

2.3.1В чем преимущество микро-ЭВМ с открытой архитектурой?
2.3.2По каким общим признакам классифицируются ИУВС?
2.3.3Дайте характеристику функциям ввода и предварительной обработки входной информации в ИУВС.
2.3.4Дайте характеристику задачам обработки входной информации в микроЭВМ.
2.3.5Назовите состав основных функциональных задач в микроЭВМ.
2.3.6В чем заключается диагностирование ИУВС?
2.3.7Дайте характеристику функциям управляющих воздействий.
2.3.8Дайте характеристику функциям обмена информацией через ЛВС.
2.3.9Дайте характеристику функциональным задачам II типа.
2.3.10Какие параметры должны указываться при проектировании ИУВС в случае аналогового представления информации?
2.3.11Какие параметры должны указываться при проектировании ИУВС в случае дискретного представления информации?
2.3.12Как учитываются параметры оператора как элемента УСО?
3.СТРУКТУРЫ МИКРОПРОЦЕССОРНЫХ ИУВС
3.1. Характеристика микропроцессорных ИУВС
Дальнейшее развитие микропроцессорной техники, в особенности появление однокристальных ЭВМ (ОЭВМ) и микроконтроллеров с достаточно высокой производительностью и большим объемом оперативной памяти, позволило перейти к созданию почти полностью автономных систем сбора и обработки измерительной информации на базе микроЭВМ, выполненной в виде компактной конструкции. При этом сама система стала значительно проще и производительнее, надежнее и дешевле, так как существенно уменьшились материальные и временные затраты, связанные с программными и аппаратурными средствами связи с центральным обрабатывающим пунктом (центром управления).
3.1.1. Характеристика микропроцессорных средств ИУВС
Различными фирмами, как зарубежными, так и отечественными выпускаются различные модули, с помощью которых можно собрать автоматизированные системы контроля и управления самого различного назначения.
Рассмотрим историю развития микропроцессорных ИУВС, которая, несмотря на короткий отрезок времени, весьма насыщена.
В 80-х годах промышленность выпускала микроЭВМ, которые с успехом
работали в автоматизированных системах контроля: «Электроника С-5», «Электроника-60», «Электроника МС 1201.01». Две последние модели микроЭВМ были программно совместимы с рядом микро- и мини-ЭВМ, получивших широкое распространение в то время как в СССР, так и за рубежом. К семейству мини-ЭВМ данного типа относятся «Электроника 10025», «Электроника-79», а зарубежных — мини-ЭВМ ряда PDP-11 и микроЭВМ LSI-11 (США). Характерной особенностью указанных ЭВМ является наличие общей магистрали, служащей для связи всех устройств, входящих в систему. Такая архитектура называется открытой. Подобно тому, как для 60-х годов стала образцовой архитектура ЭВМ IBM/360, для 70-х и 80-х годов для мини- и микроЭВМ стала образцовой архитектура PDP-11. Популярности ЭВМ PDP-11 способствовал также широкий диапазон разработанного и развивающегося математического обеспечения.
Внастоящее время тенденция создания микроЭВМ с общей магистралью полностью закрепилась, вытеснив все другие идеологии архитектурных построений микроЭВМ. Изменилась лишь элементная база: на смену микропроцессорам в ИУВС приходят более интегрированные МП и однокристальные ЭВМ (ОЭВМ).
Принцип объединения компонентов ЭВМ и периферийных устройств с помощью общей магистрали позволяет легко модифицировать систему в соответствии с конкретными потребностями. Форма связи каждого устройства, подключенного к общей магистрали, — стандартная.
Взависимости от конкретных условий применения приходится учитывать
итакие факторы, как быстродействие, объем оперативной памяти, мощность потребления, габаритные размеры, надежность и тому подобное. Наиболее полно вышеприведенным критериям отвечала одноплатная микроЭВМ «Электроника МС 1201.03» и к 90-м годам являющаяся наиболее совершенной среди аналогичного класса моделей. Основа ее — микропроцессорный комплект серии 1801, выполненный по n-канальной МОП-технологии. МикроЭВМ «Электроника МС 1201.03» предназначена для использования в АСУ ТП, контрольно-измерительной аппаратуре, в системах обработки цифровой информации общего назначения. Широкая об-ласть применения обеспечивается встраиванием ее в аппаратуру потребителя.
МикроЭВМ представляет собой систему функциональных устройств (рисунок 3.1), связь между которыми осуществляется через общую магистраль (единый системный канал обмена информацией). Минимальная конфигурация микроЭВМ содержит:
ЦП — процессор (АЛУ, цифровой автомат, генератор тактовых импульсов; ОЗУ — оперативное запоминающее устройство (для хранения исходных
данных и результатов вычислений); ПЗУ — постоянное запоминающее устройство (для хранения операционной
системы, программ отладчиков и тому подобное);
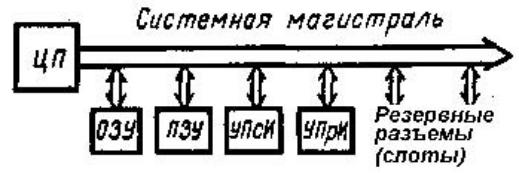
УПсИ — устройство последовательного интерфейса ввода-вывода информации; УПрИ — устройство параллельного (байтового) параллельного интерфейса вывода;
Рисунок 3.1 – Структура микроЭВМ для ИУВС Общая магистраль – это расширение (удлинение) системной магистрали
микропроцессорной системы, представляющую собой сформированную ЭВМ. МикроЭВМ на базе МП или ОЭВМ обеспечивает значительную гибкость, модульную простоту и упрощает разработку ИУВС.
Выбор типа МП или ОЭВМ производится исходя из возможности использования стандартного программного обеспечения существующих архитектур микро- и мини-ЭВМ, наличия развитого периферийного оборудования и возможности наращивания технических средств (как внешних устройств по отношению к микроЭВМ).
3.1.2. Характеристика программного обеспечения
Эффективность ИУВС в значительной мере определяется качеством ее программного обеспечения. Чтобы ИУВС выполняла заданные ей функции, в памяти ЭВМ должна находиться последовательность команд, реализующая эти функции, то есть программа. Программа определяет порядок, в котором машина извлекает из памяти или из регистров внешних устройств ту или иную часть информации, коды операций (сложение, вычитание, пересылки и тому подобное), которые должны выполняться, адреса хранения результатов, адреса, откуда должны выбираться следующие команды при выполнении некоторых условий в исходных данных или в результатах вычислений.
Единственный язык, который «понимает» процессор ЭВМ, это машинный язык в двоичных кодах. Хотя разработчик ИУВС и может использовать этот машинный язык, но затраты труда на разработку даже сравнительно небольшой программы при этом были бы огромны. Поэтому созданы специальные языки – заменители машинных языков – ассемблеры, где каждая машинная команда заменяется соответствующей ей фразой на человеческом языке. Для перевода программы, написанной на ассемблере, в машинные (двоичные) коды существуют специальные программы – компиляторы. Эти программы входят,