

5.3.1. Өндірістік механизмдер мен электрқозғалтқыштарының сипаттамалары
Электржетегінің дұрыс жобалануы және үнемді қолданылуы үшін қозғалтқыштың механикалық сипаттамаларының өндірістік механизмдер сипаттамаларымен сәйкестігін білу керек. Өндірістік механизмнің механикалық сипаттамасы деп қозғалтқыш білігіне келтірілген жылдамдық пен механизмнің кедергі иінкүші ω=f(М) арасындағы тәуелділікті атайды. Әртүрлі өндірістік механизмдердің әртүрлі механикалық сипаттамалары болады. Оларды жалпы түрде келесі формуламен жазуға болады
![]() ,
(5.1)
,
(5.1)
мұнда Мс – ω жылдамдығы кезіндегі механизмнің кедергі иінкүші;
Мо – механизмнің қозғалмалы бөлігіндегі үйкеліс кедергісінің иінкүші;
Mс.н – ωн жылдамдығы кезіндегі кедергі иінкүші.
Келтірілген формулаларға сәйкес өндірістік механизмдердің механикалық сипаттамаларын келесі негізгі категорияларға жатқызуға болады.
Жылдамдықтан тәуелсіз механикалық сипаттама (Х=0 кезіндегі 3.1- суретіндегі 2 қисығы). Бұл сипаттамалар көтеру крандары, металл кесуші станоктардың беру механизмдері, поршенді сорғылар, конвейерлерде болады.
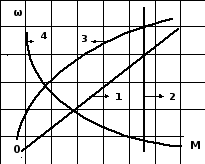
5.8 - Сурет. Өндірістік механизмдердің механикалық сипаттамалары
Сызықты өсетін механикалық сипаттама (Х=1 кезіндегі 1 қисығы). Мұндай сипаттама тәуелсіз қоздырылатын тұрақты ток генераторында болады.
Сызықты емес - өсетін (парабола) механикалық сипаттама (3 қисығы Х=2 кезінде). Мұндай сипаттамасы бар механизмдер желдеткіштік жүктемесі бар механизмдер деп аталады – ортадан тепкіш сорғылар, есу қалақтары және т. б.
Сызықты емес – құлдилайтын механикалық сипаттама (Х=1 кезіндегі 4 қисығы). Бұл сипаттамаға бірқатар токарлық, жонушы станоктар ие болады.
Электрқозғалтқышының механикалық сипаттамасы деп оның бұрыштық сипаттамасының айналдырушы иінкүшіне тәуелділігін ω=f(M) атайды.
Электржетегінің механикалық сипаттамасының қатаңдығы деп электр қозғалтқышының электрмагниттік иінкүштерінің айырмасының электр жетегінің бұрыштық жылдамдықтары айырмасына қатынасын атайды.
![]() .
(5.2)
.
(5.2)
Механикалық сипаттамалардың түрлері:
а) иінкүш өзгерген кезде жылдамдық өзгеріссіз қалатын абсолютті қатаң механикалық сипаттама, бұл сипаттама синхронды қозғалтқыштарда болады (3.2 - суреті, 1 қисығы);
б) иінкүш өзгерген кезде жылдамдықтың өзгеруі өте аз болатын қатаң механикалық сипаттама, бұл сипаттама тәуелсіз қоздырылатын тұрақты ток қозғалтқыштарында болады (2 қисығы);
в) иінкүш өзгерген кезде жылдамдық біршама өзгеретін жұмсақ механикалық сипаттама (3 қисығы);
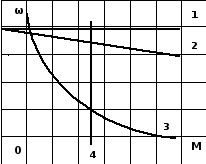
5.9 - Сурет. Электр қозғалтқышының механикалық сипаттамалары
г) жылдамдық өзгерген кезде иінкүш өзгеріссіз қалатын абсолютті жұмсақ сипаттама, бұл сипаттама «қозғалтқыш – ток көзі» жүйесінде орын алады (4 қисығы).
5.4. Электр жетегі қозғалысының теңдеуі
Электр жетегінің тұрақтанған режім жұмысында қозғалтқыштың айналдырушы иінкүші механизмнің кедергі иінкүшіне тең және жетектің жылдамдығы тұрақты болады. Электр жетегінің бір тұрақтанған жұмыс күйінен екінші күйіне өткен кезде анықталған заңдар бойынша инерция күшінің пайда болуына байланысты жүйедегі жылдамдық, иінкүш және ток өзгереді, бұл процесс өтпелі процесс деп аталады. Олардың пайда болу себептері – қозғалтқыш білігіндегі жүктеменің немесе электр жетегінің басқарушы әрекетінің өзгеруі, яғни іске қосу, тежеу, айналу бағытын өзгерту және т. б. режімдері орын алады. Бұл жағдайда түзу қозғалыс күштерінің теңесу теңдеуін мына түрде жазуға болады
![]() ,
(5.3)
,
(5.3)
мұнда F – механизмнің кедергі күшімен Fс теңесетін қозғаушы күш;
![]() –жылдамдық
өзгерген кездегі инерция күші;
–жылдамдық
өзгерген кездегі инерция күші;
m – дене массасы.
Механизмге әсер етуші күштің өлшем бірлігі кг м∙с-2.
Айналмалы қозғалыс үшін иінкүштер теңесуінің теңдеуі немесе электр жетегінің қозғалыс теңдеуі мына түрде жазылады
![]() .
(5.4)
.
(5.4)
Электр
қозғалтқышының айналдырушы иінкүші
оның білігіндегі кедергі иінкүші Мс
мен динамикалық иінкүшімен
![]() теңеседі, мұнда жетектің инерция иінкүші
көптеген өндірістік механизмдер үшін
теңеседі, мұнда жетектің инерция иінкүші
көптеген өндірістік механизмдер үшін![]() тұрақты:
тұрақты:
M
Мс кезінде;
![]()
0 - жетек үдеу режімінде;
0 - жетек үдеу режімінде;
М
Мс кезінде;
![]() <
0 - жетек баяулау режімінде;
<
0 - жетек баяулау режімінде;
![]() =
0 кезінде жетек тұрақтанған жұмыс
режімінде болады.
=
0 кезінде жетек тұрақтанған жұмыс
режімінде болады.
Динамикалық иінкүш электр жетегінің тек ғана өтпелі режимінде, жылдамдық өзгергенде пайда болады. Бұл иінкүш қозғалысқа қарсы бағытталған, тежеу кезінде ол қозғалысты ұстап тұрады. Осыны есепке алып, жетектің қозғалыс теңдеуінің жалпы жағдайдағы түрін аламыз
![]() .
(5.5)
.
(5.5)