

на телефон1
.pdf16.Методы анализа качества переходного процесса.
1. Прямые методы – это непосредственное решение дифференциальных уравнений, которые описывают систему и выполнение графического построения переходного процесса. Эти методы наиболее точны и находят все более широкое применение.
Прямые показатели качества оценивают по переходным характеристикам. При этом прямые показатели качества делят на:
Основные:
1.Вид переходной характеристики.(колебательная, амплитудная и т. д.)
2.Время переходного процесса( tп )(длительность регулирования)
3.Величина наибольшего отклонения в переходном процессе – перерегулирование.( ,%)
4.Величина допустимой установившейся ошибки(∆, % от y∞).
5.Колебательность переходного процесса, характеризуется числом колебаний за время регулирования. Вспомогательные:
1.Время установления( t у )- время, за которое выходная величина достигает максимального значения.
2.Время запаздывания( t з ) – время, за которое выходная величина изменяется от 0 до 0.5установившегося значения.
3.Время нарастания(tнар) – время, за которое выходная величина изменяется от 10 до 90% своего установившегося значения.
2. Косвенные методы позволяют обойти непосредственное решение уравнений, описывающих систему. Применяют обычно следующие косвенные методы:
1.Корневые (основаны на факте зависимости переходного процесса от корней характеристического уравнения, таким образом, зная корни хар-го ур-ния, можно оценить вид и некоторые параметры переходного процесса).
2.Частотный (основан на взаимной связи переходных процессов и частотных характеристик САУ, их удобно использовать совместно с исследованием устойчивости по критерию Найквиста).
3.Интегральные (нацелены на получение общей оценки скорости затухания и величины отклонения
регулируемого параметра одновременно). Сущностью косвенных методов является:
-Замена точного управления динамики САУ приближенным за счет отбрасываемых слагаемых левой части, имеющих на нерасчетных частотах малые значения, а также замена сложной функции внешнего воздействия более простой функцией.
-Оценка качества процесса по распределению нулей и полюсов ПФ с использованием нормировочных диаграмм
-Использование интегральных оценок и метода стандартных коэффициентов при приближении некоего процесса к некоторому эталонному
-Оценка качества процесса по виду вещественной ЧХ
Замена точного управления приближенным является наиболее частым способом при косвенной оценке качества. Такая аналитическая аппроксимация может быть применена предварительно к ПФ.
По виду переходных процессов можно определить следующие показатели качества:
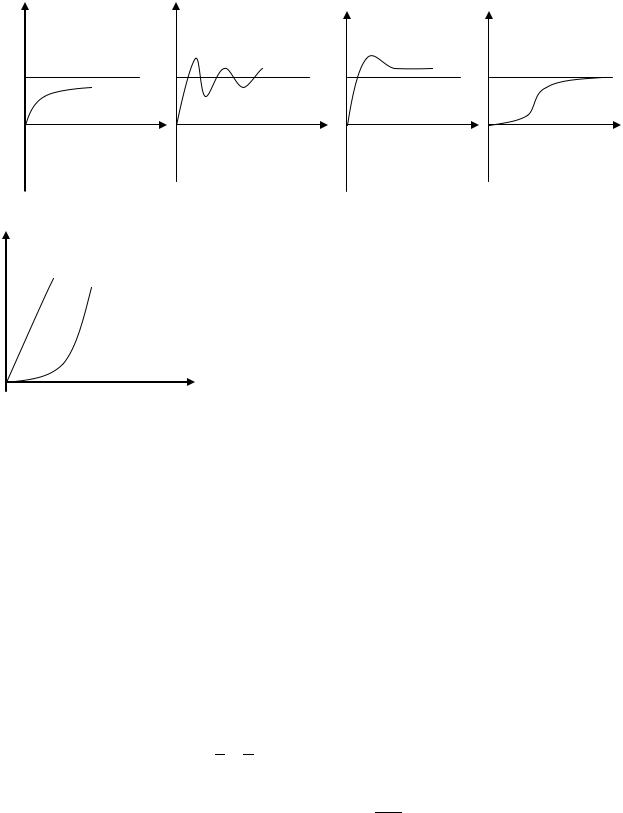
h(t) |
h(t) |
h(t) |
h(t) |
1
Монотонный |
Колебательный |
Апериодический |
S- образный |
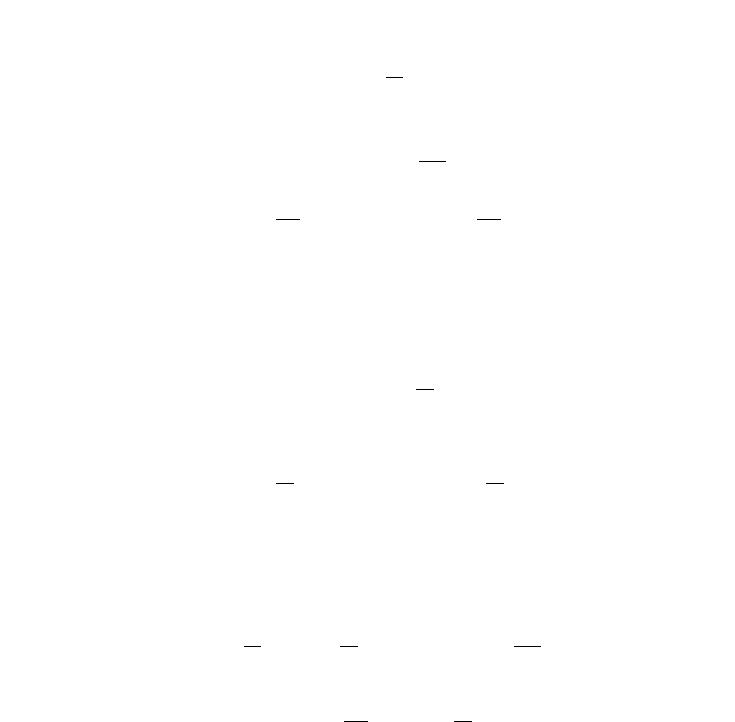
