

Int8 - элемент, преобразующий двоичные единицу и ноль в десятичные.
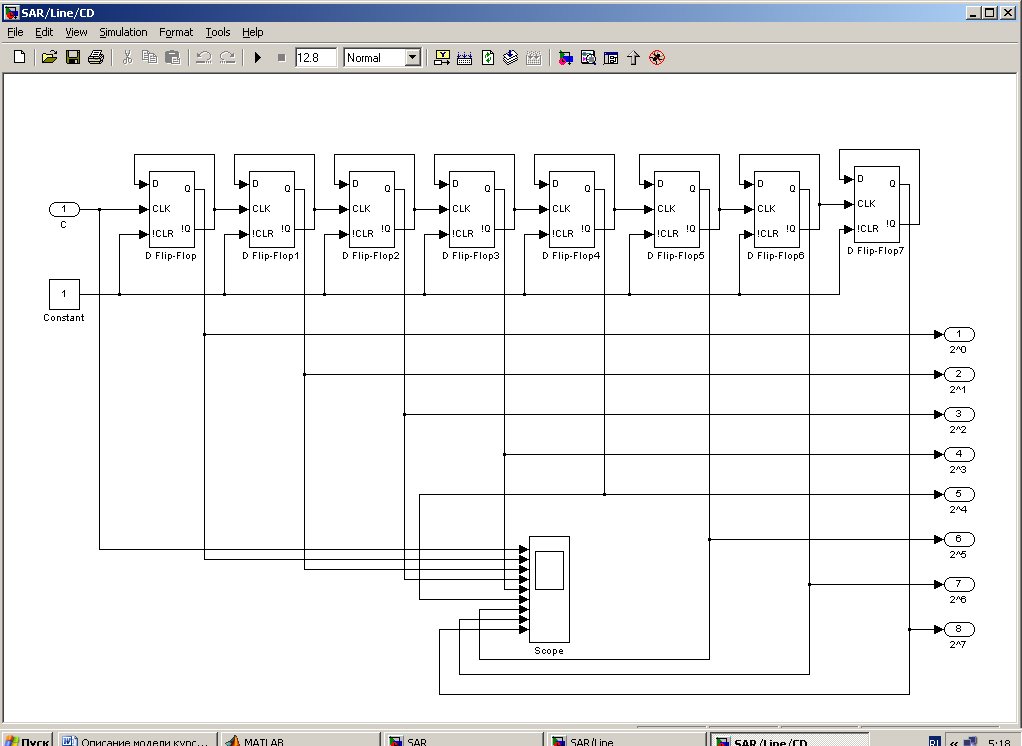
Рис. 8 Модель счетчика CD.
D Flip-flop – D-триггеры. В счетчике D-триггеры включены по схеме счетных триггеров для подсчета в двоичном коде количества поступающих на вход счетчика импульсов от генератора ошибок С (рис.1)
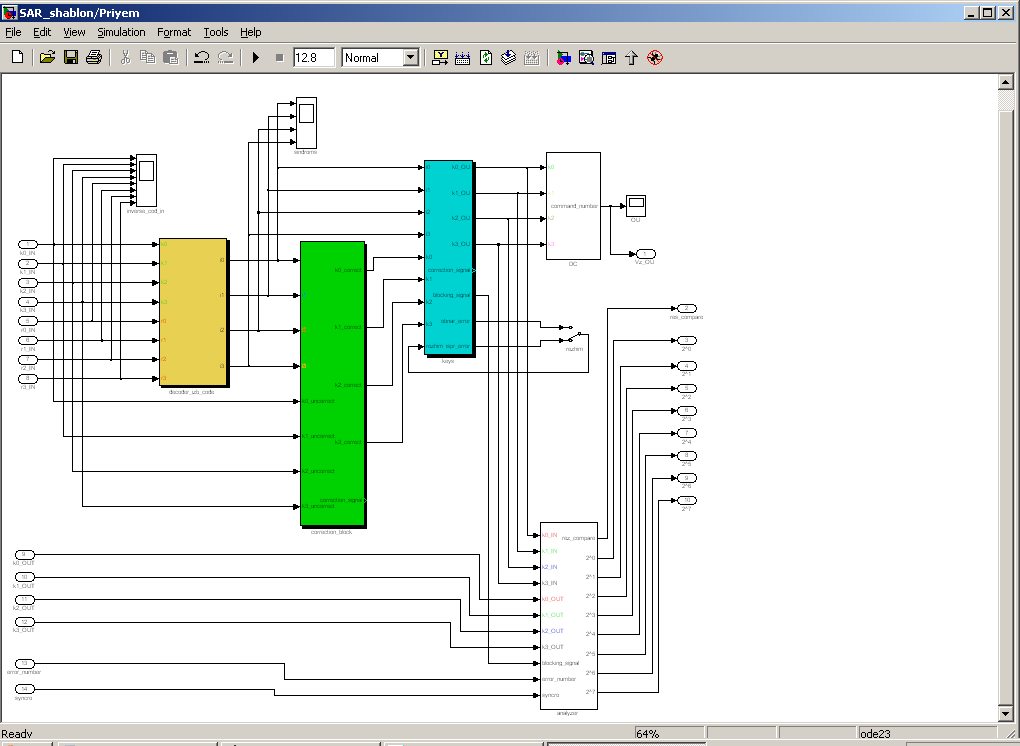
Рис. 9 Модель блока Priyem.
