

на телефон1
.pdfОглавление
1. |
Понятие управления. Автоматическое и автоматизированное управление. САУ и САР. Показать на |
|
|
примере типовые функциональные элементы замкнутой САУ. ....................................................................... |
2 |
||
2. |
Классификация САУ.......................................................................................................................................... |
3 |
|
3. |
Математическое описание САУ. Передаточная функция.............................................................................. |
4 |
|
4. |
Временные и частотные характеристики САУ ............................................................................................... |
5 |
|
5. |
Классификация типовых динамических звеньев. Безынерционное звено. Апериодическое звено 1-го |
|
|
рода. ......................................................................................................................................................................... |
6 |
||
8. |
Дифференцирующие звенья.............................................................................................................................. |
7 |
|
6. |
Апериодическое звено 2-го порядка. Колебательное и консервативное звено. .......................................... |
9 |
|
7. |
Интегрирующие звенья ................................................................................................................................... |
11 |
|
9. |
Виды соединений звеньев. Замкнутые и разомкнутые САУ. Преобразования структурных схем. ........ |
13 |
|
10. |
Понятие устойчивости САУ. Ее характерные особенности. ..................................................................... |
15 |
|
11. |
Условие устойчивости. Теоремы устойчивости для линеаризованных систем....................................... |
16 |
|
12. |
Алгебраические критерии устойчивости на примере критерия Гурвица................................................. |
17 |
|
13. |
Частотные критерии устойчивости. Критерий Михайлова и следствие из него. .................................... |
18 |
|
14. |
Критерий Найквиста. Логарифмический критерий устойчивости. Запасы устойчивости. .................... |
19 |
|
15. |
Оценка качества процесса управления. Статические свойства САУ. Точность в статическом режиме. |
||
................................................................................................................................................................................ |
|
|
20 |
16.Методы анализа качества переходного процесса. ....................................................................................... |
21 |
||
17. |
Синтез САУ. Классификация регуляторов. П- и И- регуляторы. ............................................................. |
23 |
|
18. |
ПИ-, ПД- и ПИДрегуляторы. ...................................................................................................................... |
24 |
|
19. |
Улучшение качества процесса управления. Использование корректирующих звеньев. Изменение |
|
|
свойств САУ путем введения интегрирующих и дифференцирующих звеньев. .......................................... |
25 |
||
20. |
Изменение свойств различных звеньев путем их охвата обратной связью. ............................................ |
26 |
|
21. |
Нелинейные САУ. Основные особенности. Типы нелинейных статических характеристик. ............... |
27 |
|
22. |
Цифровые САУ .............................................................................................................................................. |
27 |
|
1. Понятие управления. Автоматическое и автоматизированное управление. САУ и САР. Показать на примере типовые функциональные элементы замкнутой САУ.
Управление — совокупность действий, обеспечивающих протекание процесса с целью достижения требуемых результатов.
Автоматизированные системы управления (АСУ) — с участием человека в контуре управления;
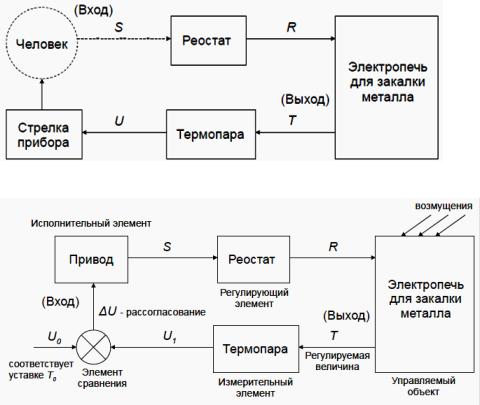
Системы автоматического управления (САУ) — без участия человека в контуре управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
Пример:
Система регулирования температуры в электропечи с ручным управлением (человек плохой фактор)
Применяется: космос, реактивные самолеты, АЭС.
Система автоматического регулирования температуры в электропечи Применение: холодильник (температура).
Типовые функциональные элементы САУ
●Чувствительные (измерительные) элементы
●Элементы сравнения
●Усилительные элементы – усиливают сигнал (на вход привода можно поставить)
●Исполнительные элементы
●Регулирующие элементы объекта управления
●Корректирующие элементы
2. Классификация САУ.
Классификация по характеру изменения величин: Системы непрерывного действия
Системы импульсного действия (AM, ФМ, ЧМ, ...)
