

микроконтроллеров) является очень важным классификационным признаком. Система, содержащая такие средства, обладает определенной универсальностью, так как при соответствующем программном обеспечении может (при ограниченном быстродействии) выполнять функции систем различного назначения.
В ИУВС можно выделить универсальное ядро, в которое входят часть аналоговых преобразователей (например, масштабные преобразователи, аналоговые коммутаторы), аналого-цифровые преобразователи, часть цифровых преобразователей (цифровые коммутаторы и устройства памяти), ЭВМ, набор устройств отображения и регистрации информации, средства интерфейса и устройства, формирующие воздействия на исследуемый объект. Это ядро ИУВС часто называют измерительно-вычислительным комплексом (ИВК).
Измерительно-вычислительные комплексы при известных условиях могут создаваться на базе специализированных цифровых вычислительных машин (СЦВМ), входящих в состав технологических комплексов специального назначения.
Наличие контура обратной информационной связи позволяет организовать компенсационные методы измерения, позволяющие получить более высокие точностные характеристики.
Изменение скоростей получения и выдачи информации в ИУВС возможно главным образом при использовании запоминающих устройств (ЗУ). Оно может быть, например, применено для быстрого запоминания значений исследуемых величин и медленной выдачи информации и наоборот.
Введение адаптации ИУВС к исследуемым величинам, структурной и информационной избыточности в целях повышения надежности, помехоустойчивости, точности, гибкости работы и тому подобное типично для системотехники. Можно предполагать, что дальнейшее развитие ИУВС во многом будет зависеть от решения этих вопросов.
Приведенная бинарная классификация по десяти признакам позволяет
10
различать 2 =1024 разновидностей ИУВС по принципам построения.
2.2. Типовая схема и характеристика решаемых задач ИУВС
По существу современные ИУВС в первую очередь предназначены для контроля состояния объекта на основе измерительной информации, представленной совокупностью значений и состояний технологических параметров. Отличительные признаки современных ИУВС:
1)ограниченный набор четко сформулированных задач;
2)оптимизация структуры ИУВС для конкретного применения;
3)работа в реальном масштабе времени, то есть обеспечение минимального времени реакции на изменение внешних условий;
4)высокие требования по надежности с учетом большой продолжительности непрерывной работы;
5)сложные условия эксплуатации;
6)обеспечение автоматического режима работы или режима с участием оператора как элемента системы.
Именно эти качества характеризуют процесс синтеза современных ИУВС, определяют их структуру и набор функциональных задач.
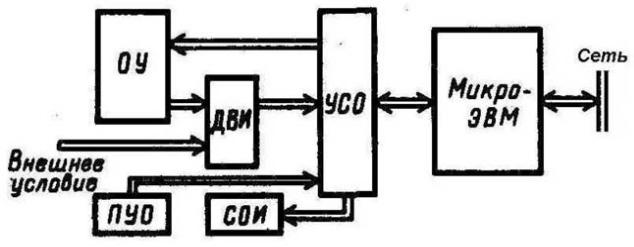
Вобщем виде структура типового узла (модуля) ИУВС представлена на рисунке 2.1. Здесь:
Рисунок 2.1 – Макроструктурная схема ИУВС
ОУ — объект управления; содержит датчики входной информации ДВИ; УСО - устройство сопряжения с объектом и микроЭВМ; ПУО - пульт управления оператора; СОИ - система отображения информации;
СТРУКТУРНЫЕ связи (стрелки) - устройства передачи информации между элементами системы и сетью (управляющей вычислительной сетью – ЛВС).
Ядром ИУВС, реализующим процесс переработки информации и формирования воздействий на объект управления ОУ, является микроЭВМ, реализованная в современных системах ИУВС, в зависимости от сложности задач, на однокристальной ЭВМ (ОЭВМ) или микропроцессоре (МП).
Применение микроЭВМ способствует:
-повышению надежности;
-снижению стоимости системы;
-сокращению сроков разработки аппаратных средств и программного обеспечения;
-быстрой адаптации к изменениям требований заказчика в процессе разработки системы и в период ее модернизации;
- более простому осуществлению функций распределенного,
децентрализованного управления; - обеспечению модульного принципа построения системы.
