

Тема 2 – «Энергетическая установка,
как объект автоматического регулирования»
Объект регулирования является главным звеном в АСР, его свойства существенным образом влияют на характер регулирования.
Каждый объект регулирования можно охарактеризовать одним или несколькими количественными или качественными величинами (температура, мощность, скорость и др., которые могут изменяться в широких пределах, причем чаще всего законы этих изменений во аремени произвольные и носят случайный характер.
Пример. Энергетические установки, как объекты регулирования могут быть весьма разнообразными. Объектом регулирования может быть как сама энергетическая установка, например газовая и паровая турбины, паровые котлы, компрессоры, кондиционеры, теплообменные аппараты, пневматические и гидравлические емкости, так и отдельные их узлы и устройства.
2.1. Классификация объектов регулирования и их структура.
По своей структуре и функциональной сложности объекты подразделяются на простые и сложные.
Простые объекты регулирования имеют в основе одну регулируемую величину, например температуру, давление, число оборотов и тд..
В большинстве случаев объекты регулирования являются сложными, в которых требуется одновременно регулировать несколько параметров различных или однородных физических величин.
Пример. В качестве примера сложного объекта можно представить котельную установку, в которой регулированию подлежат одновременно три параметра: уровень воды в барабане, давление пара и соотношение топливо-воздух.
Состояние объекта регулирования определяется рядом величин и характеризуются как воздействием на объект внешней среды, так и протекающими процессами внутри самого объекта.
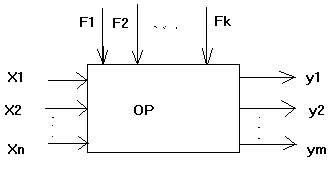 Величины,
характеризующие воздействие и состояние
объекта регулирования приведены на
схеме рис.2.1.
Величины,
характеризующие воздействие и состояние
объекта регулирования приведены на
схеме рис.2.1.
Рисунок 2.1. Виды воздействий и состояний объекта регулирования
На схеме обозначены:
![]()
![]() - совокупность регулируемых величин;
- совокупность регулируемых величин;
![]() -
совокупность регулирующих воздействий;
-
совокупность регулирующих воздействий;
![]() -
совокупность возмущающих воздействий.
-
совокупность возмущающих воздействий.
Если
объект регулирования характеризуется
одной регулируемой величиной y
и одним регулирующим воздействием x,
то есть векторы
![]() и
и
![]() имеют по одной координате, то такой
объект, как это было сказано выше,
называетсяпростым
или односвязанным.
имеют по одной координате, то такой
объект, как это было сказано выше,
называетсяпростым
или односвязанным.
Пояснение. Для таких объектов регулирования в качестве автоматических систем регулирования, используются автоматические системы стабилизации, т.е. действие которых основано на принципе отклонения. На их работу не влияет число входных возмущающих воздействий F{F1 …Fk}, так как все они, в большей или меньшей степени, компенсируются одним регулирующим воздействием x.
Если в объекте подлежит регулирования не одна, а несколько выходных величин y{y1…yn}, то возможно построение АСР отдельно для каждой из них. Качество регулирования будет высоким, если между регулируемыми параметрами объекта отсутствуют связи.
Пример: объектом регулирования является аппарат, в котором одновременно регулируется уровень жидкости и давление в нем.
Если в объекте регулирования имеются связи между отдельными регулируемыми величинами y и регулирующим воздействием x, т.е. имеются несколько (рис.2.2.) взаимно связанных координат векторов y и x, то такие объекты называются многосвязанными.
Р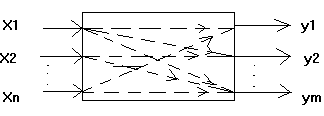 исунок
2.2. Параметрическая схема многосвязанного
объекта регулирования.
исунок
2.2. Параметрическая схема многосвязанного
объекта регулирования.
В представленном на рисунке объекте состояние размерных величин определяется функциональной связью: y1=f(x1, xn), y2=f(x1, x2); ym=f(x1, x2, xm).
Для таких объектов применяются системы связанного регулирования которые позволяют поддерживать на заданном уровне связанные между собой величины путем воздействия на одино из регулирующих воздействий. В этом случае, если автоматические регулирующие устройства будут управлять отдельно каждый из взаимосвязанных величин, то такое регулирование приведет к ухудшению общего процесса регулирования объекта.
Пример. регулирование заданной концентрации раствора и его температуры; регулирование количества вещества и его плотности.
Объекты регулирования подразделяются на объекты с сосредоточенными и распределенными параметрами.
Объекты с сосредоточенными параметрами это такие, в которых регулируемая величина y в состоянии равновесия объекта имеет везде одинаковые значения.
Примерами таких объектов в холодильных энергетических установках могут служить конденсаторы, где регулируемой величиной является давление конденсации Рк, циркуляционный ресивер с регулируемой величиной – уровень жидкого холодильного агента.
Динамические свойства объектов регулирования с сосредоточенными параметрами описываются обыкновенными дифференциальными уравнениями с постоянными коэффициентами.
Объектами с распределенными параметрами называются такие, в которых регулируемая величина y в равновесном или переходном режимах имеет неодинаковые значения в различных точках объекта. В реальных объектах регулируемая величина обычно заметно изменяется в зависимости от места измерения.
Пример: К объектам с распределенными параметрами можно отнести трубопроводы по которым перекачивается жидкость, холодильные камеры в которых температура воздуха возле испарителя всегда ниже чем в удаленных от него местах.
Динамические свойства таких объектов описываются дифференциальными уравнениями в частных производных. Для упрощения расчетов в большинстве случаев за регулируемую величину принимается среднее ее значение yср, сосредоточенное в одной точке (температура в середине холодильной камеры).