Decoder_izb_code – декодер избыточного кода.
Ключ rezhim – переключатель режимов работы декодера обнаружение/исправление ошибок.
Correction_block – схема коррекции информационных разрядов принятого сообщения в заданном помехозащитном коде.
Keys – схема распознавания одиночных и двойных ошибок.
Analyzer – автоматический двоичный счетчик ошибок заданной кратности.
DC- дешифратор принятых команд.
![]()
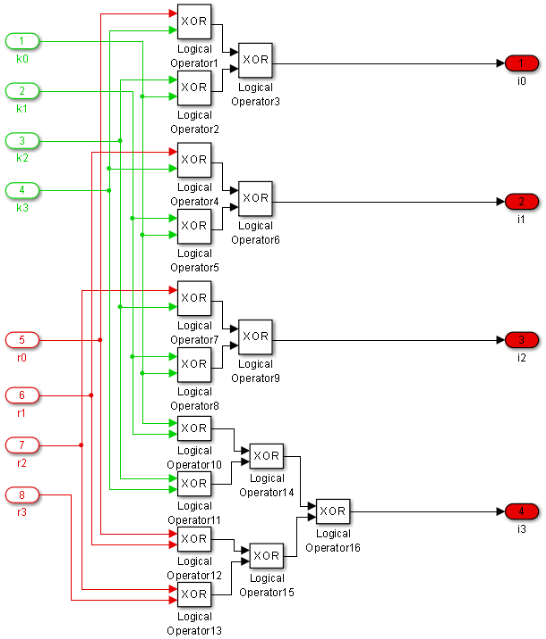
Рис. 10 Модель блока Decoder_inverse_code.
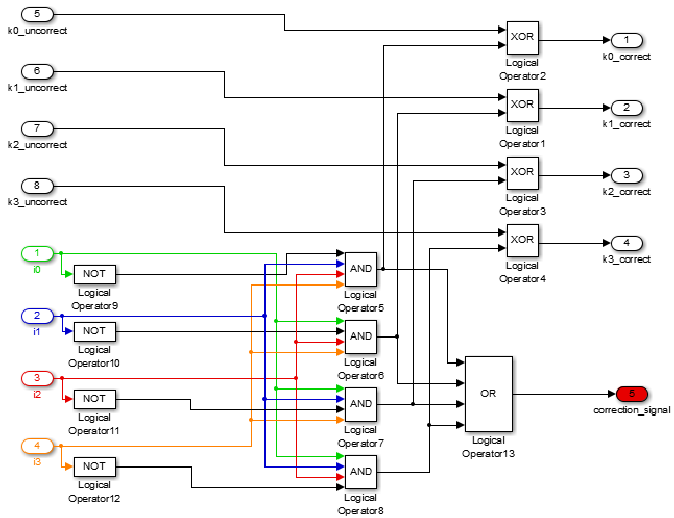
Рис. 11 Модель блока коррекции одиночных ошибок в информационных разрядах сообщения.
