

1. Виды управляющих алгоритмов в
системах автоматического регулирования
В холодильной и криогенной технике, а также в системах кондиционирования воздуха, широкое распространение получили промышленные автоматические регуляторы, реализующие различные законы регулирования.
Уравнение регулятора, отображающее закон его регулирования, устанавливает зависимость формирования управляющего (выходного) сигнала U(τ), воздействующего на регулирующий орган РО, от отклонения регулируемой величины Δy (входного сигнала) от заданного значения.
Таким образом, закон регулирования – это вид математической зависимости между выходной и входной величинами регулятора.
Упрощенная структура автоматической системы регулирования приведена на рис. 3.1.
Регулируемая величина y объекта автоматизации, значение которой в текущий момент времени обозначен yт, поступает на вход элемента сравнения ЭС регулятора и сравнивается с заданным значением yзад. На выходе ЭС формируется сиг-нал рассогласования Δy = yзад - yт, величина которого является исходными данными для формирования управляющего сигнала. По значению Δy и виду закона

Рис. 3.1.Функциональная схема АСР
регулирования, заложенного в усилитель-формирователь УФ, на выходе автоматического регулятора АР формируется сигнал управления U, параметры которого определяют поведение регулирующего органа РО (скорость и величину перемещения).
Входная величина объекта регулирования x (вещество или энергия), влияющая на состояние регулируемой величины y, под воздействием РО, преобразуется в регулирующее воздействие xр, способные скомпенсировать возмущение G, отклонившее регулируемую величину от заданного значения.
По виду управляющего сигнала, законы регулирования подразделяются на дискретные или позиционные (двух-, трех- и многопозиционные), и непрерывные: пропорциональный (П), интегральный (И), дифференциальный (Д), и их комбинации: пропорционально-интегральный (ПИ), пропорционально-дифференциальный (ПД) и пропорционально-интегрально-дифференциальный (ПИД). В соответствии с этими законами, непрерывные промышленные регуляторы обозначаются как П-регулятор, ПИ-регулятор, ПД-регулятор и ПИД-регулятор, а дискретные регуляторы получили название: двух-, трех- или многопозиционные регуляторы.
Регуляторы с различными законами регулирования имеют свои, свойственные им, переходные процессы, в результате которых происходит перемещение регулирующего органа и изменение подачи вещества или энергии на объект регулирования.
Для обеспечения требуемого качества технологического процесса в объекте регулирования, в переходном режиме, выбирается тип регулятора и осуществляется расчет его настроечных параметров. Расчет параметров настройки регулятора производится по динамическим показателям объекта регулирования: постоянной времени Тоб и величине запаздывания τоб.)
Двухпозиционный закон регулирования.
Двухпозиционные регуляторы это такие, у которых выходной сигнал U имеет два фиксированные значения «включено» или «выключено», а регулирующий орган может принимать только одно из двух положений «открыто» или «закрыто».
При непрерывном изменении входного сигнала y и достижении им крайнего, например, максимального значения ymax происходит срабатывание регулятора и на его выходе скачком появляется сигнал U=1. Регулирующий орган занимает при этом крайнее положение в пределах хода, например, открыт на 100% (рис. 3.6). Изменение входного сигнала в обратную сторону до значения ymin приводит к отключению сигнала на выходе регулятора (сигнал U=0) и перемещению регулирующего органа в другое крайнее положение, например, закрытое, т.е. 0% ХПО.
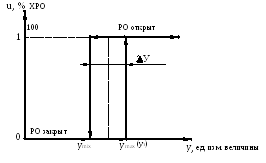
Рисунок 3.6. Статическая характеристика двухпозиционного регулятора
Как было показано выше, РдП-регулятор описывается нелинейным (дискретным) уравнением вида:

(3.1)
Разность значений регулируемой величины, при которых происходит переключение выходного сигнала Рдп-регулятора, является настроечным параметром и называется зоной нечувствительности или дифференциалoм.
Дифференциал Рдп-регулятора:
Δу = ymax – ymin , (3.2)
Управляющее воздействие двухпозиционного регулятора реализуется путем включения и отключения исполнительных устройств, например, приводных двигателей компрессоров, насосов, вентиляторов, соленоидных вентилей, моторных исполнительных механизмов и т.д.
Процесс двухпозиционного регулирования в любом статическом одноемкостном объекте, обладающем запаздыванием, изображен на рис. 3.7.
У
Рисунок 3.7. График двухпозиционного регулирования в статическом объекте.
Обозначения на графике: У – регулируемая величина объекта; τ – время; Х – степень открытия соленоидного вентиля, %; ΔУд – дифференциал двухпозиционного регулятора в значении регулируемой величины (заданный дифференциал); Уд.н, Уд.в – соответственно нижнее и верхнее граничные значения дифференциала; ΔУз – диапазон поддержания регулируемой величины с запаздыванием (фактический дифференциал); Уз.н, Уз.в – соответственно нижнее и верхнее граничные значения заданного диапазона; Уу.с,Уу.в – установившееся значение регулируемой величины при ее снижении и возрастании; τц – время цикла колебания регулируемой величины; τс, τв – части времени цикла при снижении и возрастании регулируемой величины с учетом запаздывания объекта; τд.с., τд.в. – составляющие времени снижения и возрастания регулируемой величины, соответствующие величине дифференциала; τз.с., τз.в. – составляющие времени снижения и возрастания регулируемой величины, обусловленные величиной запаздывания объекта регулирования.
Рассмотрим рабочий процесс регулирования температуры в холодильной камере, обозначенный величиной y.
Из рис. 3.7 видно, что вначале процесса регулирования соленоидный вентиль СВ закрыт, т.е. х=0% и регулируемая величина (температура в камере) повышается. Так как объект обладает свойством самовыравнивания, то при отсутствии регулятора температура в камере установилась бы на значении yу.р. Однако, при повышении температуры до значения yд.в. (т.А) двухпозиционный регулятор включает соленоидный вентиль (х=100%) подачи холодильного агента в испаритель. Учитывая, что объект обладает запаздыванием, то температура не начинает сразу понижаться, а продолжает расти до значения yз.в. (т.В). Дойдя до этого значения, температура начинает понижаться и при отсутствии регулятора она достигла бы установившегося значения yу.с. При снижении температуры до значения yд.н. (т.Д) регулятор формирует сигнал на закрытие СВ, однако регулируемая величина в течение времени запаздывания τз.с. продолжает понижаться, достигая значения yз.н. (т.Е). Достигнув значения yз.н., температура вновь будет повышаться и достигнув значения yд.в. (т.L) регулятор открывает СВ (х=100%), но в течение времени запаздывания τз.в. температура будет продолжать расти, достигая значения yз.в. (т.О), а затем вновь ее значение начнет понижаться, и т.д.
Ответ(2,5балла)12Пояснение. При двухпозиционном регулировании Рдп–регулятор настроен на дифференциал Δyд, однако фактическое изменение регулируемой величины определяется диапазоном Δyз из-за наличия запаздывания в объекте.
Рабочий и нерабочие режимы при двухпозиционном регулировании, характеризующие соответственно время снижения и нарастания температуры, сменяют друг друга в течение всего времени работы автоматической системы регулирования, т.е. переходной процесс носит характер непрерывных колебаний. Спадающая и возрастающая ветви полупериодов колебаний являются участками кривых разгона.)
В свою очередь, спадающий участок характеристики, в данном случае, определяет рабочий режим регулятора, когда СВ открыт (τрб или τс) и осуществляется подача жидкого холодильного агента на испаритель, а возрастающая – нерабочий режим (τст или τв), - когда объект находится только под действием теплопритоков
Колебания такого рода называются автоколебаниями, которые характеризуются следующими параметрами:
- периодом автоколебаний (называется также временем цикла):
τц = τрб + τст, (3.3)
где τрб – длительность рабочей части цикла;
τст – длительность нерабочей части цикла;
- частотой автоколебаний (частотой включения авторегулятора в час):
fa = 1/τц; (3.4)
- коэффициентом рабочего времени:
Крв = τрб/τц; (3.5)
- амплитудой колебаний:
Аф = ymax-ymin. (3.6)
Выводы.К достоинствам двухпозиционного регулирования следует отнести быстродействие по отработке рассогласования по отклонению регулируемой величины от заданного значения, невысокая стоимость, простота технической реализации и обслуживания.
К недостаткам двухпозиционного регулирования относится недостаточная точность регулирования, колебательный режим процесса регулирования и наличие пусковых перегрузок машин и аппаратов, являющихся объектами автоматизации.
ЛЕКЦИЯ-7. Тема 3 – «Автоматические регулирующие устройства. Непрерывные законы регулирования»