

как правило, в состав программных средств, поставляемой изготовителем микропроцессорной техники.
Кроме этого, разработчики микропроцессорной техники для средств контроля и управления поставляют эмуляторы – комплекс программных средств, позволяющих в среде мощных ЭВМ воспроизводить и отлаживать образы (модели) реальных модулей ИУВС нужной архитектуры.
Более развитые микропроцессорные модули ИУВС содержат в ПЗУ микроЭВМ программу отладчика (программу-монитор), которые позволяют отлаживать программу функционирования ИУВС в среде реальных технических средств, а не их образов.
Широко используются для программирования работы узлов ИУВС и языки высокого уровня: TurboPascal, Visual-C и тому подобное. Эти языки позволяют, например, составить удобный графический многооконный интерфейс для оператора, что весьма затруднительно сделать на ассемблере, хотя программы, написанные на ассемблере, являются самыми компактными.
Другим средством для написания программ функционирования узла ИУВС является интерпретатор – простейший язык программирования, не требующий специальных знаний и навыков в области программирования. В отличие от компилятора, который просто преобразует всю программу в последовательность машинных кодов, интерпретатор транслирует и выполняет исходную программу, написанную на языке интерпретатора, но по одной командной строке. Благодаря таким особенностям интерпретатора существенно облегчается написание и отладка программы, в нее легко вносить изменения и дополнения.
3.2 Структуры микропроцессорных ИУВС
Рассмотрим структуру типовой централизованной микропроцессорной ИУВС на примере реально существующих ИУВС на основе микроЭВМ (рисунок 3.2).
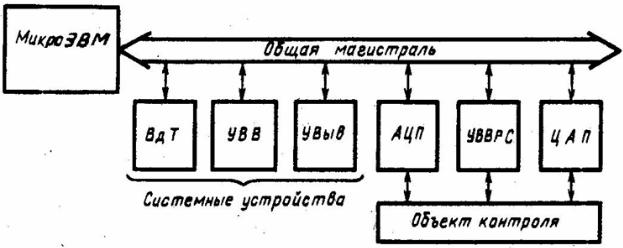
Рисунок 3.2 – Схема ИУВС на базе микроЭВМ с общей магистралью
Поскольку система централизованная, то она должна предусматривать рабочее место оператора, то есть должна иметь технические средства ввода команд и вывода информации о состоянии контролируемого объекта.
На рисунке 3.2 представлена структура ИУВС, где ВдТ — видеотерминал: дисплей на электронно-лучевой трубке и клавиатура;
УВВ — устройство ввода-вывода на магнитный носитель; УВыв — устройство вывода на печать;
АЦП — узел аналого-цифровых преобразователей (преобразование входных измерительных аналоговых сигналов);
УВВ РС — устройство ввода и вывода релейных сигналов; ЦАП – узел цифроаналоговых преобразователей (преобразование выходных
аналоговых сигналов-воздействий).
Анализ этой схемы по отношению к схемам, приведенным на рисунке 2.2, показывает, что структура СОД соответствует структуре на рисунке 2.2а, причем роль цифрового мультиплексора (коммутатора каналов ввода информации и вывода выходных воздействий) выполняет общая магистраль посредством адресации.
Связь между устройствами, соединенными общей магистралью, осуществляется по принципу «активный – пассивный» (ведущий – ведомый). В любой момент времени имеется только одно устройство, которое управляет магистралью и носит название «активный». Это устройство управляет работой магистрали при осуществлении связи с другим устройством, соединенным с магистралью и именуемым «пассивный». По умолчанию активным является процессор ЦП.
В настоящее время децентрализованные микропроцессорные ИУВС составляют наиболее многочисленный класс систем контроля и управления. В общем случае архитектура типового модуля децентрализованной
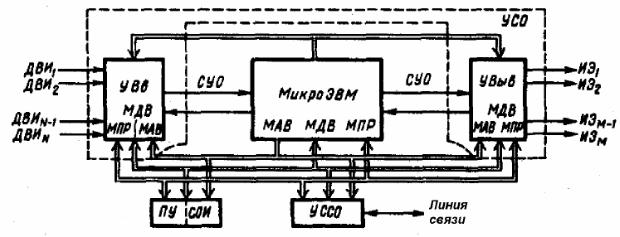
микропроцессорной ИУВС, являющегося связующим звеном между частью контролируемого сложного (рассредоточенного) объекта и центральным пунктом управления, имеет вид, представленный на рисунке 3.3.