Элемент OR - формирует сигнал уведомления о срабатывании схемы коррекции (далее сигнал не используется, поэтому элемент использовать необязательно).
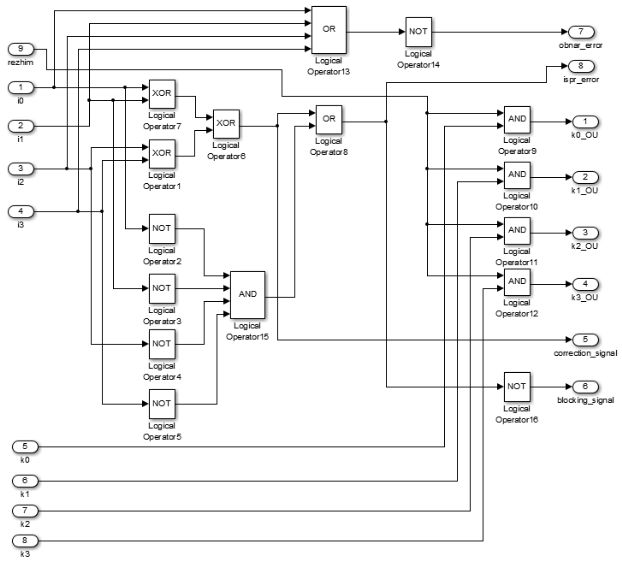
Рис. 12 Модель блока Keys.
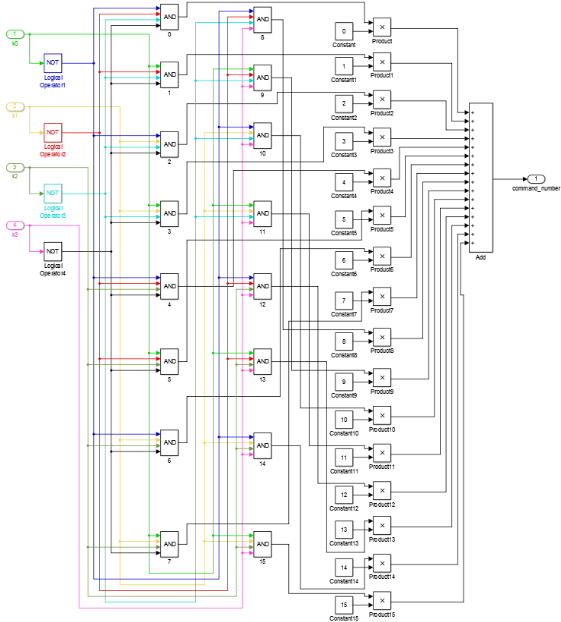
Рис. 13. Модель дешифратора принятых команд.
Дешифратор преобразует принятый двоичный код в десятичное число.
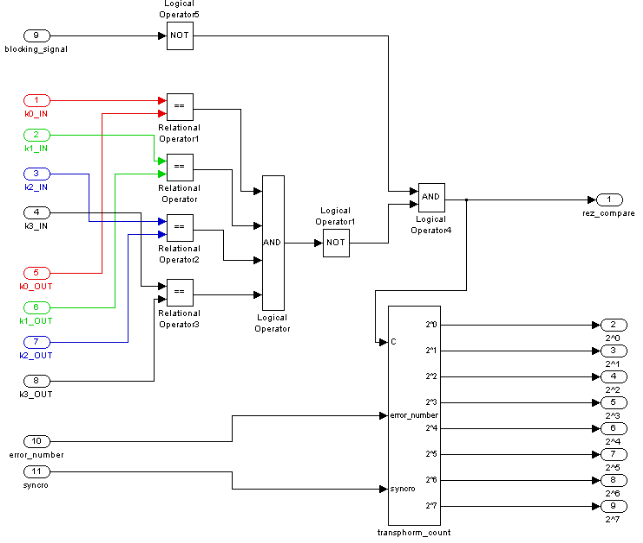
Рис. 14 Модель блока счетчика ошибок различной кратности Analyzer.
Анализатор осуществляет поразрядное сравнение передаваемых информационных разрядов и принятых (контрольные не учитываются) и подсчитывает в двоичном коде количество необнаруженных трансформаций заданной элементом Kratnost (рис. 1) кратности. Двоичный код отображается на индикаторе.