Самой сложной связкой является связка ДВИ УСО, которая по существу есть система предварительной обработки данных – СОД. В общем случае, исходя из требования ввода информации в микроЭВМ (например, на базе МП), она должна содержать: группу датчиков первичной информации, размещенных в непосредственной близости от объекта управления, контроля или измерения, блок преобразователей аналоговых сигналов датчика в цифровые коды (АЦП), цифровые и аналоговые коммутаторы, аналоговые вычислительные устройства, цифровые и аналоговые каналы связи, блок преобразователей цифровых сигналов в аналоговые (ЦАП), цифровые регистрирующие устройства.
Различные требования по стоимостным и техническим характеристикам, предъявляемые к СОД, определяют возможность вариаций структуры СОД на основе выбора метода обработки сигналов.
На рисунке 2.2-а показана структура, реализующая принцип параллельной обработки аналоговых сигналов, поступающих от датчиков СОД. Данная структура позволяет обеспечить максимальную производительность аппаратуры всех каналов систем СОД (из-за независимости обработки каждого сигнала) и высокое качество преобразования сигналов вследствие возможности системы по обеспечению требуемого уровня нормализации сигнала на входе АЦП в каждом канале.
Предельное количество каналов системы СОД в данном случае ограничено допустимым значением динамической погрешности преобразования i-го параметра, то есть:
Nц< ∆xi доп / [(dxi /dt)max tк] (2.1)
где Nц — предельно допустимое количество цифровых каналов
преобразования системы СОД;
∆xi доп — допустимое значение динамической погрешности i-го параметра; (dxi/dt)max — максимальное значение производной i-го параметра в диапазоне
преобразования;
tк — период коммутации.
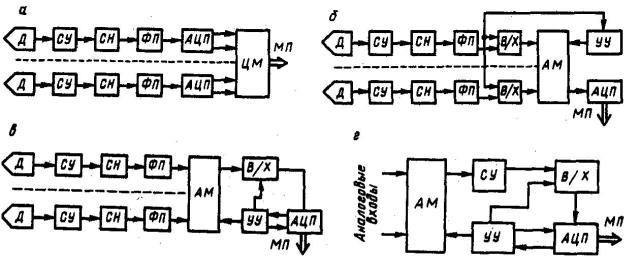
Д— датчик; СУ — согласующее устройство; СН — схема нормализации; ФП
—функциональный преобразователь; АЦП — аналого-цифровой преобразователь; ЦМ — цифровой мультиплексор; В/Х — схема выборки — хранения; AM — аналоговый мультиплексор; УУ — устройства управления.
Рисунок 2.2 Структура системы СОД с параллельными цифровыми (а) и аналоговыми (б) выходами; с последовательными аналоговыми (в) и с последовательными и параллельными аналоговыми (г) выходами
Независимость отдельных ветвей дает возможность просто (в структурном смысле) реализовать необходимые функциональные преобразования аналоговых сигналов. Большое преимущество такой системы заключается в устранении ошибок, возникающих при коммутации и выборке — хранении аналоговых сигналов, вносящих основной вклад в суммарную погрешность преобразования. Очень важно то, что эта структура позволяет значительно повысить помехозащищенность системы на основе использования цифровых каналов передачи данных на вход ЭВМ, если обеспечить преобразования сигналов непосредственно на выходе датчиков.
Другие варианты построения структуры системы СОД основаны на принципе последовательной обработки аналоговых сигналов и перенесении мультиплексирования из цифровой в аналоговую область, а также применения аналоговых схем выборки — хранения для фиксации аналоговых сигналов на входе АЦП. Это дает возможность использовать только один АЦП независимо от числа аналоговых входов, предельное количество которых можно определить из выражения
Nа< ∆xiдоп / [(dxi /dt)max (tк+ tп)] |
(2.2) |
где
Nа — предельно допустимое количество аналоговых каналов преобразования СОД;