются оптимальные значения режимных параметров процессов, которые передаются с вышестоящего уровня.
Основная задача здесь - удержание с заданной точностью требуемых значений режимных параметров процесса в целом при воздействии возмущающих факторов. Для этого задача управления должна решаться в общем случае как многомерная многосвязная задача, чтобы учесть в полной мере динамические особенности объекта управления. Эффективность решения указанной задачи определяется противоречивыми требованиями динамической точности и сложности управления.
Противоречивый характер взаимосвязи динамической точности и сложности управления был детально рассмотрен ранее в разделе 3.4.2 очерка 3. Здесь необходимо отметить, что с ростом точности управления повышается его сложность, а это приводит к неустойчивости решения по
319
отношению к возмущающим факторам. Поэтому задача оптимизации управления на данном уровне должна решаться на основе компромисса между точностью и сложностью управления. Кроме того, необходимо учитывать, что с ростом точности управления растет техникоэкономическая эффективность технологического процесса. Дело в том, что оптимальные значения режимных параметров часто находятся на границах областей допустимых значений в крайних режимах. В этих случаях чем более точно удерживаются параметры в крайних режимах, тем выше технико-экономический эффект технологического процесса. Для решения данной задачи можно использовать классическую теорию автоматического управления, теорию оптимального управления и современную теорию модельно-упреждающего управления с
динамическим горизонтом планирования.
На 2-ом уровне процессов управления осуществляется оптимизация режимов технологического оборудования по технико-экономическим критериям. Данная задача может решаться в статическом и динамическом вариантах. В статическом варианте задача оптимизации, например,
решается при проведении наладки и настройки технологического оборудования на основе натурных испытаний. Из математического аппарата здесь могут быть использованы методы построения эмпирических зависимостей и методы экспериментальной оптимизации.
В результате будут получены эмпирические зависимости, описывающие области оптимальных решений в координатах режимных параметров. Форма представления эмпирических зависимостей может быть самой разнообразной - это могут быть карты рабочих режимов, номограммы режимов, аналитические выражения. В динамическом варианте задача оптимизации режимов решается в реальном времени с использованием методов автоматической оптимизации и адаптивного управления.
Указанные методы были рассмотрены ранее в разделах 3.6.1, 3.6.4 очерка
3.
Режимы работы технологического оборудования непосредственно зависят от производственного задания, которое формулируется на 3-ем уровне управления. Производственные задания могут формулироваться как в статическом, так и динамическом вариантах. В статическом варианте оптимальное производственное задание формулируется на основе решения задач исследования операций. Общая методология решения задач исследования операций была рассмотрена в разделе 3.3 очерка 3 данной работы. В динамическом варианте в зависимости от текущей производственной ситуации решаются задачи оперативного управления и диспетчеризации производственных процессов. В технико-экономическом плане решение данной задачи с использованием метода ограничений было приведено в разделе 3.6.5 очерка 3.
320
Все решения рассмотренных выше задач должны быть согласованы между собой. Согласование между локальным 0-ым и 1-ым уровнем осуществляется естественно, если на 1-ом уровне рассматривать контуры управления 0-го уровня как частные динамические процессы, входящие в состав общего многомерного и многосвязного динамического процесса 1- го уровня. В этом случае модельные представления процессов являются однотипными и представляют собой, как правило, автоматические системы. Аналогично процессы управления 2-го уровня в статическом варианте дополняют данную автоматическую систему специальной функцией задания режимных параметров. В динамическом варианте указанные процессы дополняют автоматическую систему контуром
адаптивного управления (см. раздел 3.6.4 очерка 3). Что касается процессов 3-го уровня - оптимального планирования и диспетчеризации производственных процессов, то они существенно отличаются от процессов на нижних уровнях. Процессы планирования и диспетчеризации 3-го уровня можно обобщенно интерпретировать как деятельность по
целевому управлению производственными процессами. Динамика указанных процессов может быть описана, например, в виде моделей
динамических систем с дискретными событиями.
Все перечисленные выше задачи управления на каждом уровне могут решаться также в многоуровневой постановке. В итоге задачи управления в общем случае имеют сложный многоуровневый характер с итерационной структурой, где каждый уровень содержит вложенные подуровни.
Исходя из сказанного, рассматриваемая иерархия процессов управления может быть наглядно представлена, например, иерархической схемой контуров управления (рис. 4.1.1).
321
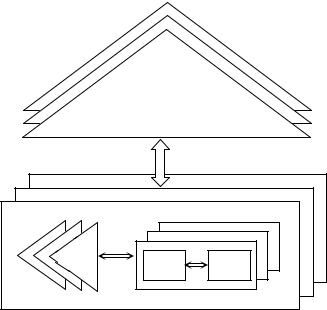
П У
С |
R |
O |
|
Рис. 4.1.1. Иерархия контуров управления
Здесь R - регуляторы, образующие локальные контуры регулирования; C - контроллеры, образующие контуры многомерного и многосвязного управления технологическими процессами; П У - подсистемы планирования и управления производственными процессами.