Системы дискретного действия (01001011110101) (входная величина изменяется скачками)
Системы релейного действия (вступающие в работу, когда заданная величина достигает определенного значения)
Классификация по математическим признакам: Линейные системы Нелинейные системы Существенно нелинейные
Классификация по типу ошибки в статике:
Статические САУ (поведение в установившемся режиме) Астатические САУ Классификация по алгоритмам функционирования (по назначению): Системы стабилизации
Всистемах стабилизации обеспечивается неизменное значение управляемой величины при всех видах возмущений.
Системы слежения Следит за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения
выходной величины САУ. Например, рука робота, повторяющая движения руки человека. Системы программного управления
Впрограммных системах обеспечивается изменение управляемой величины в соответствии с программой Системы телеуправления Системы самонаведения (снаряда), сопровождения (орудия), автопилотирования
Всамонастраивающихся системах ЗУ ищет такое значение управляемой величины, которое в каком-то смысле является оптимальным.
Системы компенсационных измерений По виду цикла управления:
разомкнутые (входная величина не изменяется и отсутствует обратная связь м/у выходом и входом системы управления)
замкнутые (большая точность регулируемых параметров при изменении возмущающих воздействиях) По характеру изменения регулируемого параметра:
стабилизирующие (система автоматического регулирования) программные (пример: стиральная машинка)
следящие (когда мы знаем, какая должна быть величина) адаптивные (экстремальные и самонастраивающиеся) По характеру внутренних динамических процессов:
линейные и нелинейные (разница между входом и выходом) непрерывного, дискретного (импульсные и цифровые) релейного действия По принципу управления:
по отклонению регулируемого параметра (электропечь) по возмущению (противофаза)
комбинированные
3. Математическое описание САУ. Передаточная функция.
Математическое описание САУ
●Разбиение на отдельные звенья для облегчения аналитического описания в виде дифф. уравнений, связывающих входные и выходные величины
●Для линейных САУ справедлив принцип суперпозиции (суперпозиция возмущений)
●Элементы САУ, различные по физической природе и конструктивному исполнению, могут обладать одинаковыми динамическими свойствами
●Для описания САУ вводится понятие динамического звена системы
●Звено обладает свойством направленности действия
Динамические звенья – элементы, отличающиеся только видом дифф. уравнений. Уравнение динамики
Пример: электрический четырехполюсник (LRC-цепь)
Передаточный коэффициент:
Преобразование Лапласа Пусть есть исходная функция (оригинал)
Изображение (прямое одностороннее преобразование Лапласа):
-p — оператор комплексного переменного (комплексная частота): Краткое обозначение:
Уравнение динамики в пространстве Лапласа Исходное уравнение:
Уравнение динамики, после преобразования Лапласа:
Уравнение линейной САУ в общем случае:
Передаточная функция - отношение изображения выходной величины к изображению входной величины:
- условие физической осуществимости Возвращение в исходное пространство Обратное преобразование Лапласа:
Использование таблиц соответствия
Разложение функции изображения на простые дроби
4. Временные и частотные характеристики САУ
Временные характеристики показывают закон изменения во времени регулируемой (выходной) величины САУ (элемента) при изменении внешнего воздействия по определенному закону и при нулевых начальных условиях.
Временные характеристики САУ ( - как реагирует)
●Переходная функция h(t) — реакция системы на единичный ступенчатый сигнал
1(t)=
●Импульсная переходная функция w(t)- реакция системы на единичный импульс
Функц я еса, или м ульсная е е одная а акте ст ка  , пред-ставляет собой реакцию САУ
, пред-ставляет собой реакцию САУ
(элемента) на единичную импульсную функ-цию, поданную на ее вход
Единичный импульс, т.к. площадь равна 1
Частотные характеристики САУ определяют зависимость между входной и выходной величинами в установившемся режиме при гармоническом воздействии.
Частотные характеристики САУ ( - как реагирует на сигналы)
●Входной сигнал (подается гармонический сигнал):
●Выходной сигнал (после окончания переходного процесса):
●Комплексная частотная функция (комплексный коэффициент усиления):
вых
вх
●Амплитудно-фазовая характеристика (АФХ):
●Амплитудно-частотная характеристика (АЧХ):
●Фазо-частотная характеристика (ФЧХ):
● АФХ (годограф) – геометрическое место точек конца вектора |
при |
Логарифмические частотные характеристики: |
|
●Логарифмическая амплитудно-частотная характеристика (ЛАЧХ):
-из-за удобства
●Логарифмическая фазо-частотная характеристика (ЛФЧХ)
●Значения частоты указываются в октавах и декадах (1 декада = 3,32 октавы)
Бел – логарифмическая единица, соответствующая десятикратному увеличению мощности. 1дБ = 0.1 Б
5. Классификация типовых динамических звеньев. Безынерционное звено. Апериодическое звено 1-го рода.
