

9. Динамічні рекурсивні шнм
Відмінність розглянутих у цьому розділі мереж від мереж Гопфіл- да (розділ 6) полягає в такому:
Рекурсивна мережа може мати кілька шарів.
Нейрони можуть мати власні зворотні зв’язки

Матриця ваг може бути несиметричною.
Може здійснюватися контрольоване навчання шляхом використання алгоритму зворотного поширення.
Наявність зворотних зв’язків між нейронами різних шарів, включаючи й нейрони вихідного шару, забезпечує динамічним рекурсивним мережам (ДРМ) додаткові позитивні властивості, які не можуть бути досягнуті в статичних багатошарових мережах прямого поширення. До таких властивостей відноситься, наприклад, можливість роботи з образами, параметри яких змінюються в часі.
9.1. Структура дрм
Структуру деякої ДРМ зображено на рис. 9.1.
У даній мережі вихідними нейронами можуть бути будь-які (наприклад, на рис. 9.1 один нейрон прихованого шару є також вихідним).
Сигнали,
що надходять на входи нейронів вхідного
шару в певний момент часу t
> 0, перетворяться останніми за допомогою
відповідних функцій активації
 і
в наступний момент часу передаються по
наявних зв’язках нейронам, які їх також
перетворять. Далі перетворений сигнал
по прямих і зворотних зв’язках надходить
на входи нейронів і процес повторюється.
Наявність зворотних зв’язків призводить
до того, що залежно від значень вхідного
сигналу й вагових параметрів мережа
може:
і
в наступний момент часу передаються по
наявних зв’язках нейронам, які їх також
перетворять. Далі перетворений сигнал
по прямих і зворотних зв’язках надходить
на входи нейронів і процес повторюється.
Наявність зворотних зв’язків призводить
до того, що залежно від значень вхідного
сигналу й вагових параметрів мережа
може:
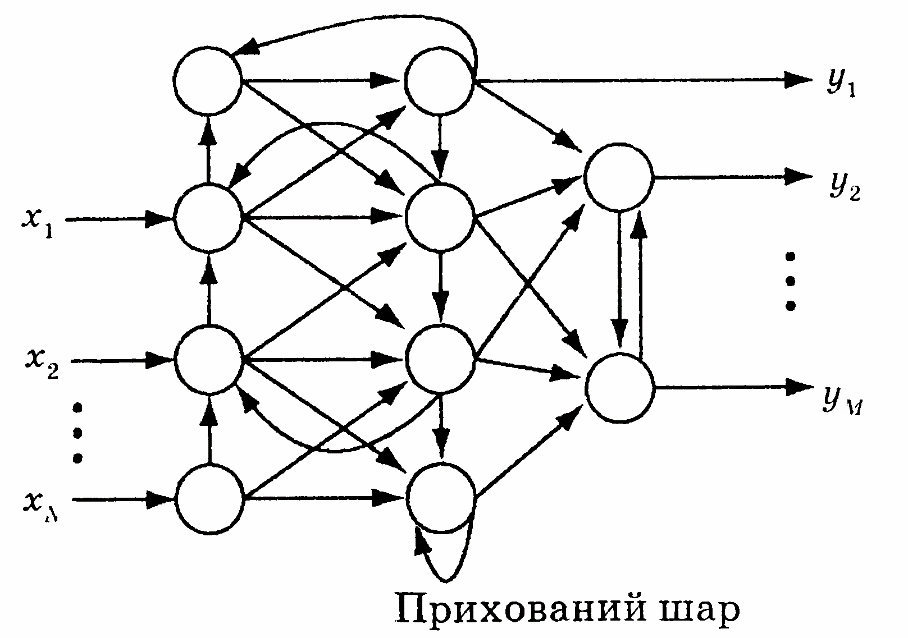
Рис. 9.1. Приклад структури ДРМ
а) досягти деякого стійкого стану;
б) осцилювати, тобто періодично повторювати значення вихідних сигналів;
в) хаотично змінювати свій стан.
Отже, динаміка ДРМ аналогічна динаміці мережі Гопфілда (див. розділ 6).
Наявність зворотних зв’язків у цій мережі не дозволяє використовувати для її опису настільки прості співвідношення, які застосовувалися в розглянутих раніше мережах. Тому їхня динаміка, як і динаміка мереж Гопфілда, що є окремим випадком ДРМ, описується нелінійними диференціальними (у неперервному випадку) або різницевими (у дискретному випадку) рівняннями першого порядку.
Властивості ДРМ вивчалися в роботах [89-93].
9.2. Неперервні дрм
Динаміка і-го нейрона неперервної ДРМ описується рівняннями, аналогічними рівнянню (6.17):

де
 —
стала часуі-го
нейрона;
—
стала часуі-го
нейрона;
 — стані-го
нейрона в момент часу t;
— стані-го
нейрона в момент часу t;
 — нелінійна функція активації;
— нелінійна функція активації; — зовнішній вхідний сигналі-го
нейрона; L
— кількість нейронів у мережі.
— зовнішній вхідний сигналі-го
нейрона; L
— кількість нейронів у мережі.
Елементи
 вагової матриці визначаються
W
визначаються шляхом
розв’язання рівнянь
вагової матриці визначаються
W
визначаються шляхом
розв’язання рівнянь
Залежно від виду матриці W розрізнюють три типи мереж:
симетрична матриця ваг з нульовими діагональними елементами, що описує ДРМ типу мережі Гопфілда;
трикутна матриця W, що характеризує ДРМ прямого поширення без зворотних зв’язків;
вагова матриця довільного виду, що характеризує ДРМ загального виду.
В
останньому випадку мережа залежно від
значень ЇЇ параметрів може або
досягати деякого стійкого стану, або
осцилювати, або хаотично змінювати свій
стан. Зокрема, для досягнення стійкого
стану вагові коефіцієнти
 мають задовольняти такій умові:
мають задовольняти такій умові:
де
 похідна
функції активації.
похідна
функції активації.