

МИНИСТЕРСТВО СВЯЗИ И ИНФОРМАТИЗАЦИИ РЕСПУБЛИКИ БЕЛАРУСЬ
Учреждение образования
«ВЫСШИЙ ГОСУДАРСТВЕННЫЙ КОЛЛЕДЖ СВЯЗИ»
ФАКУЛЬТЕТ ЭКОНОМИКИ И ПОЧТЫ
КАФЕДРА ОРГАНИЗАЦИИ И ТЕХНОЛОГИИ ПОЧТОВОЙ СВЯЗИ
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЛЕНТОЧНОГО ТРАНСПОРТЕРА С ЧЕРВЯЧНО-ЦИЛИНДРИЧЕСКИМ РЕДУКТОРОМ
Пояснительная записка
к курсовому проекту
по дисциплине
«ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ
ПОЧТООБРАБАТЫВАЮЩЕГО ОБОРУДОВАНИЯ»
Выполнила студентка гр.ПС941 Ю.С. Прохорова
Руководитель преподаватель В.М. Сурин
Минск 2011
СОДЕРЖАНИЕ
Введение………………………………………………………………………………...5
1 Описание работы привода ленточного конвейера…………………….…………...7
2 Расчет и выбор электродвигателя по мощности кинематический расчет
редуктора………………………………………………………………………………..9
3 Геометрический расчет редуктора…………………………………………………15
3.1. Крутящие моменты на валах редуктора………………………………………15
3.2 Определение параметров цилиндрических зубчатых передач………………16
3.3 Определение параметров червячных передач………………………………...19
3.4 Предварительное определение диаметров валов……………………………..22
4 Расчет времени разгона и останова………………………………………………...24
4.1. Выбор подшипников…………………………………………………………..24
4.2 Компоновочная схема редуктора……………………………………………...24
4.3 Определение моментов инерции валов……………………………………….26
5 Описание схем пуска и реверса электродвигателя………………………………..33
Заключение…………………………………………………………………………….34
Литература……………………………………………………………………………..35
Приложение А…………………………………………………………………………36
Приложение Б…………………………………………………………………………37
Приложение В…………………………………………………………………………38
Приложение Г…………………………………………………………………………39
Приложение Д…………………………………………………………………………40
Приложение Е…………………………………………………………………………41
ВВЕДЕНИЕ
Целью данного курсового проекта является расчет электромеханического привода ленточного транспортера с червячно-цилиндрическим редуктором.
Привод – это устройство, посредством которого осуществляется движение рабочих органов механизма. Структурная схема привода включает двигатель того или иного типа и передачу. Последняя служит для передачи энергии двигателя к рабочим органам и может быть механической, электрической, гидравлической, пневматической и комбинированной.
В приборных устройствах широко применяются в качестве двигателей электродвигатели различных типов, механические редукторы и мультипликаторы для передачи движения к исполнительным органам механизма. Приводы такого типа называются электромеханическими (ЭМП).
Электромеханические приводы классифицируются по ряду признаков. Основными из них являются: число двигателей и схема соединения их с передачами, характер работы ЭМП. Особую группу составляют ЭМП, выполненные в виде электродвигателей, объединенных в одном компоновочном блоке с редуктором, так называемые моторредукторы.
По числу двигателей различаются электромеханические приводы: групповой, однодвигательный и многодвигательный.
Групповым называют привод, при котором от одного двигателя посредством механических передач приводится в движение несколько отдельных механизмов.
Групповой привод имеет низкий коэффициент полезного действия (КПД), громоздок и сложен по конструкции.
Однодвигательный электромеханический привод наиболее распространен. Если же отдельные рабочие органы одного и того механизма приводятся в движение отдельными двигателями, то такой привод будет многодвигательным.
В зависимости от характера работы электромеханические приводы делятся на нерегулируемые и регулируемые. Для нерегулируемых ЭМП кинематические и динамические характеристики движения рабочих органов механизмов остаются постоянным на протяжении всего цикла работы привода.
Характеристикой таких ЭМП является продолжительность работы, в зависимости от которой различают три номинальных режима: продолжительный, кратковременный и повторно-кратковременный. Режим работы считается продолжительным, если время одного цикла работы превышает 10 мин. Повторно-кратковременный режим характерен для работы электромеханического привода почтово-кассовых аппаратов, устройств ввода-вывода информации вычислительных систем и др.
Нерегулируемый ЭМП предназначен для преодоления как постоянно действующих статических нагрузок, так и для повторяющихся кратковременных статических и динамических нагрузок.
Регулируемые электромеханические приводы характеризуются возможностью управления параметрами движения рабочих органов механизма в течение одного цикла включения привода. Это управление может достигаться путем изменения напряжения питания электродвигателя. Регулируемые ЭМП работают в повторно-кратковременных режимах и в отличие от нерегулируемого привода, где нагрузка носит статический характер, для регулируемого привода характерны динамические нагрузки, поэтому одним из основных требований к регулируемым электромеханическим приводам является малая инерционность.
При проектировании ЭМП необходимо решить следующие задачи:
- правильно выбрать двигатель, рассчитав его необходимую мощность;
- найти общее передаточное отношение редуктора и разбить его по ступеням;
- рассчитать параметры кинематической схемы редуктора;
- рассчитать время разгона и останова ЭМП.
1 ОПИСАНИЕ РАБОТЫ ПРИВОДА ЛЕНТОЧНОГО ТРАНСПОРТЕРА
Объектом курсового проекта является червячно-цилиндрическая передача (редуктор) электромеханического привода, предназначенная для преобразования вращательного движения. При проектировании редуктора необходимо выполнить различные расчеты, позволяющие выбрать оптимальные варианты конструкции либо проверить правильность принятых конструктивных решений.