● Классификация звеньев по виду статической характеристики в установившемся режиме:
– позиционного (статического) типа:
– интегрирующего типа:
– дифференцирующего типа:
● Позиционные:
– Безынерционное (усилительное); – Апериодическое 1-го порядка (инерционное); – Апериодическое 2-го порядка; – Колебательное; – Консервативное ● Интегрирующие:
– Идеальное интегрирующее; – Интегрирующее с замедлением; – Изодромное ● Дифференцирующие:
– Идеальное дифференцирующее; – Дифференцирующее с замедлением Безынерционное звено – физически не реализуется, некое идеальное звено.
Примеры: рычаг, механический редуктор, широкополосный усилитель, делитель напряжения
●Временные характеристики:
●Частотные характеристики:
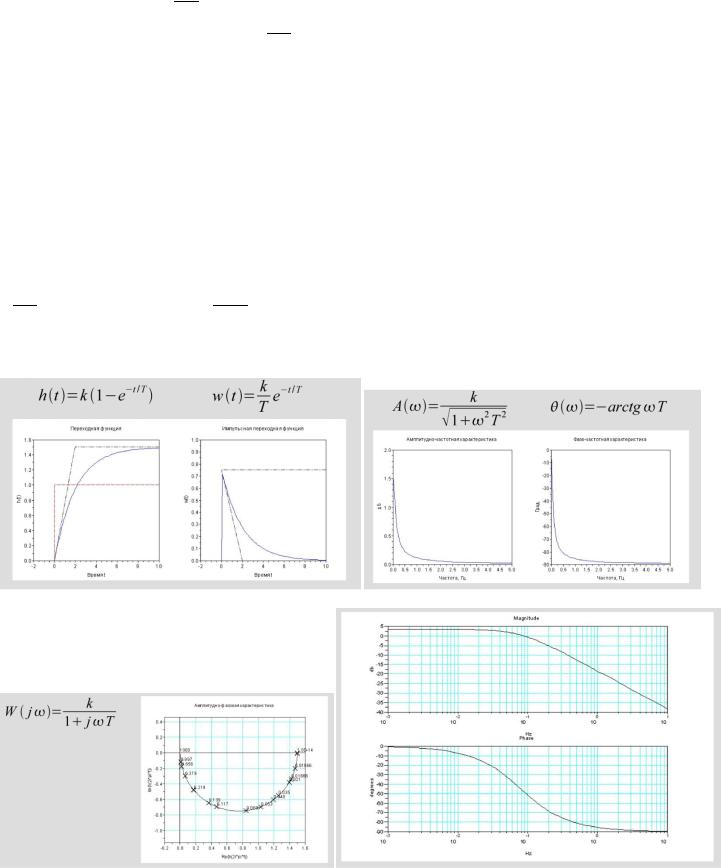
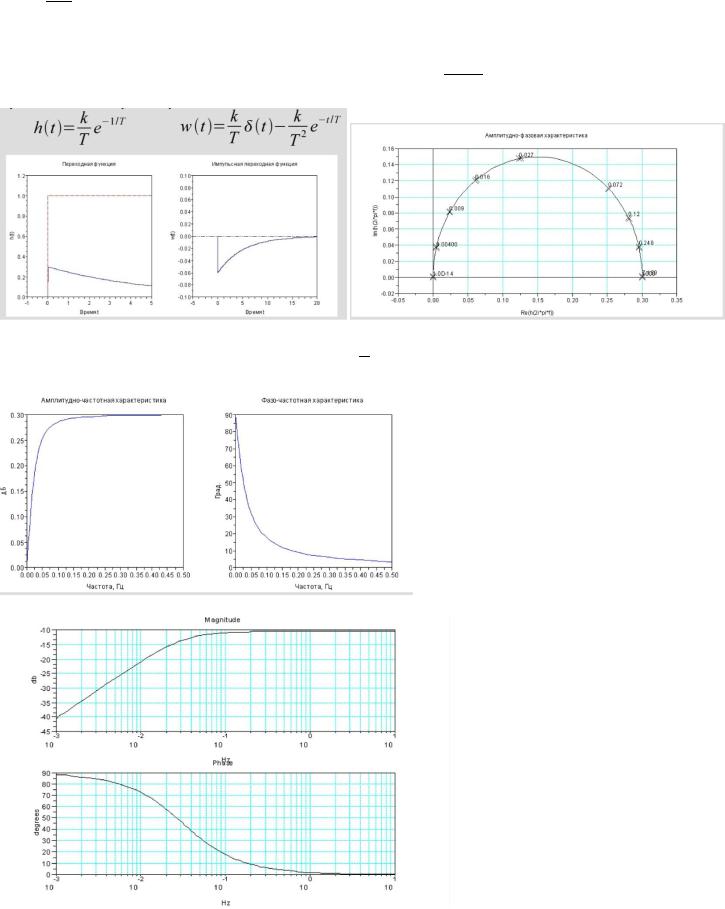
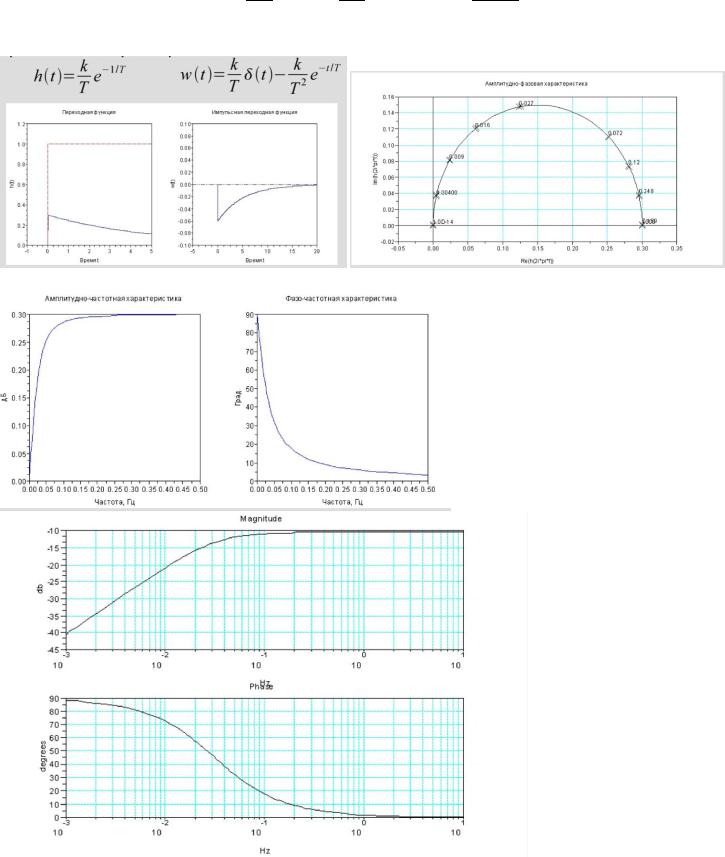