Это группа процессов статических объектов. В динамических объектах:
h(t)
1 - идеально интегрирующее звено
2 - реально интегрирующее звено
1 2
Основным показателем качества систем является установившаяся(статическая) ошибка. Допустимое значение статической ошибки ( уст ) не должно превышать 5% от hуст
●Прямые методы: – аналитические; – численные
●Косвенные методы: – корневые; – частотные (анализ АФХкритерий Найквиста с применением запасов устойчивости); – интегральные
Корневые методы
● Соответствие между корнями и составляющими переходного процесса:
Наличие комплексных корней указывает на склонность системы к колебаниям во время переходного
процесса. А |
и |
характеризуют скорость затухания соответствующей составляющей. Если можно |
выделить один корень, у которого модуль действительная часть намного меньше остальных, то он определяет характер и скорость затухания переходного процесса.
●- степень устойчивости (корневой показатель абсолютного затухания)
Корневой показатель колебательности:

17. Синтез САУ. Классификация регуляторов. П- и И- регуляторы.
Под синтезом САР понимают работу по расчету ее рациональной структуры и оптимальных параметров отдельных элементов. При решении задачи синтеза часть структуры системы, например, объект управления, регулирующие органы, средства измерения и т.д., известны. Неизвестной является регулирующая часть САР. Задачей математического синтеза является определение оптимального, т.е. наилучшего в данных условиях, алгоритма или закона регулирования.
Синтез САУ ● Основные подходы:
– инженерный синтез (определение оптимального закона регулирования и расчет параметров регулятора)
– техническая реализация САУ
– расчет корректирующих устройств ● Задачи инженерного синтеза:
–достижение требуемой точности
–обеспечение приемлемого характера переходных процессов Классификация регуляторов по принципу регулирования
по отклонению (рассогласованию) по нагрузке ( по возмущению) комбинированный
По виду функций выражающих алгоритм регулирования: Непрерывного действия(непрерывное регулирование) Прерывистого действия(по достижению определенного значения) По способу действия Прямого действия (исп. Энергия самого объекта)
Косвенного действия (исп. Энерния подводимая извне) По виду подводимой энергии Электрические Пневматические Гидравлические Механические
По зависимости регулируемой величины и перемещением регулирующего органа. ● П-регуляторы (пропорциональные или статические)
● И-регуляторы (интегральные или астатические)
● ПИ-регуляторы (пропорциональноинтегральные)
● ПД-регуляторы (пропорциональнодифференциальные)
● ПИД-регуляторы (пропорционально- интегрально-дифференциальные)
П-регуляторы – автоматический регулятор, у которого перемещение регулирующего органа пропорционально изменению регулируемого параметра.
