

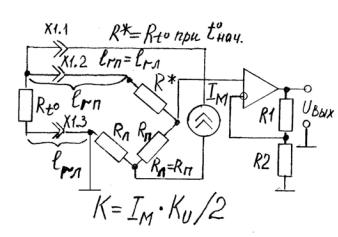
Условия начальной балансировки моста приведены на рисунке 6.5. Напряжение рассогласования, вызванное приращением ∆Rt°
терморезистора Rt° , подается на масштабирующий усилитель с коэффициентом усиления KU. Поскольку ток моста IM при сбалансированном
мосту делится поровну между левой и правой ветвями моста, то коэффициент передачи ОЧ, будет определяться выражением:
K=UВЫХ /∆Rt° = (IM/2) KU.
6.1.7 Нелинейные преобразователи
Класс нелинейных преобразователей существует для реализации самых различных функций: «выпрямления», то есть получение абсолютного (положительного или отрицательного) значения функции; перемножения сигналов; логарифмирования и антилогарифмирования сигналов; и тому подобное.
В пределах изучаемой тематики интерес для изучения представляет нелинейный преобразователь–выпрямитель (НПВ), необходимый для согласования источника измерительного переменного напряжения и АЦП. Упрощенная схема НПВ представлена на рисунке 6.6а.
Рисунок 6.6 – Схемы выпрямителей переменного напряжения
Коэффициент передачи каскада – инвертирующего усилителя с нелинейной обратной отрицательной связью через нелинейное сопротивление RНОС. Коэффициент передачи такого каскада определяется
выражением
K= - RНОС / RВХ.
Если пренебречь падением напряжения на открытом диоде (то есть считать его внутреннее сопротивление RД =0) и токами утечки при зарытом
диоде (RД=∞), то
- для положительного напряжения на входе коэффициент передачи
K+= - RНОС/ RВХ=-0/ RВХ=0;
- для отрицательного напряжения на входе коэффициент передачи
K-= - RНОС/ RВХ= - RОС /RВХ.
Получили однополупериодный выпрямитель.
На практике идеальных диодов не бывает, да и эффективность однополупериодного выпрямителя не высока, поэтому высокоточные НПВ – это обычно двухполупериодные НПВ с компенсирующим диодом. На рисунке 6.6б представлена упрощенная схема такого НПВ.
Первый каскад – собственно сам НПВ. Но напряжение с него снимается через компенсирующий диод V2, параметры режима которого идентичны параметрам режима V1 (происходит вычитание ошибки, внесенной V1).
Второй каскад является сумматором-инвертором, который суммирует входной сигнал и его инверсный полупериод с НПВ в пропорции 1:2, в результате чего выходное напряжение UВЫХ при «выпрямлении»
гармонического сигнала UВХ = Umcosωt будет представлять собой
последовательность полупериодов с удвоенной частотой 2ω |
одной |
полярности: |
|
UВЫХ(t) =-|Umcosωt |. |
|
6.1.8 Фильтры для нелинейных преобразователей
Фильтры, используемые в ИУВС РЭА, разделяют по назначению (хотя функционально они могут и не различаться). Фильтры, используемые в СОД, служат решению проблем помехоустойчивости с требуемой точностью аппроксимации амплитудно-фазового (чаще всего только амплитудного) спектра. Фильтры, входящие в состав преобразователей, наоборот, решают задачи преобразования спектра.
Простейший фильтр для решения аналогичной задачи – фильтр нижних частот (ФНЧ) представлен на рисунке 6.7а. Его функция – выделение постоянной составляющей «выпрямленного» сигнала, которая пропорциональна Um (как обратная задача – подавление всех гармоник).
Рисунок 6.7 – ФНЧ для НПВ
Рассмотрим характеристики ФНЧ, исходя из его функции в составе высокоточного НПВ (рисунок 6.7б).
Спектр сигнала UВЫХ(t) =-|Umcosωt | будет иметь вид:
2
cn=2Umcos(nπ)/[π(1-4n )],