Рассматриваемая иерархия процессов управления, как правило, характеризуется не только различными целями и задачами управления на соответствующих уровнях, но и разными темпами решения задач во времени. Так, в типовых случаях процессы регулирования измеряются обычно в секундах, процессы управления технологическими объектами - в минутах и часах, управление производственными процессами - в часах, сутках. Соответственно модельные представления процессов на каждом уровне будут различными, различаются и методы решения задач.
______________________________
В данном очерке приводится обзор ряда типовых задач, которые конкретизируют общие принципы методологии управления применительно к динамическим системам. В этой связи здесь раскрываются следующие вопросы управления в динамических системах.
Вводный п. 4.2 содержит общие сведения о динамике процессов. В п. 4.3 рассматриваются вопросы фильтрации сигналов и построения наблюдателей состояния на фоне помех. В п. 4.4 освещается ряд типовых схем управления на основе использования методов классической теории управления. В п. 4.5 рассматриваются методы оптимального управления. В п. 4.6 раскрываются алгоритмы модельно-упреждающего управления.
322

Заключительный п. 4.7 посвящен вопросам самоорганизации в нелинейных системах.
Данный очерк не претендует в той или иной степени на полное изложение методов теории управления в динамических системах, так как подобная задача является необозримой. Целью очерка является освещение системных аспектов методологии управления на основе краткого обзора типовых задач.
4.2 Фильтрация сигналов на фоне помех
Методы управления динамическими системами существенно базируются на построении фильтров, осуществляющих преобразование сигналов на фоне шумов в соответствии с заданным законом. В настоящее время разработано множество подходов к решению указанных задач. Ниже будут рассмотрены методы экспоненциальной фильтрации и наблюдатели состояния динамических систем, часто используемые при построении систем управления.
4.2.1. Экспоненциальная фильтрация
Рассмотрим задачу построения в реальном времени спектра сигнала, составленного из проекций сигнала в некоторой системе базисных функций.
В общем случае указанная задача формулируется как задача разложения сигнала в ряд
|
n |
|
|
|
|
|
|
y(t ) ai (t) i ( ) , |
|
|
|
(1.1) |
|
|
i 0 |
|
|
|
|
|
где i ( ) - базисные функции; |
|
|
|
|
|
|
ai (t) - спектральные составляющие. |
|
|
|
|
|
|
Ошибка разложения (1.1) |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
ey (t ) y(t ) ai (t) i ( ) . |
|
|
|
(1.2) |
|
|
i 0 |
|
|
|
|
|
Определим экспоненциально-среднюю ошибку разложения (1.1) |
||||||
|
|
|
n |
|
|
2 |
|
|
|||||
Ey2 (t) cф e2y (t ) exp( cф )d cф |
ai |
(t) i |
|
|||
y(t ) |
( ) e cф d . |
|||||
0 |
0 |
|
i 0 |
|
|
|
|
|
|
|
|
|
(1.3) |
Здесь параметр cф |
играет роль показателя старения данных, обратная |
|||||
величина ф 1 cф |
имеет смысл постоянной времени фильтра первого |
|||||
порядка, на основе которого усредняется величина квадрата ошибки.