●Использование жесткой Обратной Связи (за ее счет достигается пропорциональная зависимость, действует постоянно).
●Преимущества: простота конструкции, пропорциональность скоростей
●Недостатки: наличие статической погрешности (применение с неустойчивыми ОУ)
И-регуляторы- перемещение регулирующего органа пропорционально интегралу изменения регулируемого параметра.
-постоянная времени интегрирования
●Отсутствует внутренняя ОС
●Преимущества: простота конструкции, отсутствие статической погрешности● Недостатки: относительно невысокая скорость регулирования
18. ПИ-, ПД- и ПИДрегуляторы.
ПИ-регуляторы оказывают регулирующее воздействие. Регулятор косвенного действия.
ПИ-регулятор работает следующим образом: при возникновении сигнала рассогласования (Хзад.- Хизм.≠0) сразу вступает в работу П- составляющая и происходит перемещение исполнительного механизма пропорционально Кр(Хзад.- Хизм.). После этого вступает в
работу И-составляющая, которая перемещает исполнительный механизм по закону (1/Ти )·∫(Хзад.- Хизм.)dt до тех пор, пока Хзад.не
сравняется с Хизм.. Например: если t воды в чайнике изменилась от заданной t на 20°С, то П-составляющая подвинет ручку конфорки на 18°С, а И-составляющая уберет оставшихся 2°С разницы.
●Использование гибкой (изодромной, т.к. два параметра) ОС
●Для изодромного регулятора:
изодромная постоянная ● Преимущества: высокое быстродействие, отсутствие статической погрешности
ПД-регуляторы – Д-регулятор реагирует на скорость изменения регулируемого параметра.
В системе регулирования с ПД-регулятором дифференцирующее звено вычисляет скорость изменения ошибки, т.е. прогнозирует направление и величину изменения ошибки.
(коэф усиления пропорциональной части и коэф усиления дифференцирующей части)
●Структурная схема аналогична схеме для ПИ-регулятора
●Статический регулятор с предварением:
постоянная времени предварения
●В системе регулирования с ПД-регулятором обычно так же, как и в системе с П- регулятором существует статическая ошибка регулирования (если объект статический), но быстродействие у такой системы выше, чем у систем с П-, И-
иПИ- регуляторами.
ПИД-регуляторы – универсальный регулятор.
●Возможный вариант регулятора:
●Наиболее универсальный регулятор
Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которыхпропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Если какие-то из составляющих не используются, то регулятор называют пропорционально-
интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
19. Улучшение качества процесса управления. Использование корректирующих звеньев. Изменение свойств САУ путем введения интегрирующих и дифференцирующих звеньев.
Улучшение качества процесса управления
●Основные задачи: – повышение точности в типовых режимах; – обеспечение необходимого запаса устойчивости; – обеспечение необходимого быстродействия
●Пути решения: – подбор значений параметров; – изменение структуры системы, в том числе путем введения корректирующих (демпфирующих) звеньев Корректирующие звенья
●Последовательные
●Параллельные
●В виде местной обратной связи
●Эквивалентность корректирующих звеньев различного типа
Введение дифференцирующего звена в прямую цепь |
● Исходная передаточная функция САУ: |
● Эквивалентная передаточная функция:
Повышение точности в статическом режиме |
|
● Установившаяся ошибка: |
● Коэффициент статической ошибки: |
● Условие устойчивости (для звена 3 порядка):
Введение интегрирующих звеньев в прямую цепь
●Для одного интегратора
●Для двух интеграторов
●Для трех интеграторов
●При повышении точности путем введения интегрирующих звеньев также снижается запас устойчивости
20. Изменение свойств различных звеньев путем их охвата обратной связью.