Апериодическое звено 1-го порядка – сходится монотонно.
Примеры: двигатель любого типа с механическими характеристиками в виде параллельных прямых, электрический генератор постоянного тока, RC- и LR-цепи
● Временные характеристики ● АЧХ и ФЧХ
● Амплитудно-фазовая характеристика |
● ЛАЧХ и ЛФЧХ |
8. Дифференцирующие звенья
Идеальное дифференцирующее звено
●Примеры: тахогенератор постоянного тока, операционный усилитель в режиме дифференцирования
●Временные характеристики:
●Временные характеристики
●Частотные характеристики:
●АЧХ и ФЧХ
● ЛАЧХ и ЛФЧХ
Дифференцирующее звено с Замедлением
● Примеры: электрические RC-, RL- и LСцепи |
|
● Временные характеристики |
●Амплитудно-фазовая характеристика |
● АЧХ и ФЧХ |
● ЛАЧХ и ЛФЧХ |
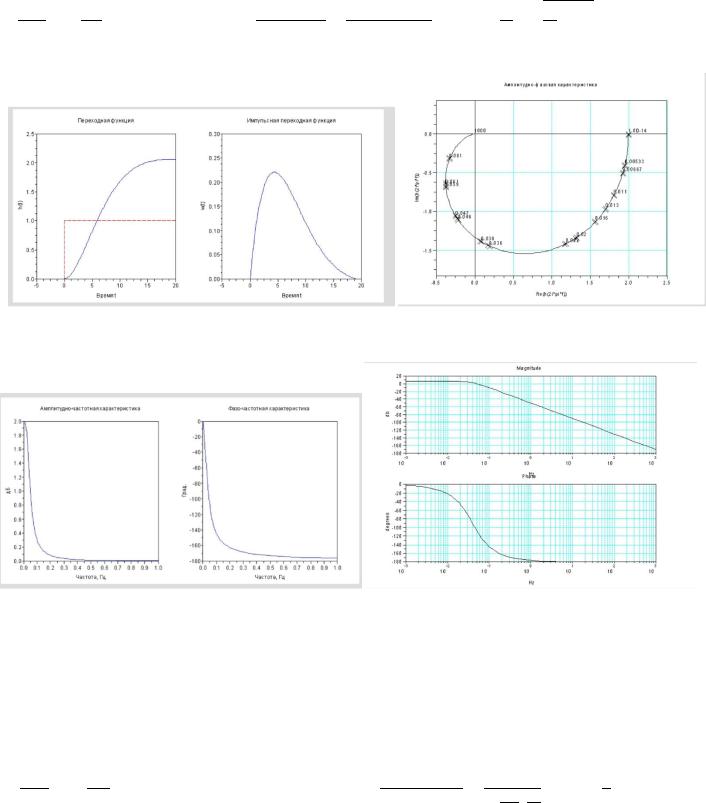
6. Апериодическое звено 2-го порядка. Колебательное и консервативное звено.