323
|
Ставится |
задача: |
|
определить |
неизвестные |
спектральные |
||||||||||
составляющие {ai (t)} |
сигнала |
|
y(t) из условия минимума |
|||||||||||||
экспоненциально-средней квадратичной ошибки (3): |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
min E2 |
(t) . |
|
|
|
|||
|
|
|
|
|
|
|
|
|
{ai (t )} |
y |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Необходимые условия минимума квадратичной функции (1.3) |
|||||||||||||||
|
E |
2 |
(t) |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
y |
2c |
|
|
y(t ) |
|
a |
(t) |
|
( ) |
( )e cф d , |
i 0, 1, 2, ..., n . |
|||
|
|
|
|
j |
||||||||||||
|
ai |
ф |
|
|
j |
|
|
i |
|
|
||||||
|
|
0 |
|
|
|
j 0 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.4) |
Система соотношений (1.4) представляет собой систему линейных алгебраических уравнений относительно неизвестных {ai (t)}:
n |
|
|
|
pij a j (t) i (t) , |
i 0, 1, 2, ..., n . |
(1.5) |
|
j 0 |
|
|
|
Здесь pij - базовые корреляционные коэффициенты, |
|
||
|
i 0, 1, 2, . . . , n ; |
j 0, 1, 2, ..., n . |
|
pij cф i ( ) j ( )e cф d ; |
|||
0 |
|
|
|
|
|
|
(1.6) |
Величины i (t) являются моментами i -го порядка сигнала y(t) : |
|||
|
|
i 0, 1, 2, ..., n . |
|
i (t) cф y(t ) i ( )e cф d ; |
(1.7) |
||
0 |
|
|
|
Запишем уравнения
где
|
p00 |
p01 |
|
|
p |
|
p |
P |
10 |
11 |
|
p |
|
p |
|
|
20 |
||
|
|
21 |
|
|
p |
|
p |
|
|
n0 |
n1 |
(1.5) в матричном виде
Pa(t) μ (t) ,
p |
p |
|
|
|
02 |
on |
|
|
|
p12 |
p1n |
, |
a(t) |
|
p |
p |
|
|
|
22 |
2n |
|
|
|
pn 2 |
|
|
|
|
pnn |
|
|
||
a0 (t)a1 (t) ,
a2 (t)
an (t)
(1.8)
|
0 (t) |
||
|
(t) |
||
μ (t) |
1 |
. |
|
|
2 |
(t) |
|
|
|
|
|
|
|
||
|
|
(t) |
|
|
|
n |
|
Формальное решение уравнения (1.5):
a(t) P 1 μ (t) ,
определяет базовую вычислительную формулу для анализатора спектра.
Таким образом, оптимальный анализатор спектра характеризуется матрицей корреляционных коэффициентов P , определяемой выбранной системой базисных функций { i ( )}. Процедура анализа состоит в
вычислении моментов (1.7) анализируемого сигнала y(t) с последующими вычислениями по формуле (1.9). Число анализируемых составляющих - (n 1) , где n - порядок анализатора.
324

В случае использования в анализаторе спектра ортогональной системы базисных функций { i ( )}, для которых выполняется условие
ортогональности
|
pij 0, |
i, j (i j) , |
|
формула анализатора (9) предельно упрощается: |
|
||
a (t) p 1 (t) , |
i 0, 1, 2, ..., n . |
(1.10) |
|
i |
ii i |
|
|
_____________________________
Рассмотрим вариант построения анализатора спектра на основе степенных функций1.
Предположим, что задано базисное множество степенных функций:
{1, , 2 , ..., n }. |
(1.11) |
Для построения анализатора спектра необходимо вычислить корреляцонные коэффициенты базисных функций в соответствии с соотношениями (1.7):
|
(i j)! |
|
(i, j) . |
|
|
pij cф i j e cф d |
, |
(1.12) |
|||
|
|||||
(i j ) |
|||||
0 |
cф |
|
|
|
Далее, соответствующие моменты входного сигнала будут равны
|
|
|
i (t) cф y(t ) i e cф d , |
i . |
(1.13) |
0 |
|
|
Произведем замену переменных в соотношении (1.13): |
|
|
t . |
|
|
Тогда выражение моментов входного сигнала (1.13) может быть представлено в другом эквивалентном виде
t |
|
|
i (t) cф y( )(t )i e cф (t )d , |
i . |
(1.14) |
|
|
|
Дифференцируя выражение (1.14) по времени t , получим систему дифференциальных уравнений
1 Казаринов, Л.С. Прогнозирование случайных колебательных процессов на основе метода экспоненциального сглаживания / Л.С. Казаринов, С.И. Горелик // Автоматика и телемеханика, РАН. – 1994. – №10. – С. 27–34.
Казаринов, Л.С. Оценка положения и скорости летательного аппарата на основе метода экспоненциального сглаживания результатов траекторных измерений / Л.С. Казаринов, С.И. Горелик // Известия РАН. Техническая кибернетика. – 1994. – №6.
– С. 83 – 94.
Казаринов, Л.С. Построение наблюдений состояния динамических систем на основе аппроксимирующих фильтров / Л.С. Казаринов, А.Е. Гудилин // Программное обеспечение. Микропроцессорная техника сложных автоматических систем и их устройства: сб. науч. тр. – Челябинск: ЧГТУ, 1995. – С. 46 – 49.
325
|
c |
|
c y, |
|
|
|
|
0 |
ф |
0 |
ф |
|
(1.15) |
|
|
cф i |
i i 1; |
|
||
i |
i 1, 2, . . . , n. |
|
||||
|
|
|
|
|
|
|
Система дифференциальных уравнений (1.15) описывает фильтр, формирующий на своем выходе моменты i (t) входного сигнала y(t) . В
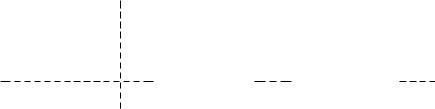
совокупности соотношения (1.9), (1.12), (1.15) описывают работу анализатора спектра в базисе степенных функций. Структура анализатора спектра представлена на рис. 4.2.1.
y(t) |
|
|
|
μ |
|
|
|
a(t) |
|
Фμ |
|
|
P 1 |
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.2.1. Структура анализатора спектра.