Обратные связи
●Для установившегося режима: (скорректир. уравнение)
●Жесткая обратная связь (обычная и инерционная):
●Гибкая обратная связь (обычная и инерционная):
Охват обратной связью апериодического звена
●Жесткая ОС не изменяет структуру звена, но уменьшает его коэффициент передачи и постоянную времени, оказывая стабилизирующее действие
●Гибкая ОС не изменяет структуру звена и не влияет на коэффициент передачи, но увеличивает постоянную времени Охват обратной связью интегрирующего звена
●Жесткая ОС превращает идеальное звено в апериодическое, коэффициент передачи определяется коэффициентом ОС, при больших k постоянная времени мала
●Инерционная жесткая ОС превращает исходное звено в звено второго порядка, при больших k оно эквивалентно усилительному звену с введением производной
●Гибкая ОС не изменяет структуру звена, но уменьшает коэффициент передачи
Охват обратной связью колебательного звена
●Жесткая ОС не изменяет структуру звена, но уменьшает все его параметры
●Сильная гибкая ОС превращает исходное звено в последовательное соединение двух апериодических звеньев; слабая ОС не изменяет структуру звена, но увеличивает коэффициент демпфирования

21. Нелинейные САУ. Основные особенности. Типы нелинейных статических характеристик.
Нелинейную САУ можно представить в виде соединения двух частей (рис. 8.1, а) – линейной части (ЛЧ), описываемой линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами, и нелинейного элемента (НЭ). Нелинейный элемент является безынерционным, и его
входная  и выходная
и выходная  величины связаны между собой нелинейными алгебраическими уравнениями. Нелинейные САУ ● Основные особенности:
величины связаны между собой нелинейными алгебраическими уравнениями. Нелинейные САУ ● Основные особенности:
–не выполняется принцип суперпозиции
–качество переходного процесса зависит от величины возмущения
–возможность возникновения автоколебаний
–при рассмотрении устойчивости необходимо учитывать начальные условия и внешние воздействия ● Различают статическую и динамическую Нелинейность Нелинейные статические характеристики( зависит от напрвления изменения входнлй величины х)
● Однозначные( характеристика, которая не зависит от направления изменения входной величины х нелинейного звена):
–непрерывные(определяются в виде полинома)
–разрывные:
●нечувствительность
●ограничение
●идеальная релейная
●релейная с зоной нечувствительности
●Неоднозначные:
–люфт
–двухпозиционная релейная с гистерезисом
–трехпозиционная релейная с гистерезисом
Нелинейная статическая характеристика аналитически обычно выражается в виде степенных функций, степенных полиномов, дробных рациональных функций и более сложных функций
Нелинейные элементы в свою очередь подразделяют на: |
|
||
· |
элемент |
с сущест енно нел нейной стат ческой а акте |
ст кой; |
· |
элемент |
с несущест енно нел нейной стат ческой а акте |
ст кой; |
Несущественно нелинейная статическая характеристика — а акте ст ка, о с аемая не е ной д ффе енц уемой функц ей. Практически это математическое условие означает, что график функции y = f(x) должен иметь гладкую форму
Существенно нелинейная статическая характеристика — характеристика, описываемая функцией, имеющей
изломы или разрывы. существенно нелинейная статическая характеристика линеаризации не подлежит.
22. Цифровые САУ
Последовательность преобразования информации в цифровой системе.
С помощью аналогово-цифрового преобразователя (АЦП) непрерывное (аналоговое) воздействие u(t) преобразуется в цифровой код uk. ЦВУ на основании поступающей информации вырабатывает оптимальное задающее воздействие u'k. Последнее с помощью цифро-аналогового преобразователя (ЦАП) преобразуется в непрерывный сигнал u'(t) и поступает на элемент сравнения (ЭС) замкнутой системы, сигнал которого поступает на вход объекта управления (ОУ).
АЦП- аналого-цифровой преобразователь(на его выходепоследовательность чисел) После МПпоследовательность чисел, генерируемых с интервалом времени То
●Относятся к дискретным САУ
●Во многих случаях можно рассматривать цифровые САУ как непрерывные
●С помощью цифровых САУ можно реализовать более сложные и эффективные алгоритмы управления
●Системы непосредственного цифрового управления:
–централизованные: объект управления —преобразователи — коммутаторы — УВМ —ЦВМ более высокого уровня– распределенные: объект управления —преобразователи — УВМ (контроллеры) —ЦВМ более высокого уровня
–возможность обмена информацией между МПК и ЦВМ по локальной сети