Апериодическое звено 2-го Порядка
● Пример: двигатель постоянного тока |
|
● Временные характеристики |
Амплитудно-фазовая характеристика |
● АЧХ и ФЧХ |
● ЛАЧХ и ЛФЧХ |
Колебательное звено Колебательный характер переходной функции определяется наличием в ней периодических функций синуса
и косинуса. Колебания будут затухать с течением времени, т.к. множитель при этих функциях  уменьшается с увеличением времени и стремится к нулю при (t→∞).
уменьшается с увеличением времени и стремится к нулю при (t→∞).
При μ=1 мнимая часть полюсов обращается в ноль. Звено имеет два одинаковых действительных полюса. Это будет уже не колебательное звено, а апериодическое звено второго порядка. Переходная функция при μ=1 будет монотонной:
При μ=0 получим звено, называемое консервативным.
коэф. затухания.
● Пример: колебательные RLC-цепи, двигатель постоянного тока (при определенных условиях) ● Временные характеристики ● Амплитудно-фазовая характеристика
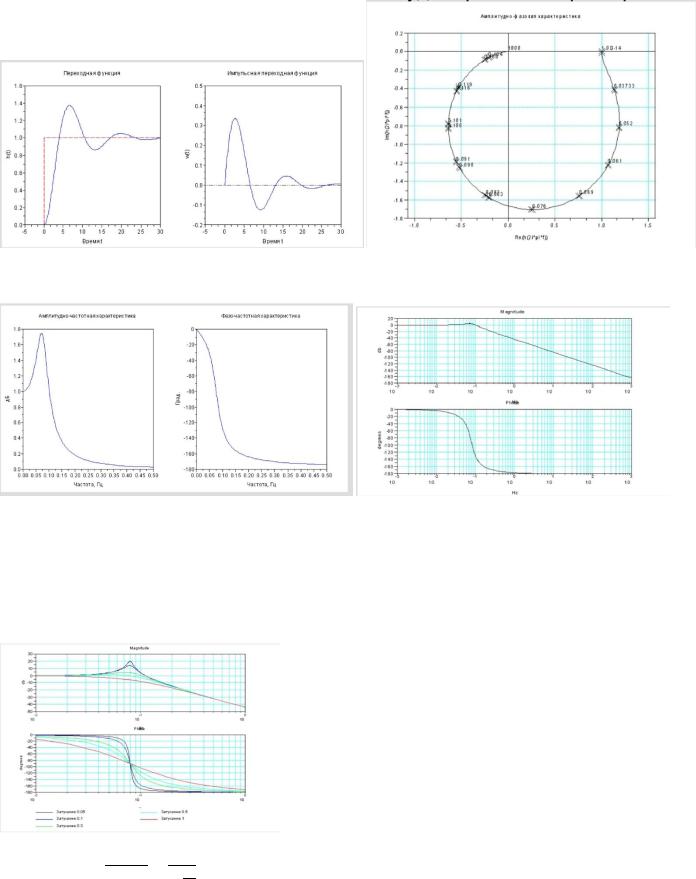
● АЧХ и ФЧХ |
● ЛАЧХ и ЛФЧХ |
При μ<0.707 на ЛАЧХ появляется точка максимума (резонансный пик). С уменьшением μ высота резонансного пика возрастает и при μ=0 стремится к бесконечности (при μ=0 ЛАЧХ имеет разрыв). Частота, на которой находится точка максимума ЛАЧХ, называется резонансной частотой. Резонансная частота находится вблизи частоты 1/Т.
Колебательное звено будет усиливать гармоническое воздействие резонансной частоты с максимальным коэффициентом усиления.
● Появление резонансного пика (ζ <0,707)
Консервативное звено – сохранение колебаний, они не затухают.
● Пример: колебательная RLC-цепь при R=0 |
|
● Временные характеристики |
● АЧХ и ФЧХ |