Здесь Фμ – формирующий фильтр моментов входного сигнала, P 1 - обратная матрица коэффициентов корреляции.
Построим уравнения формирующего фильтра (1.15) в дискретном виде. С этой целью воспользуемся процедурой дискретизации дифференциальных уравнений по неявному методу Эйлера.
Как известно, неявный метод Эйлера основывается на следующем
дискретном представлении дифференциальных уравнений: |
|
|||
f ( , t) |
k k 1 |
f ( k , tk ) , |
(1.16) |
|
t |
||||
|
|
|
||
где k - шаг интегрирования.
С использованием соотношения (1.16) систему дифференциальных
уравнений (1.15) |
|
|
можно преобразовать в систему разностных уравнений |
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
cф t |
|
|
|
|
|
0,k |
|
|
|
|
|
0,k 1 |
|
|
|
|
yk |
, |
|
|
|
1 cф t |
|
cф t |
|
|
|||||||||||
|
|
|
1 |
|
|
|
(1.17) |
||||||||
|
|
|
|
1 |
|
|
|
|
|
i t |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i,k |
|
1 cф t |
i,k 1 |
|
|
|
|
i 1,k ; |
i 1, 2, . . . , n. |
|
|||||
|
|
|
1 cф t |
|
|
|
|
||||||||
Система разностных уравнений (1.17) определяет дискретный |
|||||||||||||||
формирующий фильтр - анализатор спектра. |
|
|
|||||||||||||
Рассмотрим |
статистическую |
|
интерпретацию |
построенного |
|||||||||||
анализатора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С этой |
целью обратим |
внимание, |
что произведение cф t в |
||||||||||||
соотношениях (1.17) имеет смысл числа, обратного текущему числу статистических наблюдений:
326
c t t |
|
1 |
, |
(1.18) |
|
|
|||||
ф |
ф |
|
n ф |
|
|
|
|
|
|||
где ф - постоянная времени фильтра,
nф - число статистических наблюдений, содержащихся в интервале времени, равном постоянной времени ф , при дискретизации наблюдений с шагом t .
Сучетом (1.18) первое уравнение системы (1.17) можно представить
ввиде
|
nф |
|
1 |
|
||
0,k |
|
|
0,k |
|
|
yk . |
n 1 |
n 1 |
|||||
|
ф |
|
|
ф |
||
С другой стороны, текущее статистическое среднее величины
|
1 |
|
k |
|
||
ykср |
|
yk |
, |
|||
|
|
|
||||
n |
1 |
|||||
|
k nф |
|
||||
|
ф |
|
|
|
||
в рекуррентной форме совпадает с выражением (1.19):
|
|
|
n |
|
|
|
|
1 |
|
|
|
|
||
yср |
|
|
ф |
|
yср |
+ |
|
|
|
y |
|
. |
||
|
|
1 |
|
1 |
|
|||||||||
k |
|
n |
|
|
k 1 |
|
n |
|
k |
|
||||
|
|
ф |
|
|
|
|
|
ф |
|
|
|
|||
Таким образом |
|
yср . |
|
Аналогичные рассуждения |
||||||||||
|
0,k |
|
k |
|
|
|
|
|
|
|
|
|
||
(1.19)
xk :
(1.20)
(1.21)
можно
провести и для остальных уравнений системы (1.17). В итоге можно показать, что анализатор спектра, построенный в соответствии с соотношениями (1.11), (1.12), (1.17), эквивалентен текущей аппроксимации процесса yk полиномом:
n |
|
|
yl aik tli , |
l [k nф , k] ; |
(1.22) |
i 0
обычным методом наименьших квадратов.
Далее, можно показать, что построенный анализатор спектра эквивалентен наблюдателю переменных состояний динамической системы.
Действительно, рассмотрим текущее разложение сигнала x(t) в ряд Тэйлора
n |
|
y |
(i ) |
(t) |
|
|
|
y(t ) ( 1)i |
|
|
i , |
(1.23) |
|||
|
|
|
|
||||
i 0 |
|
|
i! |
|
|||
где y(i ) (t) - i -ая производная сигнала у(t) . |
|
||||||
Сравнение выражений (1.1), (1.11), и (1.23) позволяет определить |
|||||||
равенства |
|
|
|
|
|
|
|
a (t) ( 1)i |
y(i ) (t) |
, i |
|
||||
|
|
||||||
i |
i! |
|
|
откуда |
|
|
327 |