Назначение редуктора – повышение вращающегося момента ведомого вала по сравнению с ведущим. Применяется в приводах машин, работающих с кратковременным или средним режимом по времени.
Наибольшее распространение в технологическом оборудовании предприятий получил однодвигательный электромеханический привод, который состоит из двух основных частей: электродвигателя, преобразующего электрическую энергию в механическую, и редуктора, понижающего скорость рабочего органа электродвигателя до требуемой скорости рабочей машины. Для соединения вала двигателя с валом редуктора применяется такое устройство, как муфта, которое передает движение без изменения скорости вращения. Кроме основных частей, в ЭМП входят различные виды подшипников, корпус, на котором крепятся сборочные единицы машины и прочее.
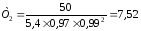
Электромеханический привод состоит из электродвигателя и червячно-цилиндрического редуктора. Кинематическая схема рассматриваемого ЭМП изображена на рисунке 1.
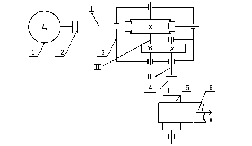
1 – электродвигатель;
2 – муфта;
3 – редуктор (I, II, III – валы);
4 – муфта;
5 – барабан приводной;
6 – лента транспортера.
Рисунок 1 – Кинематическая схема привода с червячно-цилиндрическим редуктором
Движение происходит следующим образом: от электродвигателя 1 крутящий момент через вал I посредством муфты 2 передается на червяк. В зацепление с червяком входит червячное колесо, закрепленное на промежуточном валу II. Через цилиндрическую прямозубую передачу, состоящую из шестерни и зубчатого колеса, крутящий момент передается на выходной вал III. Оттуда он передается на приводной барабан 5, который приводит в движение ленту транспортера 6.
2 РАСЧЕТ И ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ПО МОЩНОСТИ И
КИНЕМАТИЧЕСКИЙ РАСЧЕТ РЕДУКТОРА
Электродвигатели по назначению делят на общего назначения и исполнительные. Электродвигатели общего назначения (силовые) предназначены для работы в нерегулируемом ЭМП. В эту группу входят двигатели различного типа: переменного тока асинхронные и синхронные, постоянного тока. Наибольшее применение получили асинхронные двигатели благодаря ряду достоинств:
- простота конструкции и обслуживания;
- надежность;
- низкая стоимость.
Их недостатки – невысокий cosφ, особенно при холостом ходе и малых нагрузках, невозможность простого и экономичного регулирования скорости вращения, относительно малый пусковой момент и большой пусковой ток.
Синхронная скорость вращения электродвигателя – число оборотов в минуту вращающегося магнитного поля в статоре двигателя, независимое от нагрузки на валу и скорости вращения ротора, определяемое только частотой переменного тока и числом полюсов двигателя. Передача энергии с неподвижного статора на вращающийся ротор возможна только при отставании (скольжении) скорости ротора от скорости магнитного поля.
Исполнительные электродвигатели предназначены для работы в следящем приводе. Они преобразуют подводимый к ним сигнал (напряжение управления) в угловое перемещение или в величину скорости выходного вала.
Выбор электродвигателя заключается в подборе наиболее рационального типа (серии) и конкретного двигателя в намеченной серии в зависимости от требуемой мощности.
Исходными данными для выбора двигателя является его расчетная мощность Рд. Если ЭМП работает при постоянной нагрузке Мн, мощность двигателя определяют по формуле
 (1)
(1)
где Мн – момент нагрузки на выходном валу редуктора в Н·м;
ωвых – угловая скорость выходного вала редуктора, рад/с;
k – коэффициент запаса, учитывающий необходимость преодоления
динамических нагрузок в момент разгона, (k= 1,05…1,1);
ηо –суммарный КПД редуктора и муфты.
Скорость выходного вала редуктора неизвестна, но ее можно найти через заданную скорость V движения ленты транспортера, так как вал приводного барабана транспортера имеет ту же угловую скорость, что и выходной вал редуктора:
 (2)
(2)
где nвых – частота вращения вала барабана, об/мин;
V – скорость движения транспортерной ленты;
d – диаметр приводного барабана, м.
Рассчитаем скорость на выходном валу (валу III) редуктора:
 (об/мин.)
(об/мин.)
Угловая скорость движения определяется по формуле
 (3)
(3)
где ωвых – угловая скорость движения, рад/с.
 (рад/с)
(рад/с)
Коэффициент полезного действия механической передачи может иметь значение от 0,1 до 0,97 причем с увеличением передаточного числа и уменьшением передаваемой мощности КПД передачи уменьшается. Задаваясь значением КПД, необходимо учитывать и температурные условия работы электромеханического привода, так как вязкость используемых смазок зависит от температуры и существенно влияет на величину потерь на трение в кинематических парах.
Рассчитаем суммарный коэффициент полезного действия ЭМП по формуле:
 ,
(4)
,
(4)
где
 –
коэффициент полезного действия
муфты(0,97);
–
коэффициент полезного действия
муфты(0,97);
 –
коэффициент полезного действия редуктора
(0,99);
–
коэффициент полезного действия редуктора
(0,99);
 –
коэффициент полезного действия пары
подшипников качения (два
–
коэффициент полезного действия пары
подшипников качения (два
вала в редукторе I, II, III – три пары подшипников ηп3);
 - коэффициент полезного действия
червячной передачи редуктора(0,7);
- коэффициент полезного действия
червячной передачи редуктора(0,7);
 -коэффициент полезного действия
цилиндрической зубчатой
-коэффициент полезного действия
цилиндрической зубчатой
передачи редуктора(0,97).