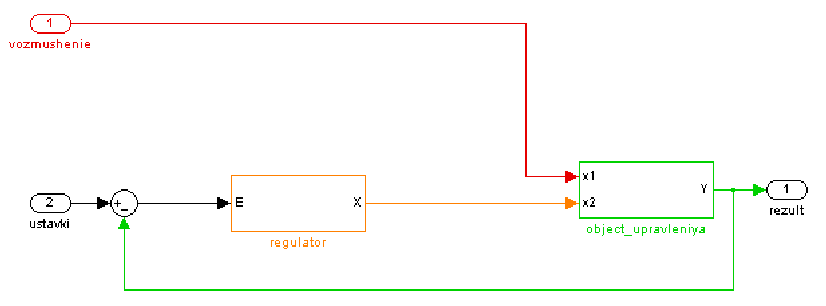
Рис. 15 Модель блока Local_SAR.
Regulator – модель регулятора.
Object_upravleniya – модель объекта регулирования.
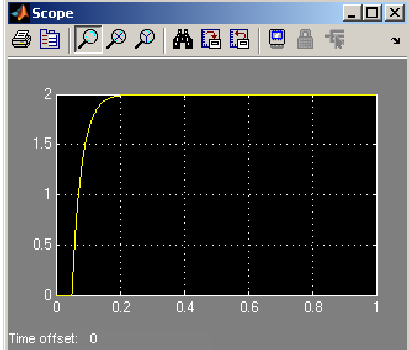
По кривой разгона определяем характеристики объекта управления.

|
Хст = 1
|
|
Yст = 2 |
|
К= 2
|
τ = 0,08 Т = 0,12


Для регулятора типа ПИ с минимумом средней квадратичной ошибки:
Kp
=

Tup = To,
где Kp - статический коэффициент передачи регулятора;
Tup- время изодрома регулятора;
Ko, To, τo - статический коэффициент передачи, замедление отклика и постоянная времени объекта регулирования соответственно.
Kp
=
 = 0,75
= 0,75
Tup = 0,12
Пусть q – вероятность искажения одного разряда (одного элемента кода), а P, Q – вероятности правильного и не правильного приема кодового слова, тогда:
P
=
 =
=
 = 0,663
= 0,663
Q = 1 – P = 1 – 0,663 = 0,337
Q = n ∙ q = 8 ∙ 0,05 = 0,4
Вывод: Вероятность возникновения ошибки при передачи сообщения обыкновенным кодом линейно возрастает с увеличением длины кода. Таким образом, чем больше информации необходимо передать, тем менее надежно она передается.
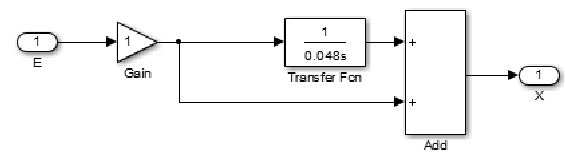
Рис. 16 Модель регулятора regulator.
В качестве примера приведена модель ПИ-регулятора.
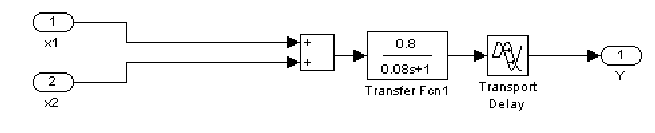
Рис. 17 Модель объекта регулирования.
Отобразим на осцилограмах основные шаги в получении кодовой комбинации на выходе:
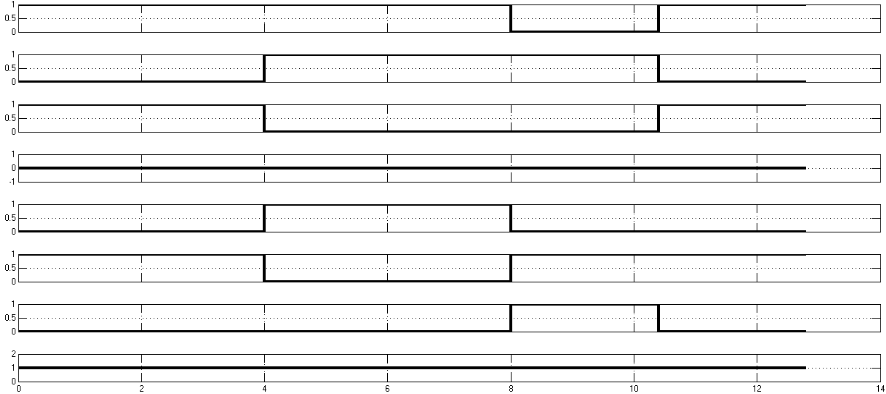
1) Показания осциллографа Code_Out .