Рисунок 3.3. Структура децентрализованной микропроцессорной ИУВС
Всостав модуля децентрализованной микропроцессорной ИУВС входят:
-микроЭВМ с системной магистралью Multi-bus (разделенные магистралями адреса МА и данных МД и радиальной магистралью управления /2/, в том числе: магистраль прерываний МПР и магистраль стробов управления обменом (стробы записи и чтения) СУО;
-устройство сопряжения с объектом УСО (на рисунке структурно выделены части УСО для ввода – УВв и вывода – УВыв);
-пульт управления ПУ с минимальной системой отображения информации СОИ (предназначено для контроля и наладки модуля ИУВС);
-устройство сопряжения с сетевым окружением УССО (определяется видом линии связи с центральным пунктом управления: телефонная или коаксиальная проводная связь, оптоволоконная связь, радиосвязь)
Принадлежностью системы можно считать также датчики входной информации ДВИi и исполнительные элементы ИЭj, поскольку их параметры
учитываются в УСО, в связи с чем они в целом составляют структуру СОД (рисунок 2.2).
МикроЭВМ выполняет заданные резидентной программой, которая «зашита» в ПЗУ, преобразования информации и управляет работой всех составных частей ИУВС. В процессе работы микроЭВМ опрашивает состояние органов управления и задания режимов (тумблеры, переключатели) на пульте управления ПУ, и в зависимости от их положения реализует тот или иной режим функционирования модуля ИУВС. Взаимодействие микроЭВМ с УСО, ПУ, СОИ и УССО осуществляется по внешним магистралям адреса МАВ, данных МДВ, прерывания МПР, составляющих общую магистраль. Для опроса
требуемой в данный момент времени информации на магистрали МА микроЭВМ устанавливается адрес источника информации. Такими источниками могут быть тумблер ПУ, один из каналов ввода УСО, приемник УССО. В источнике информации определяется соответствие его номера адресу и обеспечивается выдача информации по магистрали МДВ. Аналогично осуществляется вывод информации.
В подавляющих случаях инициатором обмена является микроЭВМ, то есть ее основная (резидентная) программа. Вместе с тем, с целью уменьше-ния времени ожидания системы на изменения состояния объекта управления, УСО, ПУ и СОИ могут формировать запросы на прерывание работы в текущем режиме и временный (оперативный) переход к обработке новой информации. Для этого в ИУВС предусматривается магистраль прерывания МПР.
Для современного этапа развития ИУВС характерен переход от ИУВС с одним микропроцессором к мультимикропроцессорным ИУВС (mМП ИУВС), в которых сложнейшие задачи управления выполняются одновременно множеством микропроцессоров (рис.3.4.). Интерес к созданию управляющих и вычислительных систем, получаемых соединением в сложную структуру большого числа микропроцессоров, запоминающих устройств, устройств вводавывода информации, то есть к mМП ИУВС, обусловлен:
1)необходимостью создания высокопроизводительных ИУВС с эквивалентным быстродействием в десятки и сотни миллионов операций в секунду, например для анализа и прогнозирования погоды, распознавания образов, систем автоматизированного проектирования, решения задач обработки сигналов и сопровождения целей в военной технике и тому подобное;
2)требованием обеспечения живучести ИУВС, работающих в режиме реального времени, то есть необходимостью создания ИУВС, способных продолжить работу при выходе из строя отдельных их устройств;
3)территориальной удаленностью на десятки, сотни и тысячи метров элементов систем управления и сбора информации, включающих вычислительные средства;
4)необходимостью в большинстве случаев коммутации вычислительной мощности, ее динамическим перераспределением в зависимости от динамики решаемых задач;
5)необходимостью адаптации ИУВС к внешним условиям, а не наоборот;
6)требованием достижения гибкости вычислительных средств, то есть возможности изменения конфигурации, расширяемости и модульности структуры;
7)потребностью в повышении производительности самих микропроцессоров, поскольку они не могут конкурировать со сверхбыст-
родействующими ЭВМ; 8) низкой стоимостью элементной базы (БИС микропроцессорных
наборов, ОЗУ, ПЗУ, ППЗУ, УВВ), обладающей достаточно большими вычислительными возможностями.
Успех широкого применения mМП ИУВС связан:
-с разработкой архитектуры (структурной организации) и системного программного обеспечения;
-с созданием параллельных алгоритмов решения задачи и соответствующего прикладного программного обеспечения.
Архитектуру параллельных мультимикропроцессорных вычислительных систем вообще можно классифицировать, например, по типу внутрисистемных связей, связанности микропроцессоров, по тому, состоит ли система из однородных или неоднородных вычислительных средств, и тому подобное. Глобально mМП системы можно разбить на две группы: а)пирамидальные и б)распределенные.
Рисунок 3.4. Примеры связей между модулями мультимикропроцессорной ИУВС распределенного типа
Пирамидальные mМП системы содержат по отношению к общей магистрали один активный микропроцессор и несколько пассивных