 Соответственно
КПД редуктора равен
Соответственно
КПД редуктора равен

Общий КПД привода равен

На основании полученных данных рассчитаем мощность электродвигателя по формуле 1
 (Вт.)
(Вт.)
Из таблицы приложения А выбираем асинхронный двигатель с синхронной скоростью вращения 3000 об/мин по ближайшей большей мощности. Это двигатель АИР56В2/2700, имеющий номинальную мощность Р=0,25 кВт; номинальную скорость вращения nном=2700 об/мин.
 (рад\с)
(рад\с)
Таблица 1 – Характеристики выбранного типа электродвигателя
|
Мощность, кВт |
Синхронная скорость вращения электродвигателя, мин-1 |
Мп/Мн |
|
Р |
3000 |
|
|
0,25 |
АИР56В2/2700 |
1,9…2,1 |
В таблице 1 применены следующие обозначения:
АИ– обозначение серии;
Р – вариант привязки мощности к установочным размерам по ГОСТ;
56 – высота от центра оси вращения до нижней поверхности лап, мм. Основной конструкционный параметр электродвигателя (габарит);
В – длина сердечника статора при сохранении установочных размеров;
2 – число полюсов, определяющих синхронную частоту вращения электродвигателя. При частоте сети 50 Гц и наличии 2 полюсов — 3000 об/мин;
Мп – пусковой момент двигателя;
Мн – номинальный момент двигателя.
Кинематический расчет – разбивка общего передаточного отношения по ступеням. Учитывая, что тип передачи выбран, выбор кинематической схемы механизма состоит в определении числа ступеней.
При определении числа ступеней и распределении общего передаточного отношения по ступеням необходимо учитывать требования, предъявляемые к механизму и условия работы.
Передаточное отношение привода равно отношению скорости двигателя nном к скорости вращения барабана транспортера, т.е. nвых. Для понижения скорости двигателя до требуемой скорости приводного барабана ленточного транспортера устанавливаем зубчатый редуктор с передаточным отношением, равным:
 ,
(5)
,
(5)
где nдв – частота вращения вала электродвигателя, nдв = 2700 об/мин;
nвых – скорость вращения выходного вала, nвых= 25 об/мин.
Подставим значения в формулу (5)