2) Показания осциллографа Code_In .
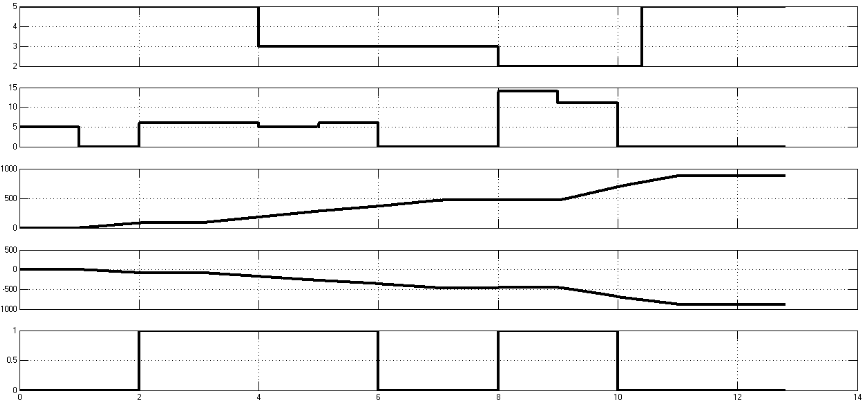
3) Показания осциллографа OU при включенном ключе rezhim .
4) Показания осциллографа OU при выключенном ключе rezhim .
Показания осциллографа Code_Out:
 Показания
осциллографа Code_In :
Показания
осциллографа Code_In :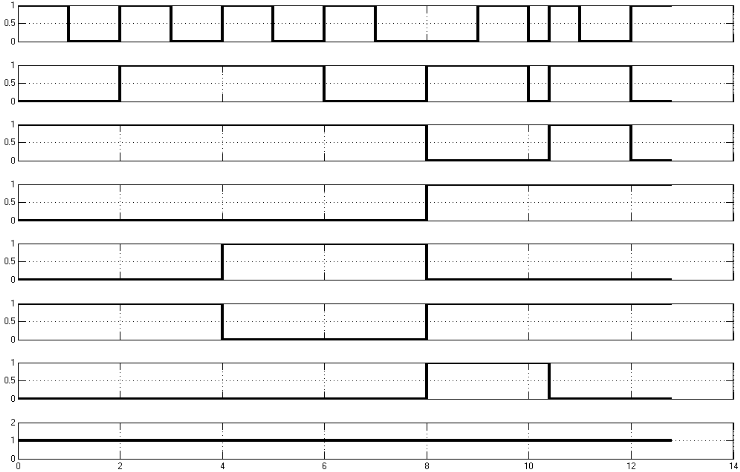
Показания осциллографа OU при включенном ключе rezhim :

Показания осциллографа OU при выключенном ключе rezhim :
Учебно-методическое обеспечение.
1. Шалягин Д.В., Цыбуля Н.А., Косенко С.С. и др. Устройства автоматики, телемеханики и связи: Учеб. для вузов ж.-д. трансп.; в 2 ч. – М.: Маршрут, 2006
2. Шалягин Д.В., Цыбуля Н.А., Боровков Ю.Г. Автоматика, телемеханика
и связь: Уч. пос. Ч.1. Автоматика и телемеханика. – М.:РГОТУПС, 2003.
3. Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теория дискретных устройств железнодорожной автоматики, телемеханики и связи: Учеб. для вузов ж.-д. трансп. – М.: Транспорт, 2001.
4. Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические
основы железнодорожной автоматики и телемеханики: Учеб. для вузов ж.-д. трансп. – М.: Транспорт, 1995
5. Инструкция: Типы регуляторов. Методика настройки регуляторов. КП
Микрол – Ивано-Франковск: 2011.