Передаточное отношение, которое можно воспроизвести одной парой зубчатых колес, равно
(6)
где n1, ω1 (n2, ω2) - скорости вращения первого (второго) зубчатого колеса соответственно в об/мин или рад/с;
z1, (z2) – число зубьев первого (второго) зубчатого колеса.
Рекомендуемые значения передаточного отношения для червячно-цилиндрической зубчатой передачи i = 16…300, с передаточным отношением зубчатой пары не более 4, 5.
Общее передаточное отношение привода разбивают по отдельным ступеням (оно равно произведению передаточных отношений отдельных ступеней).
(7)
где
 -
передаточное отношение первой (второй)
ступени.
-
передаточное отношение первой (второй)
ступени.
Для червячно-цилендрической зубчатой передачи:
 (8)
(8)
где
 передаточное
отношение червячной зубчатой передачи;
передаточное
отношение червячной зубчатой передачи;
 передаточное
отношение цилиндрической зубчатой
передачи.
передаточное
отношение цилиндрической зубчатой
передачи.
Для
расчетов примем передаточное отношение
червячной передачи:
 ;
число заходов червяка
;
число заходов червяка ,
,
 ;
коэффициент диаметра червяка q=8.
;
коэффициент диаметра червяка q=8.
Число зубьев червячного колеса определим по формуле:
(9)

Передаточное отношение червячной передачи определяем по формуле
 (10)
(10)

Число зубьев колеса 4 цилиндрической зубчатой передачи редуктора определим по формуле

 (11)
(11)

Найдем относительную и абсолютную погрешности:

где
 – передаточное отношение, рассчитанное
по формуле (5);
– передаточное отношение, рассчитанное
по формуле (5);
 – передаточное отношение редуктора,
полученное с учетом выбранного числа
зубьев колес по формуле (7).
– передаточное отношение редуктора,
полученное с учетом выбранного числа
зубьев колес по формуле (7).
Если
 > 2,5 %, то погрешность следует уменьшить
путем изменения чисел зубьев и
корректировки передаточного отношения
ступеней.
> 2,5 %, то погрешность следует уменьшить
путем изменения чисел зубьев и
корректировки передаточного отношения
ступеней.
Для
рассматриваемого примера
 = 108, а действительное передаточное
отношение редуктора
= 108, а действительное передаточное
отношение редуктора
 .
.
Погрешность
передаточного отношения при выбранном
числе зубьев элементов редуктора равна
 или
или
 = 0,46 % < 2,5, что допустимо.
= 0,46 % < 2,5, что допустимо.
3 Геометрический расчет редуктора
3.1 Крутящие моменты на валах редуктора
Коэффициент полезного действия редуктора равен отношению мощности на выходном и входном валах редуктора:
 (12)
(12)
где Рвых, Р1 – мощность на выходном и ведущем валах редуктора, Вт;
wвых, wном – соответственно угловые скорости в рад/с выходного и ведущего вала редуктора, об/мин.;
Мн, Т1 – соответственно момент нагрузки (крутящий момент на выходном валу) и крутящий момент на ведущем валу, Н×м.
Из формулы (10) с учетом формулы (6) получим
 (13)
(13)
Определим вращающий момент на валу первого редуктора по формуле (11):
Крутящий момент на валу 1
 Нм
Нм
Крутящий момент на валу 2 определим по формуле:
 ,
(14)
,
(14)
 Нм
Нм
Крутящий момент выходного на третьем валу
 ,
(15)
,
(15)
 Нм
Нм
3.2 Определение параметров цилиндрических зубчатых передач
Зубчатые колеса ступени имеют одинаковый модуль, который определяют из расчетов на прочность. Расчет модуля для прямозубой и косозубой цилиндрической передачи производят исходя из условия прочности зубьев наиболее нагруженного в зацеплении меньшего колеса ( шестерни) на изгиб.
Величина
коэффициента ширина венца колеса
 ,
равного отношению ширины b
к его делительному диаметру d,
задаётся ориентировочно в пределах
,
равного отношению ширины b
к его делительному диаметру d,
задаётся ориентировочно в пределах
 .
.
При
выбранном значении параметра
 приближенное значение модуля в мм
вычисляется по формуле:
приближенное значение модуля в мм
вычисляется по формуле:
 ,
мм (16)
,
мм (16)
где,
 - вспомогательный коэффициент, по ГОСТ
21354-87 для прямозубых цилиндрических
передач Км=14, для косозубых –
Км=12,5;
- вспомогательный коэффициент, по ГОСТ
21354-87 для прямозубых цилиндрических
передач Км=14, для косозубых –
Км=12,5;
 -
число зубьев зубчатого колеса;
-
число зубьев зубчатого колеса;
Т – крутящий момент в Нм, приложенный к рассматриваемому колесу;
 - коэффициент, учитывающий неравномерность
распределения нагрузки по ширине венца,
зависит от расположения опор и выбранного
параметра
- коэффициент, учитывающий неравномерность
распределения нагрузки по ширине венца,
зависит от расположения опор и выбранного
параметра
 .
Для колеса, расположенного между опорами,
значение КF равно:
.
Для колеса, расположенного между опорами,
значение КF равно:
 0,2; 0,3; 0,4; 0,5;
0,2; 0,3; 0,4; 0,5;
 1,05; 1,08; 1,10; 1,13;
1,05; 1,08; 1,10; 1,13;
 – коэффициент, учитывающий форму зуба,
значения его зависят от числа зубьев
колеса и равны:
– коэффициент, учитывающий форму зуба,
значения его зависят от числа зубьев
колеса и равны:
 17; 20; 25; 30; 40;
17; 20; 25; 30; 40;
 4,26; 4,09; 3,90; 3,80; 3,70;
4,26; 4,09; 3,90; 3,80; 3,70;
 – допускаемое напряжение материала
зубьев на изгиб в МПа, при базовом числе
циклов нагружения, его значения для
некоторых материалов равны:
– допускаемое напряжение материала
зубьев на изгиб в МПа, при базовом числе
циклов нагружения, его значения для
некоторых материалов равны:
сталь 35; 40; 45; 40Х; бронза БрАЖ9-4; БрОФ10-1;
 ,
МПа 160; 170; 180; 200; 80; 50.
,
МПа 160; 170; 180; 200; 80; 50.
Вычисленный по формуле (5.4) модуль округляют до ближайшего значения из стандартного ряда модулей. Величины рекомендуемого ГОСТом модуля зацепления в мм приведены ниже
1-й ряд 0,5; 0,6; 0,8; 1,0; 1,25; 1,5; 2; 2,5; 3; 4; 5; 6; 8.
2-й ряд 0,55; 0,7; 0,9; 1,125; 1,375; 1,75; 2,25; 2,75; 3,5; 4,5; 5,5; 7;9.
1й ряд следует предпочитать 2-му.
Для определения модуля зацепления выбираем материал, из которого изготавливается колесо. В данном случае выбираем сталь45.
 мм
мм
Зная материал колеса и его крутящий момент, выбираем модуль зацепления m=2,23 мм. Данный модуль округляем до ближайшего большего табличного значения и получаем m=2,5.
После определения модуля рассчитываем остальные параметры цилиндрической зубчатой прямозубой передачи.
Делительный диаметр прямозубого колеса определяется по формуле:
 (17)
(17)
Для рассчитываемой зубчатой передачи делительный диаметр прямозубого колеса равен:
-
шестерни:
 мм;
мм;
-
колеса:
 мм.
мм.
Межосевое расстояние цилиндрической зубчатой передачи равно полусумме делительных диаметров колеса d2 и шестерни d1. и находится по формуле
(18)
Межосевое расстояние цилиндрической зубчатой передачи равно:
 мм
мм
Ширина венца цилиндрического зубчатого колеса определяется по формуле
 (19)
(19)
где
 коэффициент ширины зубчатого венца
колеса относительно межосевого расстояния
принимают в зависимости от положения
колес относительно опор: при несимметричном
расположении 0,25…0,4.
коэффициент ширины зубчатого венца
колеса относительно межосевого расстояния
принимают в зависимости от положения
колес относительно опор: при несимметричном
расположении 0,25…0,4.
Ширина
венца цилиндрического зубчатого колеса
в соответствии с формулой 17 при выбранном
значении
 равна:
равна:
 мм
мм
Диаметры вершин dа и впадин df зубьев цилиндрических зубчатых колес определяются по формулам
 (20)
(20)
 (21)
(21)
где hа - высота головки зуба (hа=m);
h f
- высота ножки зуба (при m 1,0
h f=1,25m;
при m<1.0 h
f=1.35m).
1,0
h f=1,25m;
при m<1.0 h
f=1.35m).
Наружные диаметры (диаметр вершин) зубчатых колес согласно формулам 18 и 19 равны:
-
шестерни:
 мм;
мм;
 мм;
мм;
-
колеса:
 мм;
мм;
 мм.
мм.